一种用于水下机器人的采水装置的制作方法
1.本实用新型涉及采水领域,尤其涉及一种用于水下机器人的采水装置。
背景技术:
2.在海洋科考实验中,对目标海域的海水进行采集已经成为必要环节,在同一目标海域内还需要采集不同深度的样本。
3.当前常用的采水装置有两种:一种是纯机械结构,把采水器沉入所需深度,然后上提系绳,上盖和下入水自动关闭,即可得到相应深度的水样;另一类是使用船上的吊车释放采水瓶框架,通过采水控制器,使采水瓶闭合。
4.但是这些装置在实际使用中还是存在一些缺陷和不足,如每次取水操作只能完成一个深度段的取水,机动性不足,操作较为繁琐,给采样人员带来一定的不便,从而工作效率低。
技术实现要素:
5.为了解决上述背景技术所存在的至少一技术问题,本实用新型提供一种用于水下机器人的采水装置。
6.为实现上述目的,本实用新型的技术方案是:
7.一种用于水下机器人的采水装置,包括释放框架、释放器;
8.所述释放框架用于安装若干采水瓶;
9.所述释放器安装在释放框架中,包括外壳、电机、若干释放勾以及拨杆;若干释放勾间隔安装在外壳上,一释放勾用于固定一牵拉线的一端,一牵拉线用于和一采水瓶的上下两个端盖相连接;所述拨杆由电机带动转动,当拨杆转动至某一释放勾时,释放勾上的牵拉线被拔掉释放。
10.进一步地,所述的用于水下机器人的采水装置还包括转勾器,所述转勾器设置有若干个,并安装在所述释放框架上,一转勾器用于牵引一牵拉线。
11.进一步地,所述转勾器包括转勾器底座以及转勾;
12.所述转勾器底座有两个耳孔,用于牵引牵拉线,所述转勾通过螺栓固定在转勾器底座上,能摆动,转勾的两端能挂牵拉线。
13.进一步地,所述的用于水下机器人的采水装置还包括采水瓶固定块,所述采水瓶固定块设置有若干块,并安装在所述释放框架中;
14.所述采水瓶固定块包括采水瓶上部固定块和采水瓶下部固定块;
15.所述采水瓶上部固定块整体为阶梯形状,中间有一圆形孔,用于固定采水瓶支架的一端;
16.所述采水瓶下部固定块采用铝合金材料,中间有一凹槽,用于固定采水瓶支架的另一端。
17.进一步地,所述释放框架包括侧面框架、释放器支撑架、采水瓶支撑架、转勾器支
撑架以及横梁;
18.所述侧面框架用于支撑横梁和转勾器支撑架,所述采水瓶支撑架用于支撑采水瓶,所述转勾器支撑架用于安装转勾器。
19.进一步地,所述侧面框架为焊接件,通过螺栓与横梁、采水瓶支撑架以及转勾器支撑架相互连接;
20.所述释放器支撑架为焊接件,通过螺栓与横梁相互连接;
21.所述采水瓶支撑架为角铝,通过螺栓固定到侧面框架上,采水瓶支撑架上有多个螺孔,用于固定采水瓶固定块;
22.所述转勾器支撑架为角铝,其中一个面上有多个螺孔,用于固定转勾器。
23.进一步地,所述转勾器底座固定在转勾器支撑架上;所述转勾器底座两边是圆形耳孔,用于牵引牵拉线;所述转勾通过螺栓固定在转勾器底座上,转勾一端挂释放器上的牵拉线,转勾另一端挂采水瓶上的牵拉线,当释放器转动时,对应转勾上一端的牵拉线松弛,另一端的牵拉线从转勾上脱离。
24.进一步地,所述释放框架为铝合金。
25.进一步地,所述牵拉线为尼龙线。
26.进一步地,所述转勾器和采水瓶固定块的设置数量均为8。
27.本实用新型与现有技术相比,其有益效果在于:
28.本实施例提供的用于水下机器人的采水装置可以安装多个采水瓶,实现多位采水,而当采水完毕后,则可以通过控制拨杆的转动能够实现采水瓶盖的关闭,从而帮助操作人员快速完成采水任务。
附图说明
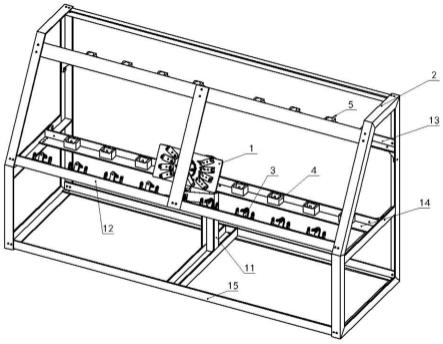
29.图1为本实用新型实施例提供的用于水下机器人的采水装置的应用示意图;
30.图2为本实用新型实施例提供的采水装置组件释放器的整体结构
31.图3是本实用新型实施例提供的用于水下机器人的采水装置的结构示意图;
32.图4是本实用新型实施例提供的采水装置组件释放器的侧面示意图;
33.图5是本实用新型实施例提供的采水装置组件转勾器的结构示意图;
34.图6是本实用新型实施例提供的采水装置组件采水瓶固定块的结构示意图;
35.图中:1-释放器;2-侧面架;3-转勾器;4-采水瓶下部固定块;5-采水瓶上部固定块;6-拔杆;7-释放勾;8-电机;9-转勾器底座;10-转勾;11-释放器支撑架;12-转勾器支撑架;13-采水瓶上部支撑架;14-采水瓶下部支撑架;15-横梁;100-释放框架;200-采水瓶。
具体实施方式
36.实施例:
37.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接、信号连接;可以是直接相连,也可以是通过中间媒介间接连接,可以说两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明的具体含义。下面结合附图和实施例对本发明的技术方案做进一步的说明。
38.参阅图1-6所示,本实施例提供的用于水下机器人的采水装置主要包括释放框架100和释放器1。
39.其中,该释放框架100安装有八个采水瓶200;该释放器1则安装在释放框架100中,释放器1包括外壳、电机8、八释放勾7以及拨杆6;八干释放勾7间隔安装在外壳上,一释放勾7用于固定一牵拉线的一端,一牵拉线用于和一采水瓶的上下两个端盖相连接,刚开始时,采水瓶受到牵拉线的拉力,上下两个端盖是处于打开状态;该拨杆6由电机8带动转动,当拨杆6转动至某一释放勾7时,释放勾7上的牵拉线被拔掉释放,松弛脱落,采水瓶上的两个端盖在没有拉力的情况下就会回到关闭的位置。
40.由此可见,本实施例提供的用于水下机器人的采水装置可以安装多个采水瓶,实现多位采水,而当采水完毕后,则可以通过控制拨杆的转动能够实现采水瓶盖的关闭,从而帮助操作人员快速完成采水任务。
41.具体地,如图2所示,为拔杆6的的示意图,其下方有一个突出的杆61,当拔杆6转到其中一个释放勾7上时,就会把释放勾7上的牵引线拔下来。由于拔杆6的转动是通过释放器里电机8带动的,电机8转动的度数可以精确到0.2度,完全可以控制拔干精确的转到任一个释放勾上,从而精确的控制每一个采水瓶的端盖的关闭
42.优选地,上述的用于水下机器人的采水装置还包括转勾器3,该转勾器3设置有八个,间隔安装在该释放框架上,一转勾器3用于牵引一牵拉线。如此,通过设置有转勾器3,以便于布置牵拉线,使得采水瓶的上下两个端盖受到牵拉线的拉力。具体地,该转勾器3包括转勾器底座9以及转勾10;该转勾器底座9有两个耳孔,用于牵引牵拉线,该转勾10通过螺栓固定在转勾器底座9上,可以摆动,转勾10的两端可以挂牵拉线。
43.优选地,上述的用于水下机器人的采水装置还包括采水瓶固定块,该采水瓶固定块设置有八干块,并安装在所述释放框架中;该采水瓶固定块包括采水瓶上部固定块5和采水瓶下部固定块4;该采水瓶上部固定块5采用铝合金材料,整体为阶梯形状,中间有一圆形孔,用于固定采水瓶支架的一端;该采水瓶下部固定块4采用铝合金材料,中间有一凹槽,用于固定采水瓶支架的另一端。如此,通过设置有采水瓶固定块,以便于实现快速安装采水瓶。
44.具体地,上述的释放框架包括两侧面框架2、释放器支撑架11、采水瓶支撑架13、转勾器支撑架12以及横梁15。
45.该两个侧面框架2为焊接件,通过螺栓与三个横梁15、采水瓶上部支撑架13、采水瓶上下部支撑架14以及转勾器支撑架12相互连接;所述释放器支撑架11为焊接件,通过螺栓与横梁15相互连接;所述采水瓶上部支撑架13为角铝,通过螺栓固定到两个侧面框架上,采水瓶上部支撑架13上有多个螺孔,用于固定采水瓶上部固定块5;所述采水瓶下部支撑架14为角铝,通过螺栓固定到两个侧面框架上,采水瓶上部支撑架14上有多个螺孔,用于固定采水瓶下部固定块4;所述转勾器支撑架12为角铝,其中一个面上有多个螺孔,用于固定转勾器底座9。
46.具体地,该释放器1外壳材料为铝合金,内部充满油,用于安装电机等机械结构,释放器外壳通过抱箍与释放器支撑架11连接;该电机8为步进电机,通过驱动控制板的控制,为释放器1的转动提供动力;该释放勾7材料为不锈钢,通过螺栓固定在释放器外壳上,八个释放勾对称布置在两边,用于固定尼龙线的一端;该拔杆6与电机8相连,用于拔掉释放勾上
的尼龙线。
47.具体地,转勾器底座9为不锈钢材料,底部有四个孔,可以通过螺栓固定在转勾器支撑架12上;所述转勾器底座9两边是圆形耳孔,用于牵引牵引线;所述转勾10通过螺栓固定在转勾器底座9上,转勾10一端挂释放器上的挂牵引线,转勾10另一端挂采水瓶上的牵引线,当释放器1转动时,对应转勾10上一端的牵引线松弛,另一端的牵引线从转勾上脱离,从而使得采水瓶的盖子合上。
48.上述实施例只是为了说明本实用新型的技术构思及特点,其目的是在于让本领域内的普通技术人员能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围。凡是根据本
技术实现要素:
的实质所做出的等效的变化或修饰,都应涵盖在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1