一种激光雷达承载装置、激光雷达设备和移动机器人的制作方法
1.本实用新型涉及雷达测距技术领域,尤其涉及一种激光雷达承载装置、激光雷达设备和移动机器人。
背景技术:
2.在移动机器人领域,为了提高移动机器人的安全性能和避障能力,一般会将激光雷达设置成360
°
扫描。一般是在机器人的顶部设置雷达导航装置,具体地,雷达导航装置包括基座、旋转平台、激光雷达、驱动机构和传动机构,传动机构设于基座的顶部,旋转平台与传动机构连接,激光雷达安装于旋转平台,而驱动机构设置在基座底部以驱动传动机构转动并带动旋转平台旋转以带动激光雷达实现360
°
扫描。但是,目前雷达导航装置的结构设计,会使得移动机器人具有较高的高度,这使得移动机器人难以进入低矮空间中工作。
技术实现要素:
3.本实用新型实施例的目的之一是提供一种激光雷达承载装置,以降低激光雷承载装置的高度,从而有利于装载激光雷达的移动机器人能够进入低矮的空间中工作。
4.为实现上述目的,本实用新型实施例采用的技术方案如下:
5.一种激光雷达承载装置,包括基座、旋转平台、动力机构、传动机构和顶盖;
6.所述旋转平台用于承载激光雷达收发模组;
7.所述旋转平台、所述动力机构和所述传动机构均设于所述基座的顶部;
8.所述动力机构用于驱动所述传动机构以带动所述旋转平台旋转;所述动力机构包括用于连接所述传动机构的输出轴;
9.所述旋转平台的旋转中心轴与所述输出轴沿水平方向呈间隔设置;
10.所述顶盖设于所述基座的顶部并遮盖所述旋转平台和所述传动机构。
11.在一种可能的实施方式中,所述顶盖包括第一盖体和第二盖体;
12.所述第二盖体与所述旋转平台连接,并罩盖所述旋转平台、部分所述传动机构以及部分所述基座;
13.所述第一盖体与所述基座连接并罩盖所述传动机构的剩余部分,且所述第一盖体的局部从所述第二盖体的下端缘延伸至所述第二盖体内。
14.在一种可能的实施方式中,所述顶盖包括第一盖体和第二盖体,所述第二盖体与所述基座连接,并罩盖所述旋转平台、所述动力机构、所述第二盖体、所述传动机构以及所述基座;
15.所述第一盖体与所述基座连接并罩盖部分所述传动机构。
16.在一种可能的实施方式中,所述动力机构还包括电机,所述电机安装于所述第一盖体的顶部,所述输出轴穿设于所述第一盖体且一端连接所述电机、另一端连接所述传动机构。
17.在一种可能的实施方式中,所述第一盖体包括第一盖板和第一侧板,所述第一盖
板与所述基座连接并罩盖部分的所述传动机构,且所述第一盖板的一端从所述第二盖体的下端缘延伸至所述第二盖体内;所述第一侧板从所述第一盖板的部分边缘向下延伸。
18.在一种可能的实施方式中,所述第一盖体还包括第二侧板,所述第二侧板从所述第一盖板的部分边缘向上延伸并包覆在所述第二盖体的部分内侧面;
19.和/或,所述第二盖体包括第二盖板和周向侧板,所述周向侧板从所述第二盖板的边缘向下延伸并包覆所述基座剩余部分的外侧面。
20.在一种可能的实施方式中,所述基座的顶部形成有第一凸缘,所述第一凸缘自所述基座的顶部边缘向上凸设,且延伸至第二盖体内,并包覆所述第二盖体的部分内侧面;
21.或者,所述基座的顶部形成有第一凸缘和与所述第一凸缘连接的第二凸缘,所述第一凸缘和所述第二凸缘均自所述基座的顶部边缘向上凸设且分别延伸至所述第二盖体、所述第一盖体内。
22.在一种可能的实施方式中,所述传动机构包括第一传动轮、第二传动轮和连接于所述第一传动轮和所述第二传动轮之间的传动带;所述第一传动轮与所述输出轴连接,所述第二传动轮与所述旋转平台连接。
23.相对于现有技术而言,本实用新型实施例提供的激光雷达承载装置,将旋转平台、动力机构以及传动机构都设置在基座的顶部,改变了现有激光雷达承载装置自下而上依次为动力机构、基座、传动机构、旋转平台的结构,使得激光雷达承载装置的高度得到有效地降低,有利于提高激光雷达承载装置的空间利用率,提高激光雷达承载装置的结构紧凑性和可靠性,将激光雷达承载装置搭载激光雷达收发模组构成激光雷达设备时,可使得激光雷达设备的体积变得更小。
24.本实用新型实施例的第二个目的是提供一种激光雷达设备,其具体的技术方案如下:
25.激光雷达设备,包括上述所述的激光雷达承载装置;
26.激光雷达收发模组,所述激光雷达收发模组安装于所述旋转平台。
27.相对于现有技术而言,本实用新型实施例提供的激光雷达设备,由于其包括上述的激光雷达承载装置,因此具有较小的体积和较低的高度,并且激光雷达设备的结构更加紧凑。
28.本实用新型实施例的第三个目的是提供一种移动机器人,其具体的技术方案如下:
29.移动机器人,包括上述所述的激光雷达设备和机器人主体,且所述激光雷达设备安装在所述机器人主体的顶部。
30.相对与现有技术而言,本实用新型实施例提供的移动机器人,由于其包括上述的激光雷达设备,而激光雷达设备的高度变得更低、体积更小、结构更加紧凑,因此能有效降低移动机器人的高度,方便移动机器人钻入狭小或者低矮空间中进行工作。
附图说明
31.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其
他的附图。
32.图1为本实用新型实施例一提供的激光雷达承载装置的立体结构示意图;
33.图2为本实用新型实施例一提供的激光雷达承载装置的爆炸结构示意图;
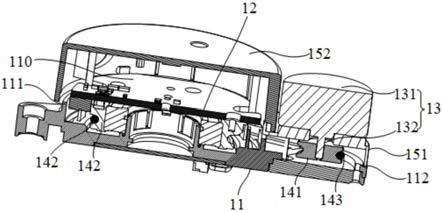
34.图3为本实用新型实施例一提供的激光雷达承载装置的剖视示意图;
35.图4为本实用新型实施例二提供的激光雷达承载装置的立体结构示意图;
36.图5为本实用新型实施例二提供的激光雷达承载装置的爆炸结构示意图;
37.图6为本实用新型实施例二提供的激光雷达承载装置的剖视示意图。
38.附图标记:
39.10、激光雷达承载装置;110、容纳腔;
40.11、基座;111、第一凸缘;112、第二凸缘;
41.12、旋转平台;
42.13、动力机构;131、电机;132、输出轴;
43.14、传动机构;141、第一传动轮;142、第二传动轮;143、传动带;
44.15、顶盖;151、第一盖体;1511、第一盖板;1512、第一侧板;1513、第二侧板;152、第二盖体;1521、第二盖板;1522、周向侧板。
具体实施方式
45.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
46.实施例一
47.本实用新型实施例提供的激光雷达承载装置10的结构示意图如图1至图3所示。
48.请参阅图1和图2,本实施例的激光雷达承载装置10包括基座11、旋转平台12、动力机构13、传动机构14和顶盖15。其中,旋转平台12用于承载激光雷达收发模组(图中未示意);旋转平台12、动力机构13和传动机构14均设于基座11的顶部;动力机构13包括用于连接传动机构14的输出轴132,并且,动力机构13用于驱动传动机构14以带动旋转平台12旋转;旋转平台12的旋转中心轴与输出轴132沿水平方向呈间隔设置;顶盖15设于基座11的顶部并遮盖旋转平台12和传动机构14。这样的结构设计,可以有效地降低激光雷达承载装置10的高度,将激光雷达承载装置10组装成激光雷达设备并且用于移动机器人时,也可以有效降低移动机器人的高度,从而方便移动机器人钻入低矮空间中进行工作。
49.请参阅图1、图2和图3,在一些实施方式中,顶盖15包括第一盖体151和第二盖体152。其中,第二盖体152与旋转平台12连接,并罩盖旋转平台12、部分传动机构14以及部分基座11;由第二盖体152和基座11围合形成用于容纳激光雷达收发模组的容纳腔110。第一盖体151与基座11连接并罩盖传动机构14的剩余部分,且第一盖体151的局部从第二盖体152的下端缘延伸至第二盖体152内。第一盖体151延伸至第二盖体152内的部分,与第二盖体152的下端缘之间具有间距,以避免第一盖体151在第二盖体152和旋转平台12按照旋转平台12的旋转中心轴转动时,阻碍第二盖体152的转动。这样的结构设计,能够有效抑制外部异物从第一盖体151与基座11之间的缝隙以及从第二盖体152与基座11之间的缝隙进入
激光雷达承载装置10内。
50.请参阅图1、图2和图3,在一些实施方式中,第一盖体151包括第一盖板1511和第一侧板1512;其中,第一盖板1511与基座11连接并罩盖部分的传动机构14,且第一盖板1511的一端从第二盖体152的下端缘延伸至第二盖体152内;第一侧板1512从第一盖板1511的部分边缘向下延伸。通过第一盖板1511穿设至第二盖体152内以及第一侧板1512从第一盖板1511的部分边缘向下延伸设置,可以有效地提高第一盖体151对激光雷达承载装置10的密封效果,有效抑制外界异物沿着第一盖体151与第二盖体152之间的缝隙以及第一盖体151与基座11之间的缝隙进入激光雷达承载装置10内。
51.请参阅图1、图2和图3,在一些实施方式中,第一盖体151还包括第二侧板1513,第二侧板1513从第一盖板1511的部分边缘向上延伸并包覆在第二盖体152的部分内侧面,并且第二侧板1513与第二盖体152之间具有间距,从而可以避免第二侧板1513阻碍第二盖体152以旋转平台12的旋转中心轴转动,以有效提高激光雷达承载装置10的结构可靠性。
52.请参阅图1、图2和图3,在一些实施方式中,第二盖体152包括第二盖板1521和周向侧板1522,周向侧板1522从第二盖板1521的边缘向下延伸并包覆基座11剩余部分的外侧面。第二盖体152的结构设计,一方面有利于形成容纳腔110,供旋转平台12、激光雷达收发模组以及局部传动机构14容置;另一方面,有利于提高激光雷达承载装置10的密封效果,有效抑制外界异物沿着第二盖体152和基座11之间的缝隙进入激光雷达承载装置10内。
53.请参阅图1、图2和图3,在一些实施方式中,基座11的顶部形成有第一凸缘111,第一凸缘111自基座11的顶部边缘向上凸设,并且延伸至第二盖体152内,并包覆第二盖体152的部分内侧面。在另一些实施方式中,基座11的顶部形成有第一凸缘111和第二凸缘112,第一凸缘111自基座11的顶部边缘向上凸设并延伸至第二盖体152内,第二凸缘112自基座11的顶部边缘向上凸设并延伸至第一盖体151内,而且第一凸缘111和第二凸缘112首尾连接以环设于基座11的顶部。这样的结构设计,进一步增加外界异物从基座11和顶盖15之间的间隙进入激光雷达承载装置10内的难度,有利于提高激光雷达承载装置10的密封可靠性。
54.请参阅图1、图2和图3,在一些实施方式中,动力机构13还包括电机131,电机131安装于第一盖体151的顶部,输出轴132则穿设于第一盖体151,并且输出轴132的一端连接电机131、另一端连接传动机构14。这样的结构设计,可以将电机131外置,一方面可以借助第一盖体151承载电机131;另一方面,有利于电机131在工作过程中的散热;再一方面,还可以有效地提高激光雷达承载装置10的结构紧凑性,降低激光雷达承载装置10的高度。
55.请参阅图1、图2和图3,在一些实施方式中,传动机构14包括第一传动轮141、第二传动轮142和传动带143,其中第一传动轮141与输出轴132连接,第二传动轮142则与旋转平台12连接,即旋转平台12安装于第二传动轮142的顶端,传动带143则连接于第一传动轮141和第二传动轮142之间,从而实现动力机构13驱动传动机构14转动。在本实施例的实施方式中,第一盖体151罩盖第一传动轮141、部分传动带143和部分基座11;第二盖体152罩盖第二传动轮142、旋转平台12、传动带143的剩余部分以及部分基座11。
56.基于上述激光雷达承载装置10,本实用新型实施例还提供一种激光雷达设备。
57.具体地,激光雷达设备包括上述的激光雷达承载装置10和激光雷达收发模组,其中,激光雷达收发模组安装于旋转平台12,从而当动力机构13驱动传动机构14转动时,旋转平台12以旋转中心轴旋转,带动激光雷达收发模组以及第二盖体152进行360
°
转动,激光雷
达收发模组360
°
转动时,能够扫描除被电机131阻挡的区域外的其他区域,由于电机131占据的空间比较小,因此通过损失扫描的局部区域来降低激光雷达设备的高度,使得激光雷达设备能够进入更加狭小的空间中工作。
58.由于本实用新型实施例的激光雷达设备的高度相对于现有的激光雷达设备的高度有所降低,因此将其组装至移动机器人的顶部,从而可以有效提高移动机器人的避障性能和安全性能,在激光雷达设备高度有所降低后,移动机器人的整体高度也有所降低,因此移动机器人可以进入低矮空间中工作,使得移动机器人的工作空间更为广阔,具体的本实用新型的激光雷达设备可以作为扫地机器人、无人搬运车(automated guided vehicle,简称agv)等的激光雷达避障扫描部件,也可以作为自动驾驶设备的避障探测部件。在一些实施方式中,包括本实用新型激光雷达设备的扫地机器人可以进入到沙发、床底等低矮空间,而包括本实用新型激光雷达设备的搜寻机器人则可以钻入货架等的底部进行搜索;包括本实用新型激光雷达设备的探测机器人则可以进入管道、下水道等狭小的空间里。在一些实施方式中,移动机器人包括机器人主体和本实用新型实施例提供的激光雷达设备,并且激光雷达设备安装在机器人主体的顶部。
59.实施例二
60.请参阅图4至图6以及图1至图3,本实施例提供的激光雷达承载装置10、激光雷达设备以及移动机器人与实施例一的区别主要在于如下所述结构的不同:
61.在实施例一中,顶盖15包括第一盖体151和第二盖体152。其中,第二盖体152与旋转平台12连接,并罩盖旋转平台12、部分传动机构14以及部分基座11;由第二盖体152和基座11围合形成用于容纳激光雷达收发模组的容纳腔110。第一盖体151与基座11连接并罩盖传动机构14的剩余部分,且第一盖体151的局部从第二盖体152的下端缘延伸至第二盖体152内。第一盖体151延伸至第二盖体152内的部分,与第二盖体152的下端缘之间具有间距,以避免第一盖体151在第二盖体152和旋转平台12按照旋转平台12的旋转中心轴转动时,阻碍第二盖体152的转动。
62.而在本实施例中,顶盖15包括第一盖体151和第二盖体152,第二盖体152与基座11连接,并罩盖旋转平台12、动力机构13、第二盖体152、传动机构14以及所述基座11;第一盖体151与基座11连接并罩盖部分传动机构14。也就是第二盖体152将第一盖体151、旋转平台12、动力机构13和传动机构14全部罩盖,使得动机机构被收纳于激光雷达承载装置10内部。搭载激光雷达收发模组得到的激光雷达设备,在工作时,动力机构13驱动传动机构14转动,并由传动机构14带动旋转平台12转动,由旋转平台12携带激光雷达收发模组进行360
°
扫描,顶盖15不转动,由此可以有效地保护动力机构13。
63.除了上述的结构设置方案与实施例一不同外,本实施例二提供的激光雷达承载装置10、激光雷达设备以及移动机器人均可参照实施例一对应设计,为节约篇幅,在此不再展开赘述。
64.以上仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1