一种升降弓疲劳试验装置的制作方法
1.本实用新型属于升降弓测试技术领域,具体涉及一种升降弓疲劳试验装置。
背景技术:
2.升降弓,又称受电弓,安装在电力机车或电动车组车顶上,是一种电力牵引机车从接触网取得电能的电气设备。受电弓可分单臂弓和双臂弓两种,均由滑板、上框架、下臂杆、底架、升弓弹簧、传动气缸、支持绝缘子等部件组成。负荷电流通过接触线和受电弓滑板接触面的流畅程度,它与滑板与接触线间的接触压力、过渡电阻、接触面积有关,取决于受电弓和接触网之间的相互作用。
3.现有技术中,升降弓进行疲劳性能试验测量升降高度时,一般采用钢丝绳来测量,但升降弓弓头运动轨迹呈弧线,采用钢丝绳测量的实际高度与测量高度存在偏差,且升降弓升弓时发生横向振动,也导致测量高度存在偏差。
技术实现要素:
4.本实用新型的目的是提供一种升降弓疲劳试验装置,减小横向振动和升降弓弓头弧形运动轨迹带来的测量数据偏差。
5.本实用新型提供了如下的技术方案:
6.本技术提出一种升降弓疲劳试验装置,包括:
7.试验平台,试验平台内设有多个插槽,插槽底部嵌有第一磁块且插槽侧壁嵌有第一磁环,试验平台上设有推拉气缸,试验平台一侧设有升降机构;
8.基座,包括多个支脚和固定板,支脚插设于插槽内且支脚底部设有第二磁块,且支脚侧壁嵌有第二磁环;
9.升降弓本体,包括弓头,弓头下设有激光器,弓头与升降机构抵接;
10.拉绳编码器,拉绳编码器连接弓头且拉绳编码器内嵌有光敏传感器,光敏传感器连接推拉气缸,推拉气缸穿过固定板连接拉绳编码器。
11.优先地,还包括plc控制器,推拉气缸、激光器、拉绳编码器和光敏传感器均电性连接plc控制器。
12.优先地,所述plc控制器连接有上位机,上位机连接有打印机。
13.优先地,所述第一磁块和第二磁块极性相反,第一磁环和第二磁环极性相同。
14.优先地,所述插槽内处于第一磁块外侧设有减震环。
15.优先地,所述升降机构包括侧架和顶板,侧架一侧设有滑槽且滑槽外侧设有刻度,顶板滑动设于滑槽内,且顶板下嵌有接触式传感器,接触式传感器电性连接plc控制器和激光器。
16.优先地,所述固定板上升降弓本体一侧设有安置槽,拉绳编码器设于安置槽内,安置槽内设有通槽,推拉气缸连接有l型连接杆,且l型连接杆穿过通槽连接拉绳编码器。
17.本实用新型的有益效果是:
18.1.极性相异的第一磁块和第二磁块吸引,固定支脚,极性相同的第一磁环和第二磁环配合减震环减小升降弓的横向振动,确保升降弓的升弓降弓操作处于同一竖直平面内,减小测量数据偏差;
19.2.通过推拉气缸拉动拉绳编码器在安置槽内移动,使激光器光束发射于光敏传感器,确保拉绳编码器处于竖直状态,减小升降弓弧形运动轨迹带来的测量数据偏差。
附图说明
20.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
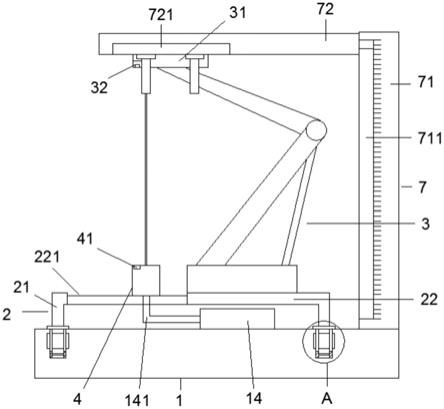
21.图1是本实用新型的连接示意图;
22.图2是本实用新型的标记a处的连接示意图;
23.图3是本实用新型的plc控制器连接示意图。
24.图中标记为:1.试验平台,11.插槽,12.第一磁块,13.第一磁环,14.推拉气缸,141.l型连接杆,15.减震环,2.基座,21.支脚,22.固定板,221.安置槽,23.第二磁块,24.第二磁环,3.升降弓本体,31.弓头,32.激光器,4.拉绳编码器,41.光敏传感器,5.plc控制器,6.上位机,61.打印机,7.升降机构,71.侧架,711.滑槽,72.顶板,721.接触式传感器。
具体实施方式
25.本技术提出一种升降弓疲劳试验装置,包括:
26.如图1-2所示,试验平台1,试验平台1内设有多个插槽11,插槽11底部嵌有第一磁块12且插槽11侧壁嵌有第一磁环13,试验平台1上设有推拉气缸14。第一磁块12和第二磁块23极性相反,第一磁环13和第二磁环24极性相同。插槽11内处于第一磁块12外侧设有减震环15。极性相异的第一磁块12和第二磁块23吸引,固定支脚21,极性相同的第一磁环13和第二磁环24配合减震环15减小升降弓的横向振动,确保升降弓的升弓降弓操作处于同一竖直平面内,减小测量数据偏差。
27.如图1所示,试验平台1一侧设有升降机构7。升降机构7包括侧架71和顶板72,侧架71一侧设有滑槽711且滑槽711外侧设有刻度,顶板72滑动设于滑槽711内,且顶板72下嵌有接触式传感器721,接触式传感器721电性连接plc控制器5和激光器32。
28.如图1-2所示,基座2,包括多个支脚21和固定板22,支脚21插设于插槽11内且支脚21底部设有第二磁块23,且支脚21侧壁嵌有第二磁环24。固定板22上升降弓本体3一侧设有安置槽221,拉绳编码器4设于安置槽221内,安置槽221内设有通槽,推拉气缸14连接有l型连接杆141,且l型连接杆141穿过通槽连接拉绳编码器4。
29.如图1所示,升降弓本体3,包括弓头31,弓头31下设有激光器32,弓头31与升降机构7抵接。
30.如图1所示,拉绳编码器4,拉绳编码器4连接弓头31且拉绳编码器4内嵌有光敏传感器41,光敏传感器41连接推拉气缸14,推拉气缸14穿过固定板22连接拉绳编码器4。通过特定固定方法与升降弓弓头31连接,通过升降弓上升与下降,拉绳编码器4从而读出编码器数据,并通过计算得出升降弓实际移动距离。
31.如图1所示,通过设定的高度,移动顶板72,使顶板72在滑动内竖直滑动,plc控制
器5控制升降弓本体3升弓后,弓头31与接触式传感器721接触两次后,激光器32开启,推拉气缸14通过l型连接杆141推动拉绳编码器4移动,当光敏传感器41置于激光器32正下方,即光敏传感器41阻值发生突变时,拉绳编码器4测量升降弓高度。
32.如图3所示,还包括plc控制器5,推拉气缸14、激光器32、拉绳编码器4和光敏传感器41均电性连接plc控制器5。plc控制器5连接有上位机6,plc控制器5自带通讯口与上位机6通过rs232接口连接。plc控制器5用于接收上位机6数据、上位机6指令,向执行元件出动作信号,同时接收拉绳编码器4检测到的实际数据,并将设备状态、试验数据发送给上位机6。上位机6用于采集plc控制器5传入数据、参数、设备设定试验参数、向plc控制器5发出执行指令、监控plc控制器5运行状态、根据各参数生成试验报告、保存试验数据、贮存试验数据及报告记录、查询试验记录。plc控制器5内设有计数器,升降高度达到设定值后计数1次,计数次数直至升降弓疲劳测试停止后。
33.如图3所示,上位机6连接有打印机61。测试数据可通过打印机61打印或导出,如测试升降弓本体3名称、厂家、型号、编号、时间、总疲劳次数、升降高度、多少次试验后出现过停顿与停顿的高度、实时监测升降弓本体3动态并生成数据。
34.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1