旋转角传感器的校正方法与流程
1.本发明涉及对电动马达的马达轴的旋转角进行检测的旋转角传感器的校正方法。
背景技术:
2.通常,在使用三相无刷式电动马达辅助操舵力、使用电动马达自动地进行操舵的转向装置中,在操舵轴(例如齿条)连结有利用电动马达驱动的滚珠丝杠机构。成为电动马达的旋转力从设置于电动马达的驱动轴的马达侧带轮经由带向与螺母一体地旋转的螺母侧带轮传递的构成。
3.此外,除此之外,三相无刷式电动马达作为在内燃机的冷却系统中压送制冷剂的电动水泵的驱动源、组装于自动变速器用的液压泵系统的电动油泵的驱动源等各种车载用致动器的驱动源来使用。
4.因此,以下说明的本发明,能够适用于各种用途的三相无刷式电动马达。
5.在这样的三相无刷式电动马达中,使用旋转角传感器检测马达轴的旋转角,基于该旋转角控制对电动马达的定子线圈给与的电流。并且,该旋转角传感器在制造工序、组装工序中,发生由马达轴的偏心、磁化强度的不均等导致的旋转角误差。若该旋转角误差发生,则会产生马达转矩变动这样的不利影响。
6.为了消除这样的旋转角误差的影响,需要旋转角传感器的校正作业(校准),例如已知日本特开2007-64771号公报(专利文献1)记载的方法。
7.在该专利文献1中示出了通过将应该检测的旋转角的基准值(真值)与利用旋转角传感器检测到的检测值之间的旋转角误差进行高速傅里叶变换(fft:fast fourier transform)而求出预定阶数的频率成分,将该旋转角误差的频率成分进行逆高速傅里叶变换(ifft:inverse fast fourier transform)变换为角度误差而计算补正值,将计算出的补正值反映于利用旋转角传感器检测到的检测值,从而补偿旋转角误差。
8.现有技术文献
9.专利文献
10.专利文献1:日本特开2007-64771号公报
技术实现要素:
11.发明所要解决的技术问题
12.在专利文献1记载的方法中,为了求出旋转角误差,通过使预定电流向定子线圈流动而进行励磁,使马达转子旋转至预定的旋转角度并检测旋转角,根据该检测到的检测值和此时的旋转角的基准值(真值)求出旋转角误差。
13.然而,若设为使用所有三相线圈使马达转子旋转,则存在马达转子无法精度良好地在预定的计划的旋转停止位置停止这一现象。因而,产生只能输出不准确的检测值,难以求出高速傅里叶变换所需的准确的旋转角误差这一课题。
14.并且,要精度良好地在预定的旋转停止位置停止,需要外置伺服机构等,需要进行
额外的设备投资,从制造上的观点来看不利。
15.用于解决技术问题的技术方案
16.本发明的目的在于,提供一种新颖的旋转角传感器的校正方法,能够尽可能地减少额外的设备投资,而且能够精度良好地使马达转子停止于预定的旋转停止位置。
17.本发明一个实施方式的旋转角传感器的校正方法是电动马达的旋转角传感器的校正方法,其特征在于,电动马达具备:定子线圈,其包含u相、v相及w相的三相线圈;马达转子,通过定子线圈的励磁而旋转;马达轴,与马达转子一体地旋转;旋转角传感器,检测马达轴的旋转位置,
18.该校正方法具有:
19.励磁工序,其包含通过对定子线圈的三相线圈中的预定的一相线圈或预定的两相线圈即第一组线圈进行励磁而使马达轴旋转到第一旋转停止位置的工序、和通过对与预定的一相线圈不同的线圈或与第一组线圈不同的第二组线圈进行励磁而使马达轴旋转到第二旋转停止位置的工序;
20.旋转位置检测工序,其包含取得第一旋转停止位置处的旋转角传感器的检测值的工序、和取得第二旋转停止位置处的旋转角传感器的检测值的工序;
21.传感器误差补正参数生成工序,其根据通过旋转位置检测工序得到的旋转角传感器的检测值,生成用于补正对电动马达进行驱动控制时的旋转角传感器的检测值的传感器误差补正参数。
22.根据本发明一个实施方式的旋转角传感器的校正方法,在使马达转子旋转到预定的旋转停止位置时,对定子线圈的三相线圈中的预定的一相线圈或预定的两相线圈即第一组线圈进行励磁。通过依次切换该励磁的线圈,能够精度良好地使马达转子在预定的旋转停止位置停止。
23.该旋转停止位置由励磁的线圈的相决定,再现性非常高,换言之,即便多次进行励磁工序,也能够使马达转子停止于几乎相同的旋转停止位置。
24.这样,通过使用在再现性高的马达转子的旋转停止位置处检测到的旋转角传感器的检测值生成传感器误差补正参数,能够得到精度高的旋转角传感器的补正值。
附图说明
25.图1是从车辆前方侧观察电动助力转向装置得到的主视图。
26.图2是图1所示的辅助机构的剖视图。
27.图3是图2的辅助机构的旋转角传感器附近的主要部分放大图。
28.图4是电动马达的控制装置的构成图。
29.图5是说明旋转角传感器的误差的说明图。
30.图6是说明旋转角传感器的误差的频率成分的说明图。
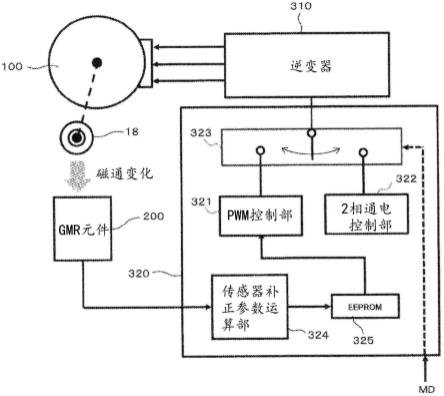
31.图7是说明本发明的实施方式的旋转传感器的校正方法的构成图。
32.图8是示出旋转传感器的检测角度的说明图。
33.图9是说明在工厂出货前的电动助力转向装置进行的旋转角传感器的校正方法的流程图。
34.图10是说明补正实际的旋转角传感器的检测值的控制的流程图。
具体实施方式
35.以下,使用附图,对本发明的实施方式进行详细说明,但本发明不限定于以下的实施方式,在本发明的技术上的概念中各种变形例、应用例也包含于其范围。
36.此外,以下说明的实施方式示出了电动助力转向装置的例子,但如上述那样也能够适用于其他适用产品,所以不限定于电动助力转向装置。
37.图1是从汽车的前方侧观察电动助力转向装置得到的图,图2是示出图1的辅助机构附近的剖面的图。
38.在图1、图2中,电动助力转向装置1具有操舵机构2及辅助机构3。操舵机构2将驾驶员旋转操作的转向盘的旋转向使前轮(操舵轮)转舵的操舵轴(以下,齿条)4传递。操舵机构2具有与转向盘连结的转向轴2a及与齿条4的条啮合的小齿轮轴(未图示)。
39.转向轴2a与小齿轮轴利用扭杆连结。辅助机构3对齿条4赋予用于减轻驾驶员的操舵负荷的辅助力。操舵机构2及辅助机构3收纳于具有齿条收纳部5a及减速机构收纳部5b的壳体5的内部。
40.齿条收纳部5a将齿条4以能够在轴向上移动的方式收纳。减速机构收纳部5b配置于齿条收纳部5a的轴向中间部,收纳后述的减速机构。
41.如图2所示,辅助机构3具有电动马达6及滚珠丝杠机构7。电动马达6根据扭杆转矩(操舵转矩)、车速等由未图示的控制器控制输出。滚珠丝杠机构7将电动马达6的旋转运动变换为直线运动并向齿条4传递。
42.电动马达6收纳于固定在减速机构收纳部5b的马达壳体6h的内部,主要由定子线圈、马达转子、马达轴及支承马达轴的轴承等构成。
43.在电动马达6设置有旋转角传感器,旋转角传感器包括传感器磁体和检测元件。并且,传感器磁体设置于马达轴,检测元件设置于能够检测到传感器磁体产生的磁场的变化的位置。
44.上述的电动马达6是三相无刷马达,狭槽的数设为n个。在后述的“励磁工序”中,能够使马达轴旋转到n个旋转停止位置或n个的2倍的旋转停止位置。
45.并且,在本实施方式中,狭槽的数设定为12个,在后述的校正方法的“励磁工序”中,使马达轴旋转到狭槽数的2倍的24处旋转停止位置。也就是说,针对马达轴的旋转1圈,检测24处旋转停止位置处的旋转角。
46.其理由在于,在狭槽数为12个的三相无刷马达中,通过以能够进行马达轴的旋转停止控制的最大数测定旋转角传感器的旋转角,能够生成更高精度的传感器误差补正参数。
47.返回图2,滚珠丝杠机构7具有螺母8及螺母侧带轮9。螺母侧带轮9形成为包围螺母8的圆筒形状。螺母侧带轮9通过作为固定部的4个固定螺栓紧固于螺母8。螺母侧带轮9以减轻重量为目的而由合成树脂制作。
48.在电动马达6的马达轴6a固定有圆筒状的马达侧带轮11。马达侧带轮11相对于螺母主体部的旋转轴线在径向上偏移配置,具有形成为筒状的马达带轮卷挂部,由电动马达6旋转驱动。并且,在螺母侧带轮9及马达侧带轮11间,卷绕有带(传递部件)12。螺母侧带轮9的外径形成为比马达侧带轮11的外径大。
49.因而,马达侧带轮11、带12及螺母侧带轮9作为电动马达6的减速机构发挥作用。马
达侧带轮11、带12及螺母侧带轮9收纳于减速机构收纳部5b的内部。
50.螺母8形成为包围齿条4的圆筒状。螺母8由滚珠轴承19支承为相对于壳体5旋转自如。在螺母8的内周,形成有螺旋状的螺母侧滚珠丝杠槽13。另一方面,在齿条4的外周,形成有螺旋状的齿条侧滚珠丝杠槽14。
51.由螺母侧滚珠丝杠槽13及齿条侧滚珠丝杠槽14构成滚珠循环槽15。在滚珠循环槽15内,填充有多个金属制的滚珠16。滚珠丝杠机构7通过伴随于螺母8的旋转而滚珠16在滚珠循环槽15内移动,齿条4相对于螺母8在轴向上移动。
52.图3示出了设置于马达侧带轮11的相反侧的马达轴6a的顶端附近的旋转角传感器17的附近的放大剖面。旋转角传感器17由设置于电动马达6的马达轴6a的顶端的传感器磁体18和设置于控制基板19上的与传感器磁体18相对的位置的磁传感器(gmr传感器)20构成。在控制基板19之上载置有控制/驱动电路21。
53.磁传感器20检测传感器磁体18与马达轴6a一起旋转时的磁场的变化,作为马达转子的旋转角(=马达轴旋转角)向后述的控制单元输出。
54.磁传感器20只要相对于磁体罩22处于控制部壳体23侧即可,但根据情况,磁传感器20也可以设置于马达壳体24内。此外,马达壳体24相当于图2的马达壳体6h。
55.马达轴6a的控制部壳体23侧的端部贯通马达壳体24的轴插入孔25,位于控制部壳体23内。马达轴6a由轴承26旋转自如地枢轴支承于马达壳体24。
56.传感器磁体18经由磁体支架27保持于马达轴6a的顶端(位于控制部壳体23内的部分)。磁体支架27被传感器磁体18压入,并且被马达轴6a的顶端部压入。传感器磁体18在绕马达轴6a的旋转轴方向上被磁化了预定数的n极和s极。
57.传感器磁体18立起设置有从圆盘状的部件的中央部附近延伸的压入部,该压入部压入磁体支架27。传感器磁体18在由磁体支架27保持着的状态下,与磁传感器20相对的面以外的面由磁体支架27包围。因而,传感器磁体18通过磁体支架27遮挡来自外部的磁场。
58.接着,基于图4对电动马达的驱动电路进行说明。三相无刷式电动马达(对应于图2中的电动马达6)100具有:定子110,其具备三相线圈110u、110v、110w;马达转子120,其被支承为能够相对于定子110旋转。此外,马达转子120如周知那样固定有马达轴6a。(参照图2)在定子110中,u相线圈110u通过三个线圈片u1、u2、u3并联连接(或串联连接)而构成,v相线圈110v通过三个线圈片v1、v2、v3并联连接(或串联连接)而构成,w相线圈110w通过三个线圈片w1、w2、w3并联连接(或串联连接)而构成。
59.u相线圈110u的一端tua、v相线圈110v的一端tva及w相线圈110w的一端twa与控制器300连接,u相线圈110u的另一端tub、v相线圈110v的另一端tvb及w相线圈110w的另一端twb在中性点n进行y接线(星型接线)。
60.另外,磁传感器(对应于图3中的磁传感器20)200是检测马达转子120的旋转角的旋转角传感器,也是检测图3所示的马达轴6a中的传感器磁体18的磁极位置的磁极位置检测传感器。磁传感器200的检测信号(旋转角)向控制器300输入。
61.控制器300具备逆变器310和控制单元320。逆变器310具备上臂侧的开关元件311a及下臂侧的开关元件311b串联连接而成的u相臂、上臂侧的开关元件311c及下臂侧的开关元件311d串联连接而成的v相臂、以及上臂侧的开关元件311e及下臂侧的开关元件311f串联连接而成的w相臂。
62.逆变器310所具备的各臂并联连接于车载的直流电源ps的正极线l1与直流电源ps的负极线l2之间,形成了三相桥电路。开关元件311a~311f分别包含反并联的二极管d,例如由fet(field effect transistor)或igbt(insulated gate bipolar transistor)等功率半导体元件构成。
63.另外,逆变器310具备用于检测相电流的电流检测手段。在本例中,输出相当于u相电流的电流检测信号iu的分流电阻312u介装于u相臂中的负极线l2侧,输出相当于v相电流的电流检测信号iv的分流电阻312v介装于v相臂中的负极线l2侧,输出相当于w相电流的电流检测信号iw的分流电阻312w介装于w相臂的负极线l2侧。分流电阻312u、312v、312w分别将其两端电位差作为相当于各相电流的电流检测信号iu、iv、iw向控制单元320输出。
64.控制单元320具备构成为在与外部的控制装置之间经由can(controller area network)等进行通信,并且具有a/d变换器、cpu(central processing unit)等处理器、ram(random access memory)等能够写入的存储器、rom(read only memory)等读出专用的存储器等的微型计算机。
65.在微型计算机,连接有输入电路、输出电路,向输入电路输入各种传感器的检测信号,从输出电路向逆变器310的功率半导体输出控制信号。此外,虽然后述,但向输入电路输入模式切换信号md,在进行旋转角传感器17的校正时,由作业者人为地输入。若输入该模式切换信号md则进行校正处理,但关于这一点后述。
66.控制单元320输入从检测马达转子120的旋转角度的旋转角传感器17输出的旋转角信号、从分流电阻312u、312v、312w输出的电流检测信号iu、iv、iw、以及从外部的控制装置发送的目标旋转速度ω*的信号,基于这些输入信号,向逆变器310输出控制信号。
67.在以上那样的构成的电动马达中,接着,对成为本实施方式的旋转角传感器17的校正方法进行说明。
68.如上述那样,在三相无刷式电动马达100中,使用旋转角传感器17检测马达轴6a(参照图2)的旋转角来控制对电动马达100的定子线圈给与的电流。并且,该旋转角传感器17在制造工序、组装工序中,发生由马达轴6a的偏心、传感器磁体18(参照图3)的磁化强度的不均等导致的旋转角误差。当然,也会因除此以外的原因而发生旋转角误差,这一点自不必说。
69.因而,如图5所示,当向u相~w相的三相线圈供给电流而进行线圈的励磁时,马达转子120的旋转通过马达轴6a(参照图2)而利用旋转角传感器17来检测。然而,因上述的马达轴6a的偏心、传感器磁体18的磁化强度的不均等原因,往往会发生旋转角传感器17的检测值与基准值(真值)不同的现象。若发生该旋转角误差,则会产生马达转矩变动这样的不利影响。此外,检测值会发生偏离,但以下忽视偏离来推进说明。
70.为了消除这样的旋转角误差的影响,通过将旋转角的基准值(真值)与利用旋转角传感器17检测到的检测值之间的旋转角误差进行高速傅里叶变换而求出预定阶数的频率成分,将该旋转角误差的频率成分进行逆高速傅里叶变换变换为角度误差而求出补正值,将求出的补正值反映于利用旋转角传感器17检测到的检测值,从而补偿旋转角误差是有效的。
71.图6示出了将利用旋转角传感器17检测到的检测值与旋转角的基准值(真值)的旋转角误差进行离散傅里叶变换后的状态。若进行离散傅里叶变换,则旋转角误差能够利用
预定的阶数的三角函数来表示。在图6中示出了1阶误差成分~4阶误差成分。此外,该阶数是任意的,只要是能够确保预定精度的阶数即可,但在本实施方式中将到4阶成分为止作为运算的对象。
72.并且,在将预定的旋转停止位置的旋转角误差设为“δθ”时,若将预定的旋转停止位置的基准值(角度)设为“x”,将各阶数的频率成分的振幅设为“am1,am2,
…
,amn”,将各阶数的频率成分的相位设为“ph1,ph2,
…
,phn”,则旋转角误差“δθ”能够如式(1)那样表示。此外,“n”是阶数。
73.δθ=am1*sin(x+ph1)+am2*sin(2*x+ph2)+
…
+amn*sin(n*x+phn)
……
(1)
74.此外,用于求出式(1)的旋转角误差的基准值(x),可以使用对角度误差进行了补偿的基准旋转角传感器来求出。此外,在本实施方式中,预先将在标准的基准旋转角传感器中不产生旋转角误差的基准角设为真值,存储于rom等存储元件。
75.例如,将马达转子120每旋转1圈的基准值(x)作为图5的细的虚线所示的基准值而存储。在本实施方式中,马达转子120每旋转1圈,求出24处旋转角误差,所以,按每360
°
/24(=15
°
)的角度存储了基准值。另外,旋转角传感器的基准值也可以将对误差进行了补偿的基准旋转角传感器安装于马达轴6a,与进行校正的旋转传感器同时使用来测定。
76.并且,当通过对式(1)的旋转角误差实施高速傅里叶变换处理,求出n阶的频率成分后,在将旋转停止位置的旋转角误差设为“δθ”时,若将旋转停止位置的基准值(角度)设为“x”,将各阶数的正弦波成分的振幅设为“am1s,am2s,
…
,amns”,将各阶数的余弦波成分的振幅设为“am1c,am2c,
…
,amnc”,则旋转角误差“δθ”能够如式(2)那样表示。此外,“n”是阶数。
77.δθ=am1s*sin(x)+am1c*cos(x)+am2s*sin(2*x)+am2c*cos(2*x)+
…
+amns*sin(n*x)+amnc*cos(n*x)
……
(2)
78.因此,若按每个阶数存储旋转角误差的正弦波成分的振幅(amns)、旋转角误差的余弦波成分的振幅(amnc)及相位(phn),则能够补偿实际的控制中的、通过旋转角传感器17检测旋转角时的旋转角误差。此外,在如上述那样利用式(2)表示旋转角误差的情况下,无需存储全部的频率成分,只要存储到足以得到所需精度的阶数为止即可。
79.例如,在存储到4阶成分为止的情况下,根据式(2)能够制成如下的表。在本实施方式中,作为表使用了eeprom。
80.{am1s,am1c,am2s,am2c,
……
,am4s,am4c}
……
(3)
81.这些是用于补偿旋转角误差的传感器误差补正参数,在实际的旋转角的补正值运算中使用而求出补正值。
82.在此,为了生成旋转角传感器17的传感器误差补正参数,通过设为使用上述的运算式将旋转角传感器17的检测值的误差代入于该运算式的方式,与使用映射存储误差的情况相比,能够减少运算负荷、内存数。
83.以上示出了用于求出用于对旋转角误差进行校正的传感器误差补正参数的基本的运算,但实际上马达转子120的旋转停止位置不准确,因而检测值不均,存在无法得到准确的旋转角误差这一课题。因而,在本实施方式中,如以下这样,进行旋转角传感器17的校正。
84.图7示出了用于按每个电动马达进行旋转角误差的校正的构成。电动马达100的转
子马达120的旋转通过旋转角传感器17检测。这同以往。并且,在本实施方式中,控制单元320具备通常的pwm控制部321、两相通电控制部322及模式切换部323。
85.在pwm控制部321中,首先,将相当于电流检测信号iu、iv、iw的各相的实际的电流值通过预定的运算式进行坐标变换,运算d轴的实际的电流值即d轴实际电流值id及q轴的实际的电流值即q轴实际电流值iq。
86.接着,基于实际的旋转速度ω和从外部的控制装置发送的目标旋转速度ω*,运算d轴目标电流值id*及q轴目标电流值iq*。具体地说,通过参照针对实际的旋转速度ω与目标旋转速度ω*的偏差预先设定了d轴目标电流值id*及q轴目标电流值iq*的数据表来运算d轴目标电流值id*及q轴目标电流值iq*。
87.接着,基于d轴实际电流值id及q轴实际电流值iq和d轴目标电流值id*及q轴目标电流值iq*,运算应该对电动马达100施加的端子电压的d轴成分即d轴施加电压指令值vd*及该端子电压的q轴成分即q轴施加电压指令值vq*。
88.接着,将d轴施加电压指令值vd*及q轴施加电压指令值vq*通过预定的运算式进行坐标变换,运算应该对u相线圈110u施加的端子电压即u相施加电压指令值vu*、应该对v相线圈110v施加的端子电压即v相施加电压指令值vv*、以及应该对w相线圈110w施加的端子电压即w相施加电压指令值vw*。
89.最后,作为向开关元件311a~311f的控制端子输出的控制信号,生成由开关元件311a~311f的pwm控制中的通断比率即占空比规定的pwm信号。占空比根据u相施加电压指令值vu*、v相施加电压指令值vv*及w相施加电压指令值vw*而运算。
90.以上是三相无刷式电动马达的控制,是为人熟知的控制,所以省略进一步的说明。在该情况下,电动马达进行通常的动作,所以模式切换部323使逆变器310和pwm控制部323成为连接状态。
91.接着,对校正旋转角传感器17的旋转角误差的情况进行说明。该旋转角误差的校正,在电动马达完成而安装于电动助力转向装置这样的适用产品时,例如在工厂出货前进行。
92.当由作业者输入模式切换信号md后,该模式切换信号md对模式切换部323给与,当通过模式切换部323而逆变器310与两相通电控制部322连接后,两相通电控制部323实施两个线圈的通电。
93.两相通电控制部323生成向开关元件311a~311f(参照图4)的控制端子(栅极端子)输出的控制信号,针对定子110的三相线圈110u、110v、110w,以进行两相通电而成为多个旋转停止位置处的预定旋转角(参照图8)的方式依次进行励磁。
94.从两相通电控制部323输出的控制信号,向u相线圈110u、v相线圈110v、w相线圈110w的三相中的两相通电而进行励磁,将其按每预定旋转角依次切换。在本实施方式中,如上述那样,按每15
°
切换。本实施方式的电动马达从图5可知,设为了以电角度360
°
(1循环)得到机械角90
°
的构成。
95.在本实施方式中,如图8的旋转角c[0]~旋转角c[23]所示,每15
°
进行励磁而使马达转子120旋转,在该旋转角c[n]下的旋转停止位置检测旋转角传感器17的输出。通过进行两相通电控制,马达转子120的停止位置精度良好地确定,所以检测精度能够提高。
[0096]
两相通电控制能够通过如以下这样控制向逆变器310中的开关元件311a~311f的
控制端子的输出来进行。以下,一边参照图4一边进行说明。
[0097]
例如,通过生成使开关元件311a及开关元件311d成为接通状态,使其他全部成为断开状态的控制信号,作为u相的端子电压vu施加电压v,作为v相的端子电压vv施加电压(-v),从u相朝向v相使保持电流以预定时间流动。在此,预定时间相当于马达转子120安顿在停止位置的时间。以下说明的预定时间也是同样的。
[0098]
另外,通过生成使开关元件311a及开关元件311f成为接通状态,使其他全部成为断开状态的控制信号,作为u相的端子电压vu施加电压v,作为w相的端子电压vw施加电压(-v),从u相朝向w相使保持电流以预定时间流动。
[0099]
另外,通过生成使开关元件311c及开关元件311f成为接通状态,使其他全部成为断开状态的控制信号,作为v相的端子电压vv施加电压v,作为w相的端子电压vw施加电压(-v),从v相朝向w相使保持电流以预定时间流动。
[0100]
另外,通过生成使开关元件311c及开关元件311b成为接通状态,使其他全部成为断开状态的控制信号,作为v相的端子电压vw施加电压v,作为u相的端子电压vu施加电压(-v),从v相朝向u相使保持电流以预定时间流动。
[0101]
另外,通过生成使开关元件311e及开关元件311b成为接通状态,使其他全部成为断开状态的控制信号,作为w相的端子电压vw施加电压v,作为u相的端子电压vu施加电压(-v),从w相朝向u相使保持电流以预定时间流动。
[0102]
而且,通过生成使开关元件311e及开关元件311d成为接通状态,使其他全部成为断开状态的控制信号,作为w相的端子电压vw施加电压v,作为v相的端子电压vv施加电压(-v),从w相朝向v相使保持电流以预定时间流动。
[0103]
因此,被施加电压(v)的线圈成为n极,被施加电压(-v)的线圈成为s极。并且,接近n极和s极的马达转子120的永久磁铁被在线圈产生的n极和s极吸引,能够精度良好地决定马达转子120的旋转停止位置。
[0104]
这样,马达转子120的s极被通过励磁而磁化为n极的线圈吸引,马达转子120的s极稳定在与该线圈最靠近的位置。该线圈的位置对应于狭槽的位置。由此,能够精度良好地使马达转子120旋转到各狭槽的旋转停止位置。
[0105]
而且,通过对相邻的两个线圈的双方进行励磁,也能够以马达转子120的s极与这两个线圈的中间位置最靠近的方式使其旋转。由此,能够使马达转子120精度良好地旋转到狭槽的数即n个旋转停止位置或n个的2倍的旋转停止位置处。在本实施方式中,在狭槽数12个的三相无刷式电动马达中,通过在能够进行马达轴的旋转停止位置控制的最大数下测定旋转角传感器1717的检测值,能够生成更高精度的传感器误差补正参数。
[0106]
在本实施方式中,构成为在使马达转子旋转到预定的旋转停止位置时,对定子线圈的三相线圈中的预定的两个线圈进行励磁。并且,通过依次切换该励磁的线圈,能够使马达转子转子120精度良好地旋转到各个应该检测的旋转角下的旋转停止位置并停止。
[0107]
该旋转停止位置由进行励磁的两个线圈的组决定,再现性非常高,换言之,即便进行多次励磁,也能够使马达转子120旋转到相同的旋转停止位置。此外,以上是通过两相通电控制部对两相线圈同时进行励磁,但也可以仅对一相线圈进行励磁而使马达转子120旋转。
[0108]
并且,图8所示的24处预定角度下的旋转角传感器17的检测值向控制单元320的传
感器误差补正参数运算部324输入。在传感器误差补正参数运算部324中,输入的检测值与基准值进行比较,求出其差(旋转角误差)。基准值如先前所述预先求出而存储于rom。
[0109]
求出的旋转角误差被实施上述的高速傅里叶变换处理,求出传感器误差补正参数即每个阶数的旋转角误差的正弦波成分的振幅(amns)、旋转角误差的余弦波成分的振幅(amnc)及相位(phn),存储于能够改写的存储元件即eeprom325。由此,旋转角传感器17的校正所需的传感器误差补正参数的取得结束。
[0110]
存储于eeprom325的传感器误差补正参数在实际的控制中的检测旋转角的过程中读出,代入于进行逆高速傅里叶变换处理后的运算式而求出补正值。该补正值反映于检测到的实际的旋转角传感器17的检测值,由此,能够精度良好地检测旋转角。
[0111]
接着,使用图9对工厂出货前的具体的旋转角传感器17的校正方法进行说明。首先,为了进行校正作业,准备各种测定装置、电源电路等。当校正作业的准备完成后,进行步骤s10的作业。
[0112]
《步骤s10》在步骤s10中,将电动马达组装于电动转向装置。此时的电动马达,狭槽的数量是n个,使马达轴旋转到n个旋转停止位置或n个的2倍的旋转停止位置。具体地说,狭槽的数量是12个,使马达轴旋转到24处旋转停止位置。
[0113]
另外,电动马达对车辆的助力转向装置赋予操舵力,如图2、图3所示,包含马达壳体、轴承,进而,旋转角传感器17(17)包含传感器磁体18和磁传感器(检测元件)20。传感器磁体18设置于马达轴,磁传感器20能够检测传感器磁体18产生的磁通的变化。
[0114]
此外,在该状态下电动马达与减速机构切离。其理由在于,在电动马达未与减速机构连接的状态下进行以下的励磁工序,所以能够在没有减速机构的旋转负荷的状态下使马达轴旋转。由此,能够抑制用于励磁的电力的增大。当电动马达的安装完成后,前进至步骤s11的作业。
[0115]
《步骤s11》在步骤s11中,将电池电源连接于电动马达而接通电源。由此,控制单元320开始动作。并且,在该情况下,处于旋转角传感器17的校正模式,所以,从外部向控制单元320输入模式切换信号md,使模式切换部323动作而将逆变器310与两相通电控制部322连接。以后,按照控制单元320的程序,通过以下的步骤执行传感器误差补正参数的运算。
[0116]
《步骤s12》步骤s12是励磁工序。在该步骤s12中,首先,通过两相通电控制使马达转子120旋转到旋转角c[0]下的旋转角位置。该两相通电控制如先前说明那样。通过该两相通电控制,马达转子120精度良好地旋转至预定的旋转停止位置。当励磁工序完成后,执行步骤s13。
[0117]
《步骤s13》步骤s13是旋转位置检测工序。在该步骤s13中,在步骤s12中马达转子120旋转后的状态下,获取旋转角c[0]下的由旋转角传感器17检测到的角度作为检测值。当检测值的获取完成后,将检测值暂时存储于作为工作区域的ram。
[0118]
在此,电动马达与转向装置的减速机构切离。因而,在电动马达未与减速机构连接的状态下进行励磁工序,所以能够在没有减速机构的旋转负荷的状态下,使马达轴旋转。由此,能够抑制用于励磁的电力的增大。另外,马达轴6a的旋转速度的降低受到抑制,能够实现励磁工序及旋转位置检测工序的时间的缩短。当检测值的获取完成后,执行步骤s14的运算。
[0119]
《步骤s14》步骤s14是传感器误差补正参数生成工序。在步骤s14中,读出与旋转角
c[0]对应的、预先求出并存储于rom的基准值,求出与在步骤s13中检测到的检测值的差作为旋转角误差。
[0120]
求出的旋转角误差如上述的式(1)、式(2)所示被实施高速傅里叶变换处理,求出上述的传感器误差补正参数。作为具体的参数,是上述的每个阶数的旋转角误差的正弦波成分的振幅(amns)、旋转角误差的余弦波成分的振幅(amnc)及相位(phn)。当求出传感器误差补正参数后,执行步骤s15的处理。
[0121]
《步骤s15》步骤s15是传感器误差补正参数存储工序。在步骤s15中,将在步骤s14中求出的、由每个阶数的旋转角误差的正弦波成分的振幅(amns)、旋转角误差的余弦波成分的振幅(amnc)及相位(phn)构成的传感器误差补正参数存储于eeprom325(参照图7)。
[0122]
此外,步骤s12的励磁工序也可以设为执行以使马达轴6a顺时针旋转的方式对定子线圈进行励磁的顺时针励磁工序、和以使马达轴6a逆时针旋转的方式对定子线圈进行励磁的逆时针励磁工序。在该情况下,旋转位置检测工序、传感器误差补正参数生成工序也成为与此相匹配的处理。
[0123]
即,步骤s13的旋转位置检测工序执行取得通过顺时针励磁工序而马达轴6a旋转到旋转角c[0]的位置时的旋转角传感器17的检测值的工序、和取得通过逆时针励磁工序而马达轴6a旋转到旋转角c[0]时的旋转角传感器17的检测值的工序。
[0124]
而且,步骤s14的传感器误差补正参数生成工序执行求出通过顺时针励磁工序而马达轴6a旋转到旋转角c[0]的位置时的传感器误差补正参数和通过逆时针励磁工序而所述马达轴6a旋转到旋转角c[0]的位置时的传感器误差补正参数的平均值的运算。
[0125]
例如,在本实施方式中以15
°
刻度设定了检测位置,但在检测30
°
的位置的情况下,有时在顺时针从15
°
的位置旋转到30
°
的位置时的30
°
的位置处的旋转角传感器17的检测值和逆时针从45
°
的位置旋转到30
°
的位置时的30
°
的位置处的旋转角传感器17的检测值产生些许偏离。
[0126]
这是因为,由于马达转子、马达轴6a的惯性,从马达轴6a以旋转到30
°
的位置的方式被励磁起到稳定在30
°
的位置为止,马达轴6a的旋转振动。并且,在决定检测值时,将马达轴6a振动着的状态下的检测值通过平均化处理等而决定为一个检测值。
[0127]
具体地说,这是因为,该马达轴6a的旋转的振动特性,在顺时针的情况下和逆时针的情况下不同,在平均化处理后的检测值中,也因旋转方向的不同而出现差。
[0128]
在像电动助力转向装置的驱动用电动马达这样,使电动马达向两个方向旋转的情况下,通过传感器误差补正参数也使用在两个方向的旋转下检测到的旋转角传感器17的检测值的平均值,能够减小由电动马达的旋转方向的不同导致的传感器误差补正参数的不均。
[0129]
当在步骤s15中旋转角c[0]下的传感器误差补正参数的存储处理完成后,执行步骤s16的处理。
[0130]
《步骤s16》在步骤s16中,执行是否取得并存储了图8所示的多个预定旋转角(c[0]~c[23])下的传感器误差补正参数的判断。在该步骤s16中,当判断为没有完成到预定旋转角c[23]时,执行步骤s17。另一方面,当判断为完成到预定旋转角c[23]时,执行步骤s18。
[0131]
《步骤s17》在步骤s17中,指定执行了步骤s12~步骤s15的预定旋转角的下个预定旋转角并返回步骤s12,再次执行成为对象的预定旋转角c[n]的励磁工序、旋转位置检测工
序、传感器误差补正参数生成工序及传感器误差补正参数存储工序。通过这个的反复,当完成到旋转角c[23]时,执行步骤s18。
[0132]
《步骤s18》在步骤s18中,求出了24处预定角的传感器误差补正参数,断开电池电源而完成旋转传感器的校正。当断开电池电源后,执行步骤s19。
[0133]
《步骤s19》在步骤s19中,将电动马达与减速机构连结而完成作为电动助力转向装置的校正作业。成为电动马达如图2所示由带连结的构成。
[0134]
在本实施方式中,通过在电动助力转向装置所使用的电动马达组装了的状态下进行励磁工序及旋转位置检测工序,能够生成适于作为电动助力转向装置使用时的传感器误差补正参数。
[0135]
例如,马达轴6a在经由轴承支承于马达壳体6h的状态下,具有预定的倾斜。该倾斜成分也成为了产生具有旋转角传感器17的检测值所包含的频率成分的误差的原因。并且,通过励磁工序及旋转位置检测工序在发生该误差的状况下进行,能够生成能够补正该误差的精度高的传感器误差补正参数。
[0136]
另外,在本实施方式中,说明了一个旋转角传感器17的情况,但最近要求冗余系统,所以有时使用两个旋转角传感器。在该情况下,可以考虑以下这样的方法。
[0137]
也就是说,旋转角传感器17具备第一旋转角传感器和第二旋转角传感器。并且,在旋转位置检测工序中,取得在励磁工序中马达轴6a旋转到预定的旋转停止位置时的预定旋转角下的第一旋转角传感器的检测值和第二旋转角传感器的检测值即可。
[0138]
在旋转角传感器17如第一旋转角传感器、第二旋转角传感器那样由多个旋转角传感器构成的情况下,通过在相同定时进行多个旋转角传感器的检测,能够实现旋转位置检测工序中的测定时间的缩短。而且,在马达轴6a处于相同旋转状态时,多个旋转角传感器检测马达轴6a的预定的旋转停止位置的角度,所以能够减小多个旋转角传感器间的测定差。
[0139]
通过以上这样的校正作业得到的传感器误差补正参数存储于eeprom325。该传感器误差补正参数按每个电动马达而不同,所以与各个电动马达对应地存储。
[0140]
接着,对实际的控制中的旋转角误差的补正方法进行说明。图10示出了由控制单元320执行的控制流程,模式切换部323与pwm控制321连接,存储于eeprom325的传感器误差补正参数在pwm控制部321中的求出旋转角的控制中使用。
[0141]
《步骤s20》在步骤s20中,从旋转角传感器17检测实际的马达轴6a的旋转角,该检测值θ暂时存储于工作区域的ram。当旋转角的检测完成后,转移至步骤s21。
[0142]
《步骤s21》在步骤s21中,将通过先前的校正作业求出的传感器误差补正参数从eeprom325读出。传感器误差补正参数是每个阶数的旋转角误差的正弦波成分的振幅(amns)、旋转角误差的余弦波成分的振幅(amnc)及相位(phn)。当传感器误差补正参数读出后,转移至步骤s22。
[0143]
《步骤s22》在步骤s22中,执行各阶数成分的旋转角误差的算出处理。将读出的正弦波成分的振幅(amns)、旋转角误差的余弦波成分的振幅(amnc)及相位(phn)代入于以下的运算式,求出每个阶数的旋转角误差成分的振幅(amn)。
[0144]
amn=amns*sinphn+amnc*cosphn
……
(4)
[0145]
并且,当每个阶数的振幅(amn)求出后,运算每个阶数的旋转角误差。该运算可以利用上述的式(1)如以下这样求出。
[0146]
δθ(n)=amn*sin(n*x+phn)
……
(5)
[0147]
因此,在本实施方式中求出到4阶成分为止,所以将1阶成分~4阶成分的值代入而求出旋转角误差即可。当求出每个阶数的旋转角误差后,转移至步骤s23。
[0148]
《步骤s23》在步骤s23中,将在步骤s22中求出的每个阶数的旋转角误差全部相加,求出最终的旋转角误差(补正值)。也就是说,作为步骤s22和步骤s23的处理,进行了δθ=σamn*sin(n*x+phn)
……
(6)的运算。当求出最终的补正值后,转移至步骤s24。
[0149]
《步骤s24》在步骤s24中,使在步骤s3中求出的旋转角误差δθ如以下这样反映于在步骤s20中检测到的检测值θ。在此,若将反映了误差的旋转角设为“θc”,则成为以下这样。
[0150]
θc=θ
±
δθ
……
(6)
[0151]
由于像这样通过传感器误差补正参数修正旋转角传感器的旋转角误差,所以能够精度良好地执行电动马达的pwm控制。
[0152]
如以上所述,在本发明中,通过对定子线圈的三相线圈中的两相线圈进行励磁,使马达轴6a旋转到预定的旋转停止位置,取得该旋转停止位置处的旋转角传感器的检测值,根据所取得的旋转角传感器的检测值,生成用于补正对电动马达进行驱动控制时的旋转角传感器的检测值的传感器误差补正参数。
[0153]
由此,在使马达转子旋转到预定的旋转停止位置时,对定子线圈的三相线圈中的两个线圈进行励磁。通过依次切换该励磁的线圈,能够使马达转子精度良好地在预定的旋转停止位置停止。
[0154]
该旋转停止位置由励磁的线圈的相决定,再现性非常高,换言之,即便多次进行励磁工序,也能够使马达转子停止于几乎相同的旋转停止位置。
[0155]
这样,通过使用在再现性高的马达转子的旋转停止位置处检测到的旋转角传感器的检测值生成传感器误差补正参数,能够得到精度高的传感器补正值。
[0156]
此外,本发明不限定于上述的实施方式,包含各种变形例。例如,上述的实施方式为了通俗易懂地说明本发明而详细地进行了说明,但不一定限定于具备所说明的全部构成。另外,可以将某实施方式的构成的一部分置换为其他实施方式的构成,另外,可以对某实施方式的构成添加其他实施方式的构成。另外,关于各实施方式的构成的一部分,可以进行其他构成的追加、削除、置换。
[0157]
本技术基于申请日为2020年2月18日、申请号为特愿第2020-025058号的日本技术要求优先权。在此参照并整体引入申请日为2020年2月18日、申请号为特愿第2020-025058号的日本技术的包含说明书、权利要求书、附图及摘要的全部公开内容。
[0158]
附图标记说明
[0159]1…
电动助力转向装置,4
…
齿条(操舵轴),6
…
电动马达,7
…
滚珠丝杠机构,8
…
螺母,9
…
螺母侧带轮,18
…
传感器磁体,20
…
磁传感器(旋转角传感器),110u
…
u相线圈,110v
…
v相线圈,110w
…
w相线圈,200
…
旋转角传感器,310
…
逆变器,311a~311f
…
igbt或mosfet,320
…
控制单元,321
…
pwm控制部,322
…
两相通电控制部,323
…
模式切换部,324
…
传感器误差补正参数运算部,325
…
eeprom。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1