一种PCB板检测用X-RAY检测装置的制作方法
一种pcb板检测用x-ray检测装置
技术领域
1.本技术涉及pcb板检测技术的领域,尤其是涉及一种pcb板检测用x-ray检测装置。
背景技术:
2.pcb,中文名称为印制电路板,它是由电子印刷术制作的,作为电子元器件相互电气连接的载体,是重要的电子部件。pcb之所以能受到越来越广泛的应用,是因为它有很多独特的优点,如:可高密度化、高可靠性、可设计性、可生产性、可测试性、可组装性和可维护性。为保证pcb长期而可靠地工作,需要通过一系列技术手段进行检查和测试。
3.相关技术中,公开号为cn111896564a的中国发明专利申请公开了一种基于x-ray的360度平面3d检测系统及检测方法,其包括机壳,机壳内固定连接有工作台,机壳内设置有x光发射装置和影像接收装置,x光发射装置位于工作台下方,影像接收装置位于工作台上方。将待检测pcb板放置于工作台上,x光发射装置发射x光由影像接收装置进行接收,从而对pcb板进行检测。
4.针对上述相关技术,发明人认为:pcb板放置于工作台上,x光穿过工作台后再穿过pcb板才能进入影像接收装置内,工作台会吸收部分x光,从而导致检测结果准确度不足。
技术实现要素:
5.为了减少工作台对检测结果的影响,提高检测结构准确度,本技术提供一种pcb板检测用x-ray检测装置。
6.本技术提供的一种pcb板检测用x-ray检测装置采用如下的技术方案:
7.一种pcb板检测用x-ray检测装置,包括机壳、x光发射机构和影像接收机构,所述x光发射机构和影像接收机构位于机壳内,所述机壳内设置有载物机构,所述载物机构在竖直方向上位于x光发射机构和影像接收机构之间,所述载物机构包括用于放置pcb板的第一载物架和第二载物架,所述第一载物架和第二载物架间隔设置,pcb板放置于第一载物架和第二载物架之间。
8.通过采用上述技术方案,将pcb板放置于第一载物架与第二载物架之间,检测时调整x光发射机构和影像接收机构对准,x光发射机构发射的x光穿过pcb板进入影像接收机构内,从而进行检测,有效降低对检测结果的影响,提高检测结果准确度。
9.可选的,所述第一载物架朝向第二载物架一侧设置有一组输送组件,pcb板下表面靠近第一载物架一侧与第一载物架上的输送组件抵接,所述第二载物架朝向第一载物架一侧设置有一组输送组件,pcb板下表面靠近第二载物架一侧与第二载物架上的输送组件抵接。
10.通过采用上述技术方案,输送组件对pcb板两侧起支撑作用,从而将pcb板待检测区域露出,方便进行检测。
11.可选的,所述输送组件包括两个皮带轮,两个皮带轮通过输送皮带连接,所述输送皮带输送方向与第二载物架长度方向平行,所述第一载物架和第二载物架上均固定连接有
驱动皮带轮转动的输送电机。
12.通过采用上述技术方案,输送电机启动通过皮带轮驱动输送皮带运行,从而带动放置于输送皮带上的pcb板滑移,调整pcb板位置从而方便对pcb板进行检测。
13.可选的,所述第二载物架朝向第一载物架一侧和第一载物架朝向第二载物架一侧均固定连接有支撑输送皮带上半部分的承载架,所述承载架上表面在竖直方向上的高度小于输送皮带上表面在竖直方向上的高度。
14.通过采用上述技术方案,承载架对输送皮带起支撑作用,从而提高pcb板在输送皮带上的稳定性。
15.可选的,所述第二载物架上固定连接有限位件,当pcb板与限位件抵接时,所述皮带轮停止转动。
16.通过采用上述技术方案,将pcb板输送至合适位置,限位件阻挡pcb板继续滑移,从而使pcb板留置于当前位置,方便进行检测。
17.可选的,所述限位件为接触式传感器,所述接触式传感器固定连接于第二载物架背离第一载物架一侧,所述接触式传感器探头穿入第一载物架和第二载物架之间,当pcb板与接触式传感器探头抵接时,所述皮带轮停止转动。
18.通过采用上述技术方案,pcb板在输送皮带带动下滑移,当pcb板滑移至与接触式传感器探头抵接,此时皮带轮停止转动,从而将pcb板停留于当前位置,操作简单。
19.可选的,所述机壳内固定连接有第二支撑架,所述第一载物架固定连接于第二支撑架上表面,所述第二载物架水平滑动连接于第二支撑架上表面,所述第二支撑架上设置有驱动第二载物架靠近或远离第一载物架的传动组件。
20.通过采用上述技术方案,传动组件驱动第二载物架滑移,第二载物架靠近或者远离第一载物架从而调整第一载物架与第二载物架间距,方便放置不同尺寸的pcb板。
21.可选的,所述第一载物架长度方向水平设置且与第二载物架滑移方向垂直,所述第二载物架长度方向与第一载物架长度方向平行,所述传动组件对应第二载物架长度方向两端设置有两组。
22.通过采用上述技术方案,两组传动组件驱动第二载物架滑移,从而提高载物架滑移过程中的稳定性。
23.可选的,所述传动组件包括转动连接于第一载物架上的驱动丝杠,所述驱动丝杠长度方向与第一载物架长度方向垂直,所述驱动丝杠与第二载物架螺纹连接,所述第二支撑架上固定连接有驱动驱动丝杠转动的驱动电机。
24.通过采用上述技术方案,驱动电机通过驱动丝杠驱动第二载物架滑移,第二载物架滑移调整与第一载物架间距,进而适应不同尺寸的pcb板。
25.综上所述,本技术包括以下至少一种有益技术效果:
26.1.将pcb板放置于第一载物架与第二载物架上的输送皮带上,检测时调整x光发射机构和影像接收机构对准,x光发射机构发射的x光穿过pcb板进入影像接收机构内,从而进行检测,有效降低对检测结果的影响,提高检测结果准确度;
27.2.输送电机启动通过皮带轮驱动输送皮带运行,从而带动放置于输送皮带上的pcb板滑移,调整pcb板位置从而方便对pcb板进行检测,当pcb板滑移至与接触式传感器探头抵接,此时皮带轮停止转动,从而将pcb板停留于当前位置,操作简单;
28.3.驱动电机通过驱动丝杠驱动第二载物架滑移,第二载物架滑移调整与第一载物架间距,进而适应不同尺寸的pcb板。
附图说明
29.图1是本技术实施例整体结构示意图;
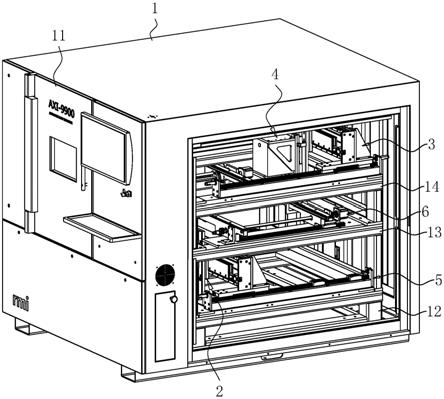
30.图2是本技术实施例部分结构示意图,主要用于展示机壳内部结构;
31.图3是本技术实施例部分结构示意图,主要用于展示x光发射机构、载物机构和影像接收机构位置关系;
32.图4是本技术实施例部分结构示意图,主要用于展示第一支撑架与第一驱动机构位置关系;
33.图5是本技术实施例部分结构示意图,主要用于展示第一驱动机构与x光发射机构位置关系;
34.图6是本技术实施例部分结构示意图,主要用于展示第二支撑架与载物机构位置关系;
35.图7是本技术实施例部分结构示意图,主要用于展示第二载物架及输送组件;
36.图8是图7中a部分的局部放大示意图;
37.图9是图7中b部分的局部放大示意图;
38.图10是本技术实施例部分结构示意图,主要用于展示限位件与第二载物架位置关系;
39.图11是本技术实施例部分结构示意图,主要用于展示第三支撑架与第二驱动机构位置关系;
40.图12是本技术实施例部分结构示意图,主要用于展示第二驱动机构与影像接收机构位置关系。
41.附图标记说明:1、机壳;11、封闭门;12、第一支撑架;13、第二支撑架;14、第三支撑架;2、x光发射机构;21、第一安装架;22、x光发射管;3、第一驱动机构;31、第一x轴驱动组件;311、第一x轴丝杠模组;312、第一支撑板;313、第一支撑臂;314、第一导轨;315、第一支撑块;32、第一驱动气缸;33、第一z轴驱动组件;331、第一安装板;332、第一z轴丝杠模组;4、影像接收机构;41、第二安装架;42、平板探测器;5、第二驱动机构;51、第二x轴驱动组件;511、第二x轴丝杠模组;512、第二支撑板;513、第二支撑臂;514、第二导轨;515、第二支撑块;52、第二驱动气缸;53、第二z轴驱动组件;531、第二安装板;532、第二z轴丝杠模组;6、载物机构;61、第一载物架;62、第二载物架;63、传动组件;631、驱动电机;632、驱动丝杠;64、输送组件;641、皮带轮;642、输送皮带;643、承载架;6431、承载槽;65、限位件;66、输送电机。
具体实施方式
42.以下结合附图1-12对本技术作进一步详细说明。
43.本技术实施例公开一种pcb板检测用x-ray检测装置。参照图1和图2,一种pcb板检测用x-ray检测装置包括机壳1、x光发射机构2、第一驱动机构3、载物机构6、影像接收机构4和第二驱动机构5,x光发射机构2、第一驱动机构3、载物机构6、影像接收机构4和第二驱动
机构5,第一驱动机构3位于载物机构6下方,x光发射机构2设置于第一驱动机构3上,第二驱动机构5位于载物机构6上方,影像接收机构4设置于第二驱动机构5上。
44.将pcb板放置于载物机构6上,第一驱动机构3驱动x光发射机构2调整位置与pcb板对准,第二驱动机构5驱动影像接收机构4调整位置与x光发射机构2对准,x光发射机构2发射x光穿过pcb板进入影像接收机构4内,从而对pcb板进行检测。
45.参照图2和图3,机壳1其中一个竖直侧面上开设有放样口,放样口将机壳1内外连通,机壳1上铰接有用于封闭放样口的封闭门11,封闭门11位于放样口所在的机壳1的竖直侧面上。机壳1内底壁固定连接有第一支撑架12,第一驱动机构3设置于第一支撑架12上,第一支撑架12上表面固定连接有第二支撑架13,载物机构6设置于第二支撑架13上,第二支撑架13上表面固定连接有第三支撑架14,第二驱动机构5设置于第三支撑架14上。
46.参照图4和图5,第一驱动机构3包括设置于第一支撑架12上的第一x轴驱动组件31,第一x轴驱动组件31上设置有第一y轴驱动组件,第一y轴驱动组件上设置有第一z轴驱动组件33。
47.参照图4和图5,第一x轴驱动组件31包括固定连接于第一支撑架12上表面的第一x轴丝杠模组311,第一x轴丝杠模组311的滑块上水平固定连接有第一支撑板312,第一支撑板312上水平固定连接有第一支撑臂313,第一支撑臂313长度方向与第一x轴丝杠模组311长度方向垂直。第一支撑架12上表面水平固定连接有第一导轨314,第一导轨314长度方向与第一x轴丝杠模组311长度方向平行,第一导轨314与第一x轴丝杠模组311间隔设置。第一支撑臂313一端与第一支撑板312固定连接,另一端下表面固定连接有第一支撑块315,第一支撑块315滑动连接于第一导轨314上。第一x轴丝杠模组311为滚珠丝杆型直线模组。
48.参照图2和图5,第一y轴驱动组件包括固定连接于第一支撑臂313朝向封闭门11一侧的两组第一驱动气缸32,第一驱动气缸32为无杆气缸,两组第一驱动气缸32长度方向与第一支撑臂313长度方向平行,两组第一驱动气缸32在竖直方向上间隔设置。
49.参照图4和图5,第一z轴驱动组件33包括固定连接于第一驱动气缸32滑块上的第一安装板331,第一安装板331将两组第一驱动气缸32的滑块连接。第一安装板331背离第一支撑臂313一侧固定连接有第一z轴丝杠模组332,第一z轴丝杠模组332长度方向竖直设置。第一z轴丝杠模组332为滚珠丝杆型直线模组。
50.参照图5,x光发射机构2包括与第一z轴丝杠模组332的滑块固定连接的第一安装架21,第一安装架21上固定连接有x光发射管22,x光发射管22发射端朝上设置。
51.参照图2和图6,载物机构6包括竖直固定连接于第二支撑架13上的第一载物架61,第一载物架61长度方向与第一支撑臂313长度方向平行。第二支撑架13上水平滑动连接有第二载物架62,第二载物架62滑移方向与第一x轴丝杠模组311长度方向平行。第二载物架62竖直设置,第二载物架62长度方向与第一载物架61长度方向平行,第二载物架62位于第一载物架61背离封闭门11一侧。第二载物架62长度方向两端均设置有一组驱动第二载物架62滑移的传动组件63,传动组件63设置于第二支撑架13上表面。第一载物架61和第二载物架62上均设置有一组输送组件64,输送组件64输送方向与第一支撑臂313长度方向平行。第一载物架61和第二载物架62上均固定连接有驱动输送组件64运行的输送电机66。
52.参照图6,传动组件63包括固定连接于第二支撑架13上表面的驱动电机631,驱动电机631位于第二载物架62背离第一载物架61一侧。第一载物架61上转动连接有驱动丝杠
632,驱动丝杠632一端与驱动电机631主轴同轴固定连接,驱动丝杠632与第二载物架62螺纹连接。驱动电机631启动后,驱动丝杠632转动,第二载物架62受驱动丝杠632驱动而发生滑移,从而根据pcb尺寸调整第一载物架61和第二载物架62间距。
53.参照图6,第一载物架61上的输送组件64位于第一载物架61朝向第二载物架62一侧,第二载物架62上的输送组件64位于第二载物架62朝向第一载物架61一侧。
54.参照图7和图8,以第二载物架62上的输送组件64举例说明,第二载物架62上的输送组件64包括转动连接于第二载物架62长度方向两端的皮带轮641,两个皮带轮641通过输送皮带642连接。
55.参照图8和图9,第二载物架62上沿第二载物架62长度方向固定连接有三组承载架643,承载架643上沿第二载物架62长度方向开设有承载槽6431,输送皮带642上半部分的下表面与承载槽6431底壁抵接,承载架643上表面在竖直方向上的高度小于输送皮带642上表面高度。输送电机66固定连接于第二载物架62背离皮带轮641一侧,输送电机66与其中一个皮带轮641同轴固定连接。
56.放置pcb板时,先调整第一载物架61和第二载物架62间距,将pcb板放置于第一载物架61上的输送皮带642以及第二载物架62上的输送皮带642上。输送电机66启动通过输送皮带642带动pcb板滑移从而调整pcb板位置,将pcb板置于机壳1内中间位置方便进行检测。
57.参照图7和图10,第二载物架62上设置有限位件65,限位件65为固定连接于第二载物架62背离第一载物架61一侧的接触式传感器,接触式传感器与输送电机66电连接,接触式传感器的探头从第二载物架62下方绕过进入第二载物架62和第一载物架61之间,接触式传感器的探头远离接触式传感器本体一端竖直朝上设置且高于输送皮带642上表面。pcb板滑移至与接触式传感器的探头抵接,此时输送电机66关闭,皮带轮641停止转动从而使pcb板停滞于当前位置。
58.参照图11,第二驱动机构5包括设置于第三支撑架14上的第二x轴驱动组件51,第二x轴驱动组件51上设置有第二y轴驱动组件,第二y轴驱动组件上设置有第二z轴驱动组件53。
59.参照图11和图12,第二x轴驱动组件51包括固定连接于第三支撑架14上表面的第二x轴丝杠模组511,第二x轴丝杠模组511的滑块上水平固定连接有第二支撑板512,第二支撑板512上水平固定连接有第二支撑臂513,第二支撑臂513长度方向与第二x轴丝杠模组511长度方向垂直。第三支撑架14上表面水平固定连接有第二导轨514,第二导轨514长度方向与第二x轴丝杠模组511长度方向平行,第二导轨514与第二x轴丝杠模组511间隔设置。第二支撑臂513一端与第二支撑板512固定连接,另一端下表面固定连接有第二支撑块515,第二支撑块515滑动连接于第二导轨514上。第二x轴丝杠模组511为滚珠丝杆型直线模组。
60.参照图2、图11和图12,第二y轴驱动组件包括固定连接于第二支撑臂513朝向封闭门11一侧的两组第二驱动气缸52,第二驱动气缸52为无杆气缸,两组第二驱动气缸52长度方向与第二支撑臂513长度方向平行,两组第二驱动气缸52在竖直方向上间隔设置。
61.参照图11和图12,第二z轴驱动组件53包括固定连接于第二驱动气缸52滑块上的第二安装板531,第二安装板531将两组第二驱动气缸52的滑块连接。第二安装板531背离第二支撑臂513一侧固定连接有第二z轴丝杠模组532,第二z轴丝杠模组532长度方向竖直设置。第二z轴丝杠模组532为滚珠丝杆型直线模组。
62.参照图11和图12,影像接收机构4包括固定连接于第二z轴丝杠模组532的滑块上的第二安装架41,第二安装架41上固定连接有平板探测器42。
63.本技术实施例一种pcb板检测用x-ray检测装置的实施原理为:对pcb板进行检测前,先启动驱动电机631,驱动电机631通过驱动丝杠632驱动第二载物架62滑移,第二载物架62滑移从而调整与第一载物架61间距。将pcb板放置于第一载物架61以及第二载物架62上的输送皮带642上,输送电机66启动通过皮带轮641驱动输送皮带642运行,输送皮带642将pcb板输送至与接触式传感器的探头抵接,输送皮带642停止运行。
64.第一驱动机构3调整x光发射管22的位置,第二驱动机构5调整平板探测器42的位置,将x光发射管22与平板探测器42对准,x光发射管22发射x光穿过pcb板进入平板探测器42内,从而进行检测。同步调整x光发射管22和平板探测器42的位置,从而对pcb板各部位进行检测。
65.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1