1.本实用新型涉及一种起重机械测量装置,尤其是涉及一种起重机械金属结构形变测量装置。
背景技术:2.起重机械等的主梁多采用箱型的金属结构,为获取起重机械结构的健康状况,需要对其形变进行测量。现有方法多采用人工分段标记后,逐段测量。当测量对象较大,且测量点人不易到达时,测量效率低,精度差。
技术实现要素:3.本实用新型的目的就是为了克服上述现有技术存在的缺陷而提供一种起重机械金属结构形变测量装置。
4.本实用新型的目的可以通过以下技术方案来实现:
5.一种起重机械金属结构形变测量装置,该装置包括支撑架、距离测量模块、旋转驱动模块,所述的距离测量模块上安装有两个测距传感器,分别为第一测距传感器和第二测距传感器,所述的两个测距传感器的测距方向之间的夹角为90
°
,所述的第一测距传感器上设有用于测量该测距传感器与铅垂线之间倾斜角度的倾角传感器,所述的距离测量模块通过旋转驱动模块安装在支撑架上,所述的支撑架用于将所述的距离测量模块水平架设在待测金属结构表面上方位置,所述的测距传感器、倾角传感器和旋转驱动模块均连接至控制器。
6.优选地,所述的测距传感器包括激光测距传感器。
7.优选地,所述的旋转驱动模块包括转动杆和电机,所述的转动杆通过轴承水平安装在支撑架上,所述的电机的转轴连接所述的转动杆,所述的距离测量模块固定在所述的转动杆上,所述的电机连接所述的控制器。
8.优选地,所述的电机包括伺服电机。
9.优选地,所述的支撑架包括顶部支撑板、侧部支架和可调支腿,所述的侧部支架设置两个,分别固定在顶部支撑板下方两侧形成框体结构,所述的可调支腿安装在侧部支架底部用于调整所述的支撑架的整体水平度,所述的转动杆转动安装在两个侧部支架之间,所述的转动杆与所述的顶部支撑板平行。
10.优选地,所述的可调支腿包括磁性支腿和可调螺栓,所述的磁性支腿通过可调螺栓安装在侧部支架底部。
11.优选地,所述的顶部支撑板设有用于测量水平度的水平仪。
12.优选地,所述的可调支腿设置三个,其中两个可调支腿安装在一个侧部支架下方,另一个可调支腿安装在另一个侧部支架下方,三个可调支腿形成等腰三角分布形式。
13.优选地,所述的控制器包括具有数字处理能力的微处理器。
14.优选地,所述的测距传感器和倾角传感器通过无线通信模块连接所述的控制器。
15.与现有技术相比,本实用新型具有如下优点:
16.(1)本实用新型采用测距传感器对金属结构两侧的距离进行测量,同时测量测距传感器的倾角,通过换算金属结构表面测量点的位置信息(包括测量点与距离传感器中心点的水平距离和垂直距离),由此快速确定金属结构表面的形变情况,测量精度高、速度快;
17.(2)本实用新型采用双激光测距方式进行距离测量,保证了测量精度。
附图说明
18.图1为本实用新型一种起重机械金属结构形变测量装置的主视图;
19.图2为本实用新型一种起重机械金属结构形变测量装置的侧视图;
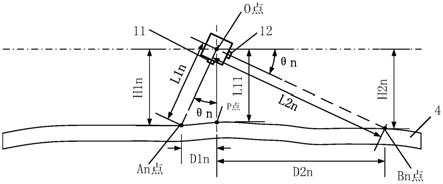
20.图3为本实用新型一种起重机械金属结构形变测量装置的测量原理图。
21.图中,1为距离测量模块,11为第一测距传感器,12为第二测距传感器,21 为转动杆,22为电机,31为顶部支撑板,32为侧部支架,33为可调支腿,4为待测金属结构。
具体实施方式
22.下面结合附图和具体实施例对本实用新型进行详细说明。注意,以下的实施方式的说明只是实质上的例示,本实用新型并不意在对其适用物或其用途进行限定,且本实用新型并不限定于以下的实施方式。
23.实施例
24.如图1、图2所示,本实施例提供一种起重机械金属结构形变测量装置,该装置包括支撑架、距离测量模块1、旋转驱动模块,距离测量模块1上安装有两个测距传感器,分别为第一测距传感器11和第二测距传感器12,两个测距传感器的测距方向之间的夹角为90
°
,第一测距传感器11上设有用于测量该测距传感器与铅垂线之间倾斜角度的倾角传感器(倾角传感器集成在第一测距传感器11上,图中并未示出倾角传感器的具体位置),距离测量模块1通过旋转驱动模块安装在支撑架上,支撑架用于将距离测量模块1水平架设在待测金属结构4表面上方位置,测距传感器、倾角传感器和旋转驱动模块均连接至控制器,控制器包括具有数字处理能力的微处理器,测距传感器和倾角传感器通过无线通信模块连接控制器。。
25.其中,测距传感器包括激光测距传感器。
26.旋转驱动模块包括转动杆21和电机22,转动杆21通过轴承水平安装在支撑架上,电机22的转轴连接转动杆21,距离测量模块1固定在转动杆21上,电机 22连接控制器,电机22采用伺服电机。
27.支撑架包括顶部支撑板31、侧部支架32和可调支腿33,侧部支架32设置两个,分别固定在顶部支撑板31下方两侧形成框体结构,可调支腿33安装在侧部支架32底部用于调整支撑架的整体水平度,转动杆21转动安装在两个侧部支架32 之间,转动杆21与顶部支撑板31平行。
28.可调支腿33包括磁性支腿和可调螺栓,磁性支腿通过可调螺栓安装在侧部支架32底部。顶部支撑板31设有用于测量水平度的水平仪。可调支腿33设置三个,其中两个可调支腿33安装在一个侧部支架32下方,另一个可调支腿33安装在另一个侧部支架32下方,三个可调支腿33形成等腰三角分布形式,磁性支腿可通过磁性吸附在待测金属结构4表面上,然后调节可调螺栓高度来调整可调支腿33的高度使得整个装置处于水平位置(及保证转动杆
21水平),此调平过程可以通过顶部支撑板31上的水平仪进行快速调平。设置三个可调支腿33可形成三角支撑形式,保证装置的稳固性。
29.控制器用于生成伺服驱动控制信号,将伺服驱动控制信号发送至伺服电机控制距离测量模块1的转动,同时在测量过程中接收距离测量模块1发送的距离数据和倾角传感器发送的角度数据,储存数据,分析处理得到形变信息。
30.采用上述形变测量装置进行起重机械金属结构形变测量的具体过程为:
31.固定支撑架位置,调整距离测量模块1的初始位置,使得第一测距传感器11 的测距方向沿铅垂线方向垂直向下,第二测距传感器12的测距方向为水平方向;
32.控制器发送控制信号控制旋转驱动模块运动,旋转驱动模块带动距离测量模块 1旋转直至旋转驱动该模块旋转90
°
角度,距离测量模块1旋转过程中实时接收第一测距传感器11和第二测距传感器12的测距数据以及倾角传感器的倾角数据;
33.控制器根据获取的测距数据以及倾角数据获取待测金属结构4表面测量点的位置信息,包括测量点与距离测量模块1中心点的水平距离和垂直距离,进而确定金属结构表面形变情况。
34.形变测量的原理为:
35.如图3所示,距离测量模块中心点记作o点,在测量过程中,将第一测距传感器11的测距数据记作l11,l12,l13,
……
,l1n,第二测距传感器12的测距数据记作l21,l22,l23,
···
,l2n,倾角传感器的倾角数据记作θ1,θ2,θ3,
……
,θn;
36.计算得到第一测距传感器11对应的测量点ai以及第二测距传感器12对应的测量点bi位置信息:d1i=l1i
·
sinθi,h1i=l1i
·
cosθi,d2i=l2i
·
cosθi,h2i=l2i
·
sinθi, d1i为测量点ai与距离测量模块中心点的水平距离,h1i为测量点ai与距离测量模块中心点的垂直距离,d2i为测量点bi与距离测量模块中心点的水平距离,h2i 为测量点bi与距离测量模块中心点的垂直距离,i=1,2,
……
,n;
37.基于h1i、h2i、d1i、d2i确定发生形变的测量点以及对应的位置,若待测金属结构4表面无任何形变,则h1i、h2i应保持不变,若h1i、h2i大小发生变化,可以与设置阈值大小进行比较,却行待测金属结构4表面为凸起或凹陷,从而获取对应点的水平距离信息,对发生形变点的位置进行定位。
38.采用测距传感器对金属结构两侧的距离进行测量,同时测量测距传感器的倾角,通过换算金属结构表面测量点的位置信息(包括测量点与距离传感器中心点的水平距离和垂直距离),由此快速确定金属结构表面的形变情况,测量精度高、速度快。
39.上述实施方式仅为例举,不表示对本实用新型范围的限定。这些实施方式还能以其它各种方式来实施,且能在不脱离本实用新型技术思想的范围内作各种省略、置换、变更。