一种高温粘度测定仪的提升旋转摆动架的制作方法
1.本实用新型属于粘度测定仪的测杆测头提升旋转摆动技术领域,具体涉及一种高温粘度测定仪的提升旋转摆动架。
背景技术:
2.粘度测定仪主要应用于对连铸保护渣的粘度测定中。连铸保护渣的粘度测定原理是:在高于连铸保护渣熔化温度的条件下,将石墨或金属钼测头浸人石墨坩埚盛装的保护渣熔体中,通过扭矩传感器测定测头的转矩大小,确定熔渣粘度。当测头和石墨坩埚的几何条件、测杆尺寸和转速固定时,粘度只与测杆扭角或扭矩即脉冲信号的时间差
△
t成比例,其余参数均归并为常数k,粘度计算公式:,k为仪器常数,δt测杆扭角或扭矩脉冲信号的时间差、单位为s,η为连铸保护渣的粘度值、单位pa
·
s。当测定系统(测杆、测头、转速)固定后,可由已知粘度的标准粘度液标定,通过测定
△
t来计算连铸保护渣的粘度。
3.粘度测定仪用的提升旋转摆动架是用于控制测杆、测头的提升和旋转摆动的控制组件,现有技术中为了提高连铸保护渣粘度测定值的精确度,需要控制测头的插入(浸入)石墨坩埚中的深度,同时为了便于在石墨坩埚中加入被测定样(连铸保护渣),需要将测杆和测头离开石墨坩埚中,此时需要将测杆和测头升起并旋转一定角度。现有技术中用于控制测杆、测头的提升和旋转摆动的控制组件主要存在的技术问题是:1、加热炉和测杆测头分开设置,加热炉设置在提升装置上,测杆和测头只能进行旋转动作,不能上下升降;通过加热炉的升降,使加热炉提升,从而使测杆测头插入到加热炉中进行粘度检测,由于加热炉重量重(加热炉中设置有耐火内衬),加热炉自身的重量重,若使加热炉升降需要相应较大的提升力,造成整个提升旋转摆动架笨重,占用空间大;2、现有的提升旋转摆动架的提升高度和旋转摆动角度无法精确控制,使粘度测定仪设备常数存在误差,影响到连铸保护渣测定粘度的准确性。发明人基于现有技术中的上述缺陷研发了一种高温粘度测定仪的提升旋转摆动架,能够很好地解决现有技术中的上述问题。
技术实现要素:
4.本实用新型为了解决上述技术问题,提供一种高温粘度测定仪的提升旋转摆动架,其设计结构科学合理、自动化程度高,测杆和测头的提升高度、旋转摆动角度可自动控制;本实用新型将提升旋转摆动架与加热炉分离设置,使提升旋转摆动架结构精巧。本实用新型能够解决整个提升旋转摆动架笨重,占用空间大的问题,同时还解决了现有的提升旋转摆动架的提升高度和旋转摆动角度无法精确控制的问题。
5.本实用新型所采用的技术方案是:一种高温粘度测定仪的提升旋转摆动架,包括底座、底部立柱、上部立柱、固定法兰;底座固定设置在底部立柱的底部位置,所述底座的上部固定设置有所述底部立柱,底部立柱的上部固定设置有上部立柱;提升装置的底部固定设置在底部立柱的上端位置,所述提升装置的上部固定设置在上部立柱的上端,并通过固定法兰固定;旋转摆动装置的左侧安装在所述提升装置上,所述旋转摆动装置的右侧套装
在所述上部立柱上;固定板固定设置在所述上部立柱的靠近上部位置,所述固定板的左端固定设置在所述旋转摆动装置的中间位置,固定板的右端上部固定设置有电机安装架二,步进电机三固定设置在所述电机安装架二的中心位置,步进电机三的动力输出轴穿过所述固定板的右端延伸到下部,扭矩传感器固定设置在步进电机三的动力输出轴下部,所述扭矩传感器的下部固定设置有测杆,测杆的下部固定设置有测头,测杆与步进电机三的动力输出轴固定连接。
6.所述提升装置包括电机安装板一,电机安装板一固定设置在所述底部立柱的上端位置,电机安装板一通过固定法兰将其固定在所述底部立柱上;电机安装架一固定设置在电机安装板一的左侧底部位置,步进电机一固定设置在电机安装架一的中间位置,步进电机一的动力输出轴延伸至电机安装板一的上部位置;支撑杆竖直固定设置在电机安装板一的左端上部位置,支撑杆的上部固定设置有顶板,顶板的左端与支撑杆的上部固定连接;提升丝杠的下端与步进电机一的动力输出轴固定连接,提升丝杠的上部穿过顶板固定安装在固定座中,固定座固定设置在顶板的上部靠近左侧位置,丝杠螺母套装在提升丝杠上;上光电传感器固定设置在支撑杆靠近上部右侧位置,下光电传感器固定设置在支撑杆靠近下部右侧位置,光电感应片固定设置在丝杠螺母的后侧左下部位置。
7.所述提升装置底部的电机安装板一固定设置在底部立柱的上端位置,所述提升装置的上部顶板右端固定设置在上部立柱的上端,并通过所述固定法兰固定。
8.所述步进电机一通过连接导线与plc控制程序连接,上光电传感器和下光电传感器通过连接导线与plc控制程序连接。
9.所述上光电传感器和下光电传感器通过固定板固定设置在支撑杆的后部侧面上;上光电传感器和下光电传感器和光电感应片预留有感应间距。
10.所述旋转摆动装置包括中空旋转平台,中空旋转平台的左端安装在丝杠螺母的下部外壁上,中空旋转平台的右端套装在上部立柱上,方形壳体固定设置在中空旋转平台靠近左侧位置,方形壳体为右侧开口的方形空壳;步进电机二固定设置在方形壳体的底部中间位置,步进电机二的动力输出轴延伸至方形壳体的中间位置,锥形驱动齿轮固定设置在步进电机二动力输出轴的上端部,锥形从动齿轮固定设置在中空旋转平台的上部位置,锥形从动齿轮固定安装在所述上部立柱上,锥形驱动齿轮与锥形从动齿轮啮合连接;法兰直线轴承固定设置在固定设置在锥形从动齿轮的上部位置;接近开关座为半圆形结构,接近开关座围绕所述上部立柱与中空旋转平台的右侧底部固定连接;接近开关一固定设置在接近开关座的前端位置,接近开关二固定设置在接近开关座的后侧位置;接近开关感应片固定设置在所述固定板的下部中间位置,接近开关感应片与接近开关座上的接近开关一和接近开关二的位置呈上下对应。
11.所述步进电机二通过连接导线与plc控制程序固定连接,plc控制程序通过预先设置的摆动角度参数控制固定板的摆动角度。
12.所述固定板的左端固定设置在锥形从动齿轮和法兰直线轴承的中间位置,固定板的左端套装在所述上部立柱上,固定板的右端延伸至上部立柱的右侧。
13.所述步进电机三通过连接导线与plc控制程序固定连接,plc控制程序用于控制步进电机三的启停。
14.这种高温粘度测定仪的提升旋转摆动架的使用过程为:一、测杆和测头的升降过
程:首先通过plc控制程序的人机交互界面,启动步进电机一,步进电机一的转动带动提升丝杠转动,利用提升丝杠外螺纹和丝杠螺母的内螺纹的啮合,带动旋转摆动装置的中空旋转平台和固定板向上提升,从而通过固定板的提升带动步进电机三、扭矩传感器、测杆和测头向上提升,当光电感应片提升到上光电传感器的位置时,上光电传感器将感应的光电感应片的模拟信号转换为电信号,并传输给plc控制程序,plc控制程序向步进电机一发送停止控制指令,步进电机一停止,测杆和测头提升到最大限度位置;测杆和测头下降动作过程与上述测杆和测头提升动作相反即可。二、测杆和测头的摆动过程:对连铸保护渣的粘度测定完后,首先将测杆和测头提升,当测杆和测头离开被测定连铸保护渣试样后,通过plc控制程序的人机交互界面,向旋转摆动装置的步进电机二发送控制启动的控制指令,步进电机二开始转动,步进电机二的动力输出轴的转动带动锥形驱动齿轮转动,利用锥形驱动齿轮与锥形从动齿轮的啮合传动,带动锥形从动齿轮转动,在锥形从动齿轮的转动下,带动法兰直线轴承转动,从而最终带动固定板摆动,当固定板摆动到接近开关一的位置时,位于固定板底部的接近开关感应片与接近开关一感应接触,接近开关一将接收的模拟感应信号,转变为感应电信号,传输给plc控制程序,plc控制程序向步进电机二发送停止的控制指令,步进电机二停止转动,从而固定板停止摆动;当接近开关感应片与接近开关二感应接触时,重复上述控制动作即可实现固定板的控制摆动动作;plc控制程序也可通过预定设置的测杆和测头摆动参数,控制步进电机二的旋转角度,从而实现对测杆和测头摆动角度的自动控制。
15.所述提升装置包括电机安装板一,电机安装板一固定设置在所述底部立柱的上端位置,电机安装板一通过固定法兰将其固定在所述底部立柱上;电机安装架一固定设置在电机安装板一的左侧底部位置,步进电机一固定设置在电机安装架一的中间位置,步进电机一的动力输出轴延伸至电机安装板一的上部位置;支撑杆竖直固定设置在电机安装板一的左端上部位置,支撑杆的上部固定设置有顶板,顶板的左端与支撑杆的上部固定连接;提升丝杠的下端与步进电机一的动力输出轴固定连接,提升丝杠的上部穿过顶板固定安装在固定座中,固定座固定设置在顶板的上部靠近左侧位置,丝杠螺母套装在提升丝杠上;上光电传感器固定设置在支撑杆靠近上部右侧位置,下光电传感器固定设置在支撑杆靠近下部右侧位置,光电感应片固定设置在丝杠螺母的后侧左下部位置。这样设置的主要目的是:一方面,通过提升装置的设置实现了固定板、测杆、测头上下位置提升或下降;另一方面,通过提升装置与上光电传感器、下光电传感器、光电感应片和plc控制程序的配合,实现了对测杆和测头升降位置的精确控制,同时实现了测杆和测头位置的自动升降。
16.所述旋转摆动装置包括中空旋转平台,中空旋转平台的左端安装在丝杠螺母的下部外壁上,中空旋转平台的右端套装在上部立柱上,方形壳体固定设置在中空旋转平台靠近左侧位置,方形壳体为右侧开口的方形空壳;步进电机二固定设置在方形壳体的底部中间位置,步进电机二的动力输出轴延伸至方形壳体的中间位置,锥形驱动齿轮固定设置在步进电机二动力输出轴的上端部,锥形从动齿轮固定设置在中空旋转平台的上部位置,锥形从动齿轮固定安装在所述上部立柱上,锥形驱动齿轮与锥形从动齿轮啮合连接;法兰直线轴承固定设置在固定设置在锥形从动齿轮的上部位置;接近开关座为半圆形结构,接近开关座围绕所述上部立柱与中空旋转平台的右侧底部固定连接;接近开关一固定设置在接近开关座的前端位置,接近开关二固定设置在接近开关座的后侧位置;接近开关感应片固
定设置在所述固定板的下部中间位置,接近开关感应片与接近开关座上的接近开关一和接近开关二的位置呈上下对应。这样设置的主要目的是:一方面,通过旋转摆动装置的设置,实现了测杆和测头的前后位置的摆动,另一方面,通过旋转摆动装置与接近开关一、接近开关二、接近开关感应片和plc控制程序的配合,从而实现的测杆和测头摆动角度的控制,同时通过plc控制程序所预先设定的测杆和测头摆动角度参数,可以实现对测杆和测头摆动的自动控制。
17.本实用新型的有益效果:本实用新型提供一种高温粘度测定仪的提升旋转摆动架,其设计结构科学合理、自动化程度高,测杆和测头的提升高度、旋转摆动角度可自动控制;实现了对测杆测头提升高度和旋转摆动角度的精确控制,降低了粘度测定仪设备常数对连铸保护渣粘度测定误差的影响;使提升旋转摆动架结构精巧,占用空间小。
附图说明
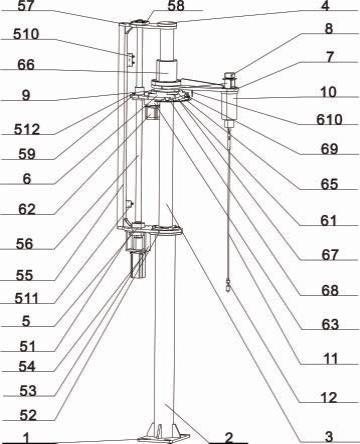
18.图1为本实用新型的结构示意图;
19.图2为本实用新型旋转摆动装置的局部放大图;
20.图3为本实用新型锥形驱动齿轮和锥形从动齿轮之间的内部结构图;
21.图中标记:1、底座,2、底部立柱,3、上部立柱,4、固定法兰,5、提升装置,51、电机安装板一,52、法兰,53、电机安装架一,54、步进电机一,55、支撑杆,56、提升丝杠,57、顶板,58、固定座,59、丝杠螺母,510、上光电传感器,511、下光电传感器,512、光电感应片,6、旋转摆动装置,61、中空旋转平台,62、步进电机二,63、方形壳体,64、锥形驱动齿轮,65、锥形从动齿轮,66、法兰直线轴承,67、接近开关座,68、接近开关一,69、接近开关二,610、接近开关感应片,7、固定板,8、步进电机三,9、电机安装架二,10、扭矩传感器,11、测杆,12、测头。
具体实施方式
22.以下结合附图对本实用新型的具体实施方式做进一步的详细说明。
23.如图所示,本实用新型提供一种高温粘度测定仪的提升旋转摆动架,包括底座1、底部立柱2、上部立柱3、固定法兰4;底座1固定设置在底部立柱2的底部位置,所述底座1的上部固定设置有所述底部立柱2,底部立柱2的上部固定设置有上部立柱3;提升装置5的底部固定设置在底部立柱2的上端位置,所述提升装置5的上部固定设置在上部立柱3的上端,并通过固定法兰4固定;旋转摆动装置6的左侧安装在所述提升装置5上,所述旋转摆动装置6的右侧套装在所述上部立柱3上;固定板7固定设置在所述上部立柱3的靠近上部位置,所述固定板7的左端固定设置在所述旋转摆动装置6的中间位置,固定板7的右端上部固定设置有电机安装架二9,步进电机三8固定设置在所述电机安装架二9的中心位置,步进电机三8的动力输出轴穿过所述固定板7的右端延伸到下部,扭矩传感器10固定设置在步进电机三8的动力输出轴下部,所述扭矩传感器10的下部固定设置有测杆11,测杆11的下部固定设置有测头12,测杆11与步进电机三8的动力输出轴固定连接。
24.所述提升装置5包括电机安装板一51,电机安装板一51固定设置在所述底部立柱2的上端位置,电机安装板一51通过法兰52将其固定在所述底部立柱2上;电机安装架一53固定设置在电机安装板一51的左侧底部位置,步进电机一54固定设置在电机安装架一53的中间位置,步进电机一54的动力输出轴延伸至电机安装板一51的上部位置;支撑杆55竖直固
定设置在电机安装板一51的左端上部位置,支撑杆55的上部固定设置有顶板57,顶板57的左端与支撑杆55的上部固定连接;提升丝杠56的下端与步进电机一54的动力输出轴固定连接,提升丝杠56的上部穿过顶板57固定安装在固定座58中,固定座58固定设置在顶板57的上部靠近左侧位置,丝杠螺母59套装在提升丝杠55上;上光电传感器510固定设置在支撑杆55靠近上部右侧位置,下光电传感器511固定设置在支撑杆55靠近下部右侧位置,光电感应片512固定设置在丝杠螺母59的后侧左下部位置。
25.所述提升装置5底部的电机安装板一51固定设置在底部立柱2的上端位置,所述提升装置5的上部顶板57右端固定设置在上部立柱3的上端,并通过所述固定法兰4固定。
26.所述步进电机一54通过连接导线与plc控制程序连接,上光电传感器510和下光电传感器511通过连接导线与plc控制程序连接。
27.所述上光电传感器510和下光电传感器511通过固定板7固定设置在支撑杆55的后部侧面上;上光电传感器510和下光电传感器511和光电感应片512预留有感应间距。
28.所述旋转摆动装置6包括中空旋转平台61,中空旋转平台61的左端安装在丝杠螺母59的下部外壁上,中空旋转平台61的右端套装在上部立柱3上,方形壳体63固定设置在中空旋转平台61靠近左侧位置,方形壳体63为右侧开口的方形空壳;步进电机二62固定设置在方形壳体63的底部中间位置,步进电机二62的动力输出轴延伸至方形壳体63的中间位置,锥形驱动齿轮64固定设置在步进电机二62动力输出轴的上端部,锥形从动齿轮65固定设置在中空旋转平台61的上部位置,锥形从动齿轮65固定安装在所述上部立柱3上,锥形驱动齿轮64与锥形从动齿轮65啮合连接;法兰直线轴承66固定设置在固定设置在锥形从动齿轮65的上部位置;接近开关座67为半圆形结构,接近开关座67围绕所述上部立柱3与中空旋转平台61的右侧底部固定连接;接近开关一68固定设置在接近开关座67的前端位置,接近开关二69固定设置在接近开关座67的后侧位置;接近开关感应片610固定设置在所述固定板7的下部中间位置,接近开关感应片610与接近开关座67上的接近开关一68和接近开关二69的位置呈上下对应。
29.所述步进电机二62通过连接导线与plc控制程序固定连接,plc控制程序通过预先设置的摆动角度参数控制固定板7的摆动角度。
30.所述固定板7的左端固定设置在锥形从动齿轮65和法兰直线轴承66的中间位置,固定板7的左端套装在所述上部立柱3上,固定板7的右端延伸至上部立柱3的右侧。
31.所述步进电机三8通过连接导线与plc控制程序固定连接,plc控制程序用于控制步进电机三8的启停。
32.这种高温粘度测定仪的提升旋转摆动架的使用过程为:一、测杆和测头的升降过程:首先通过plc控制程序的人机交互界面,启动步进电机一54,步进电机一54的转动带动提升丝杠56转动,利用提升丝杠56外螺纹和丝杠螺母59的内螺纹的啮合,带动旋转摆动装置6的中空旋转平台61和固定板7向上提升,从而通过固定板7的提升带动步进电机三8、扭矩传感器10、测杆11和测头12向上提升,当光电感应片512提升到上光电传感器510的位置时,上光电传感器510将感应的光电感应片512的模拟信号转换为电信号,并传输给plc控制程序,plc控制程序向步进电机一54发送停止控制指令,步进电机一54停止,测杆11和测头12提升到最大限度位置;测杆11和测头12下降动作过程与上述测杆11和测头12提升动作相反即可。二、测杆和测头的摆动过程:对连铸保护渣的粘度测定完后,首先将测杆11和测头
12提升,当测杆11和测头12离开被测定连铸保护渣试样后,通过plc控制程序的人机交互界面,向旋转摆动装置6的步进电机二62发送控制启动的控制指令,步进电机二62开始转动,步进电机二62的动力输出轴的转动带动锥形驱动齿轮64转动,利用锥形驱动齿轮64与锥形从动齿轮65的啮合传动,带动锥形从动齿轮65转动,在锥形从动齿轮65的转动下,带动法兰直线轴承66转动,从而最终带动固定板7摆动,当固定板7摆动到接近开关一68的位置时,位于固定板7底部的接近开关感应片610与接近开关一68感应接触,接近开关一68将接收的模拟感应信号,转变为感应电信号,传输给plc控制程序,plc控制程序向步进电机二62发送停止的控制指令,步进电机二62停止转动,从而固定板7停止摆动;当接近开关感应片610与接近开关二69感应接触时,重复上述控制动作即可实现固定板7的控制摆动动作;plc控制程序也可通过预定设置的测杆11和测头12摆动参数,控制步进电机二62的旋转角度,从而实现对测杆11和测头12摆动角度的自动控制。
33.对上述实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1