一种激光测距传感器精度检验装置的制作方法
1.本实用新型涉及一种激光测距传感器精度检验装置,属于测量技术领域。
背景技术:
2.激光测距传感器是一种非接触式的测量方式,具有测量范围广、响应速度快、远距离测量无需反光板、测量精度高量程大等优点。其已经广泛的应用在了各领域中,例如工业机器人和协作机器人的标定过程中采用激光测距传感器作为测量仪器。
3.目前激光测距传感器采用光速和电子技术组合的方式来计算激光束长度,计算出来的激光束长度存在误差。不同的测量活动对测量仪器的精度要求是不同的,同时激光测距传感器的测量精度是其本身一个重要指标。所以对激光测距传感器进行精度检验,获取其实际激光束长度是有意义的。
技术实现要素:
4.本实用新型提供了一种激光测距传感器精度检验装置,以用于构建用于激光测距传感器精度检验的平台,进一步以获得激光测距传感器精度检验的误差数据。
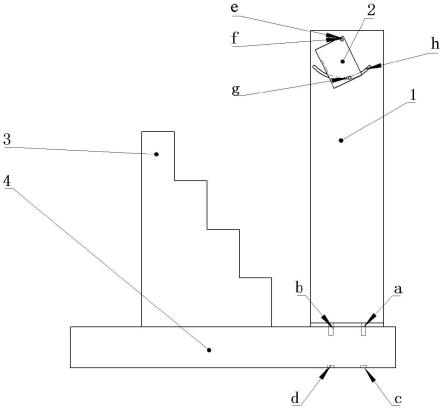
5.本实用新型的技术方案是:一种激光测距传感器精度检验装置,包括支撑架1、激光测距传感器2、阶梯块3、基座4;其中,基座4上一侧固定支撑架1,基座4上另一侧放置阶梯块3,激光测距传感器2安装在支撑架1上且激光测距传感器2激光束的方向朝向阶梯块3一侧。
6.所述支撑架1上设有基准孔e、圆弧孔h;基准孔e、圆弧孔h分别与激光测距传感器2上的基准孔f、基准孔g连接使激光测距传感器2朝向阶梯块3一侧射出激光束。
7.所述圆弧孔h以基准孔e的圆心为圆心。
8.所述阶梯块3的层数大于10层。
9.所述阶梯块3的踏面为水平面,水平面的平面度高于0.01mm。
10.本实用新型的有益效果是:本实用新型通过巧妙的结构搭建了用于激光测距传感器精度检验的平台,通过该平台可以用于激光测距传感器精度检验,具有操作简单、成本低廉的优点;结合本实用新型的方法,可以获得激光测距传感器精度检验的误差数据,通过观测误差值的大小就可进行激光测距传感器的精度检验。
附图说明
11.图1是本实用新型的装置图;
12.图2是本实用新型激光测距传感器精度检验原理图;
13.图中各标号为:1-支撑架、2-激光测距传感器、3-阶梯块、4-基座。
具体实施方式
14.下面结合附图和实施例,对实用新型做进一步的说明,但本实用新型的内容并不
限于所述范围。
15.实施例1:如图1所示,一种激光测距传感器精度检验装置,包括支撑架1、激光测距传感器2、阶梯块3、基座4;其中,基座4上一侧固定支撑架1,基座4上另一侧放置阶梯块3,激光测距传感器2安装在支撑架1上且激光测距传感器2激光束的方向朝向阶梯块3一侧。
16.进一步地,可以设置所述支撑架1上设有基准孔e、圆弧孔h;基准孔e、圆弧孔h分别与激光测距传感器2上的基准孔f、基准孔g通过螺栓连接使激光测距传感器2朝向阶梯块3一侧射出激光束。
17.进一步地,可以设置所述圆弧孔h以基准孔e的圆心为圆心。
18.进一步地,可以设置所述阶梯块3的层数大于10层。
19.进一步地,可以设置所述阶梯块3的踏面为水平面,水平面的平面度高于0.01mm。
20.具体而言,以激光测距传感器采用的是基恩士ia-100为例,将支撑架1上的基准孔a、基准孔b分别与基座4上的基准孔c、基准孔d采用螺栓连接实现同轴心配合,支撑架1上的基准孔e、圆弧孔h分别与激光测距传感器2上的基准孔f、基准孔g通过螺栓连接使激光测距传感器保持固定角度向斜下方打出激光束;上述基准孔f、基准孔g为激光测距传感器自带的为2-φ3.2的基准孔,其中基准孔f、基准孔g水平间距为11.7mm、竖直间距为46.1mm;所述圆弧孔h为以e的圆点为圆心画的圆上的圆弧、槽宽为3.2mm,基准孔e为半径3.2mm的基准孔。所述阶梯层可按照实际需求设定、大于10层,且层高为10mm,阶梯水平面的平面度高于0.01mm。基座可以选用大理石台。
21.本实用新型可以通过如下步骤进行使用:
22.步骤1:打开激光测距传感器精度检验装置中的激光测距传感器2,激光测距传感器2从o点出射激光束;其中,o点为激光测距传感器激光束出射点;
23.步骤2:通过拖动阶梯块使激光束射在阶梯块3不同阶梯的水平面上,并使用基于串口通讯的上位机记录相应激光测距传感器的长度读数;
24.如果射在阶梯块3第i级阶梯的水平面,则射在第i级阶梯水平面的激光束与竖直方向的夹角θi为:
[0025][0026]
其中,ai表示射在第i级阶梯水平面的激光束的点,ai'表示与ai在同一水平直线上的点;i=1,2,...,n-1,n表示顶层;a1,a2,,...,an与o点在一条直线上,a1',a2',...,an'与o点在一条竖直方向直线上;表示激光测距传感器2读取的射在i级阶梯水平面的激光束oai的长度与激光测距传感器2读取的射在i+1级阶梯水平面的激光束oa
i+1
的长度的差值;表示线段a
i+1
'ai'的长度且为对应第i级阶梯的高度;
[0027]
以图2示意的4级阶梯进行说明,由几何关系可以得出∠a
n-1an
p=θ
n-1
;其中oan与oa
n-1
的长度已知,oan为激光束射在阶梯块最顶层n阶梯水平面时激光测距传感器的读数,oa
n-1
为激光束射在第n-1层阶梯水平面时激光测距传感器的读数,则由几何关系可知a
nan-1
的长度等于oa
n-1
的长度减去oan的长度。由于直线an'a
n-1
'平行于直线anp,又可知an'a
n-1
'的长度为阶梯块的阶梯高度,则根据反余弦定理可计算出射在第n级阶梯的水平面激光束与
竖直方向的夹角θn的大小,计算公式如下:
[0028][0029]
其中,表示线段an'a
n-1
'和a
nan-1
的长度。
[0030]
步骤3:根据统计的n-1个不同阶梯水平面的激光束与竖直方向的夹角θi,计算平均值,将平均值作为最优夹角θ
best
;本实用新型取n-1个激光束与竖直方向上夹角的算术平均值θ
average
为最优夹角θ
best
,可以降低实际计算θi带来的微小误差,使得后续计算的oan'理论值更接近真实值,同时上述获取最优夹角的方法具有操作便捷、效率高和成本低等特点。
[0031]
步骤4:根据最优夹角θ
best
和激光测距传感器2读取的射在n级阶梯水平面的激光束oan的长度进而使用余弦定理得到oan'的理论长度计算公式如下:
[0032][0033]
步骤5:根据步骤4得到的建立激光束长度数学模型,计算出激光束理论长度,激光束理论长度计算公式如下:
[0034]
l
rj
=hj/cosθ
best
[0035]
其中,l
rj
表示计算的从o点射在第j级阶梯水平面的激光束oaj的理论长度;表示o点至被测第j级阶梯水平面的竖直高度,h表示阶梯的高度且每级阶梯高度一致,n表示阶梯总数,j=1,2,...,n;l
rj
取决于激光测距传感器的布置,hj取决于阶梯面的层数;
[0036]
步骤6:将根据步骤5获得的激光束理论长度与通过激光测距传感器2的读数进行求差,获得激光束的长度误差,计算公式如下:
[0037]
errorj=l
rj-lj[0038]
其中,errorj表示l
rj
与激光测距传感器2读取的从o点射在第j级阶梯水平面的激光束的读数lj之间的差值。
[0039]
在得到θ
best
后,需要进一步确定线段oan的长度用于计算oan'以便后续数学模型的推导,而本实用新型将最优夹角θ
best
与长度误差小的oan用于计算oan',使得oan'的理论长度值无限接近真实值。其中,因为an点为激光测距传感器的量程下限,此处长度误差小、误差可以忽略不计,因此可以用oan的长度读数值代替其真实值。通过观测误差值的大小就可进行激光测距传感器的精度检验。
[0040]
上面结合附图对本实用新型的具体实施方式作了详细说明,但是本实用新型并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1