使用具有非均匀功率的光脉冲来检测物体的方法和装置与流程
使用具有非均匀功率的光脉冲来检测物体的方法和装置
1.交叉引用
2.本技术要求于2020年6月1日提交的申请号为16/889,582、发明名称为“使用具有非均匀功率的光脉冲来检测物体的方法和装置(method and apparatus for detecting an object using optical pulses with non-uniform power)”的美国非临时申请的优先权的权益。
技术领域
3.本发明涉及物体扫描方案,尤其涉及一种使用具有非均匀脉冲功率的光脉冲来检测视场角内的物体的方法和装置。
背景技术:
4.高级驾驶辅助系统(advanced driver assistance system,adas)是一种在驾驶或停车期间协助车辆驾驶员的电子系统,这种系统已在汽车行业开发用于自动化、调整或增强车辆系统,以实现安全且轻松的驾驶。随着自动驾驶汽车的发展,adas得到了汽车行业的更多关注。adas采用一套传感器对限定视场角(field of view,fov)内的各种物体进行检测和分类。adas使用的传感器之一是光探测和测距(light detection and ranging,lidar)传感器。
5.飞行时间(time of flight,tof)lidar传感器发射激光脉冲,并接收从目标物体返回或后向散射的光脉冲。因此,tof lidar可以根据发射的光脉冲通过发射时间和接收时间之间的时间差计算目标物体的距离。
6.根据tof lidar方程,从目标物体返回或后向散射的光脉冲的功率与到目标物体的距离的平方成反比。事实上,由于信噪比(signal-to-noise ratio,snr)低,检测远距离物体(例如,远离传感器的物体)更具挑战性。因此,希望增加光脉冲的功率以提升snr,尤其是在检测远距离物体的时候。然而,为了考虑眼睛安全,从tof lidar发射的激光脉冲的功率不能超过一定的功率电平(例如,可接受的暴露极限(admissible exposure limit,ael))。因此,需要一种检测不受上述限制的限定视场角(field of view,fov)内的物体(尤其是远距离物体)的方法和装置。
7.背景技术的目的是揭示申请人认为可能与本发明相关的信息。没有必要承认也不应解释任何上述信息构成与本发明相对的现有技术。
技术实现要素:
8.本发明实施例的目的是提供一种使用具有非均匀功率的光脉冲来检测物体的方法和装置。根据本发明实施例,提供了一种检测视场角(field of view,fov)内的物体的方法。所述方法包括发射第一组光脉冲,其中,所述第一组光脉冲包括具有第一脉冲功率的第一光脉冲和具有第二脉冲功率的第二光脉冲。所述第一脉冲功率与所述第二脉冲功率不同,所述第一组光脉冲的每脉冲功率小于或等于预定义限值。所述方法还包括:接收第一组
返回光脉冲,其中,所述第一组返回光脉冲表示与所述fov内的所述物体相关的信息;从所述第一组返回光脉冲中生成与所述fov内的所述物体相关的所述信息。
9.根据本发明实施例,提供了一种检测视场角(field of view,fov)内的物体的设备。所述设备包括:一个或多个光脉冲发射器,用于发射多个光脉冲,其中,所述多个光脉冲包括具有第一脉冲功率的第一光脉冲和具有第二脉冲功率的第二光脉冲。所述第一脉冲功率与所述第二脉冲功率不同,所述多个光脉冲的每脉冲功率小于或等于预定义限值。所述设备还包括:一个或多个光脉冲接收器,用于接收多个返回光脉冲,其中,所述多个返回光脉冲表示与所述fov内的所述物体相关的信息。所述设备还包括:处理器,用于从所述多个返回光脉冲中生成与所述fov内的所述物体相关的所述信息。
10.上文结合本发明的各个方面描述了实施例,这些实施例可以基于这些方面来实现。本领域技术人员将理解,实施例可以结合描述它们的方面来实现,但也可以与该方面的其它实施例一起实现。当实施例相互排斥或彼此不兼容时,这对于本领域技术人员将是显而易见的。一些实施例可以结合一个方面进行描述,但也可以适用于其它方面,这对本领域技术人员是显而易见的。
11.本发明的一些方面和实施例可以提高从视场角(field of view,fov)内的远距离物体返回的光脉冲的检测概率。提高返回光脉冲的检测概率会增加远距离物体的点云密度,因此扩大了检测fov内的物体的范围。本发明实施例还提高和扩大了低反射率物体或恶劣天气(例如雾天、雨天等)下的物体的检测概率和范围。
附图说明
12.结合附图,通过以下详细描述,本发明的进一步特征和优点将变得显而易见。
13.图1示出了飞行时间(time of flight,tof)光探测和测距(light detection and ranging,lidar)的基本原理。
14.图2a和图2b示出了当lidar扫描目标物体体时,人眼暴露于多个光脉冲。
15.图2c示出了澳大利亚/新西兰标准中的1类和1m类激光产品的可达发射极限(accessible emission limit,ael)和c6=1。
16.图2d示出了澳大利亚/新西兰标准中的ael和最大允许照射量(maximum permissible exposure,mpe)评估中使用的修正因子和转效点。
17.图3示出了不同信噪比(signal-to-noise ratio,snr)下的光脉冲检测概率。
18.图4示出了光脉冲检测器使用现有技术为远距离物体生成的点云。
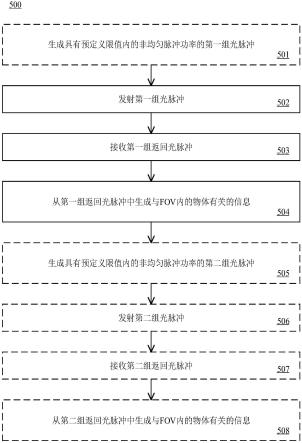
19.图5示出了本发明实施例提供的一种检测fov内的远距离物体的方法。
20.图5a示出了现有技术中的光脉冲检测器的典型发射方案。
21.图5b至5d示出了本发明实施例提供的使用具有非均匀功率的光脉冲来检测物体的光脉冲检测器的发射方案。
22.图6示出了本发明实施例提供的在不同信噪比(signal-to-noise ratio,snr)下针对均匀脉冲功率方案和非均匀脉冲功率方案评估的物体检测概率。
23.图7示出了本发明实施例提供的使用传统均匀脉冲功率方案和非均匀脉冲功率方案为远距离物体生成的点云。
24.图8是本发明实施例提供的传统均匀脉冲功率方案和非均匀脉冲功率方案在不同
距离下的点云密度的数值分析。
25.图9示出了本发明实施例提供的在不同信噪比(signal-to-noise ratio,snr)下针对均匀脉冲功率方案和非均匀脉冲功率方案评估的物体检测概率。
26.图10是本发明实施例提供的电子设备的示意图。
27.需要说明的是,在整个附图中,相似的特征由相似的附图标记标识。
具体实施方式
28.术语“ael”是指可达发射极限(accessible emitted limit),它是通过一个复函数得到的,该复函数可以包括波长、重复率、脉宽或脉冲宽度等变量。在本发明中,ael是根据由澳大利亚/新西兰联合标准在2014年悉尼的澳大利亚标准局/新西兰标准组织的“激光产品安全第1部分:设备分类和要求(safety of laser products part 1:equipment classification and requirements)”中公布的标准计算的。
29.本发明描述了一种使用具有非均匀脉冲功率但不超过预定义限值(例如ael)的光脉冲来检测物体(尤其是视场角(field of view,fov)内的远距离物体)的方法和装置。根据本发明实施例,提高了从远距离物体返回的光脉冲的检测概率。这会增加远距离物体的点云密度,尤其与现有技术相比。在各种实施例中,可以使用光探测和测距(light detection and ranging,lidar)(例如飞行时间(time of flight,tof)lidar)检测这样的远距离物体。
30.根据实施例,提供了一种检测fov内的远距离物体的方法。所述方法包括:发射具有非均匀脉冲功率的第一组光脉冲。这第一组光脉冲可以由包括在检测fov内的物体的设备中的光脉冲发射器发射。所述方法还包括:接收与所述物体进行交互而返回的第一组返回光脉冲。所述第一组返回光脉冲可以表示与所述fov内的所述物体相关的信息。所述方法还包括:从所述第一组返回光脉冲中生成与所述fov内的所述物体相关的所述信息。在一些实施例中,所述方法还包括:发射具有非均匀脉冲功率的第二组光脉冲;接收第二组返回光脉冲。所述第二组返回光脉冲也可以表示与所述fov内的所述物体相关的信息。
31.图1示出了飞行时间(time of flight,tof)光探测和测距(light detection and ranging,lidar)的基本原理。到目标物体130的距离(即d
目标
)可以通过测量发射器110发射光脉冲(例如激光脉冲)的时间点和接收器120接收从目标物体130返回或后向散射的光脉冲的时间点之差来估计。
32.从目标物体130返回的光脉冲需要由接收器120接收,以便估计lidar 100和目标物体130之间的距离。因此,从目标物体130返回的光脉冲的功率在到达接收器120时也要足够强。返回光脉冲的功率p
rx
(t)与lidar 100到目标物体130的距离(即d
目标
)成反比。此外,返回光脉冲的功率p
rx
(t)与发射的光脉冲的功率p
tx
(t)成正比。这可以在数学上表示为:
[0033][0034]
如上面的数学表达式所示,信噪比(signal-to-noise ratio,snr)可能会有显著的衰减,尤其是对于远距离物体。另一方面,snr也可以通过增加发射光脉冲的功率p
tx
(t)来提高。如本文其它地方所述,为了考虑眼睛安全,发射的光脉冲的功率p
tx
(t)的增加量受限于ael。
[0035]
图2a示出了当lidar扫描目标物体时,人眼200暴露于多个光脉冲250。为了考虑眼睛安全,人眼200接收的光脉冲250的总能量(或总功率)受限于ael
总能量
。至少在一些实施例中,ael
总能量
可以根据图2c计算。图2c示出了澳大利亚/新西兰标准中的1类和1m类激光产品的可达发射极限和c6=1。图2c是澳大利亚/新西兰标准提供的表3的复印件。参考图2c,ael
总能量
根据光脉冲的发射持续时间确定。光脉冲的发射持续时间(t)可以如下确定:
[0036]
t=n/f
[0037]
其中,n是每次扫描人眼接收的光脉冲数,f是扫描光脉冲的重复率,以赫兹(hz)为单位。
[0038]
根据现有技术,每脉冲能量ael
每脉冲
可以通过平均ael
总能量
来估计,如下所示:
[0039]
ael
每脉冲
=ael
总能量
/n
[0040]
其中,n是每次扫描人眼接收的光脉冲数。
[0041]
图2b示出了模拟估计ael
总能量
、ael
每脉冲
和人眼从光学脉冲检测器(例如lidar 210)接收的脉冲数。模拟中使用的光脉冲检测器(lidar 210)的规格如下表1所示。
[0042]
表1
[0043]
重复率100khz水平角分辨率0.1
°
激光波长905nm脉宽5ns
[0044]
为了确定每次扫描时暴露于人眼200的脉冲数n,需要首先确定曝光角。参考图2b,曝光角α240可以根据长度d 230以及lidar 210和人眼200之间的距离d 220来估计,如下所示:
[0045][0046]
需要说明的是,距离d 220可以是指lidar 210和人眼200之间的最小可能距离。距离d 220可以由眼睛安全标准(例如,国家定义的标准,例如澳大利亚/新西兰标准)定义。很容易理解,可以使用其它标准来定义这些参数。还需要说明的是,长度d 230表示人眼200的瞳孔的直径。一旦确定了曝光角α240,就可以根据lidar 210的水平角分辨率来计算暴露于眼睛200的光脉冲数,如下所示:
[0047][0048]
已知由lidar 210发射的光脉冲的重复率(f)(例如,f=100khz),为了确定ael
总能量
,需要计算来自lidar 210的光脉冲的总发射持续时间(t)。需要说明的是,重复率(f)可以取本领域技术人员容易理解的其它值。此外,假设光脉冲的总发射持续时间(t)可以通过t=n/f计算,则光脉冲的总发射持续时间t等于330μs(即,33个脉冲/100khz=330μs)。
[0049]
在计算到光脉冲的总发射持续时间t的情况下,ael
总能量
可以根据图2c确定。根据图2c,假设激光波长等于905nm(注:905nm在700nm~1050nm范围内)且总发射时间等于330μs(注:330μs在1.3
×
10
–5s~1
×
10
–3s范围内),则ael
总能量
等于7
×
10
–4t
0.75 c
4 j(焦耳)。根据图2d,参数c4可以根据光脉冲的波长确定。图2d示出了在澳大利亚/新西兰标准中的ael和最
大允许照射量(maximum permissible exposure,mpe)评估中使用的修正因子和转效点(breakpoint)。图2d是澳大利亚/新西兰标准提供的表9的复印件。
[0050]
根据图2d,当激光波长等于905nm(注:905nm在700nm~1050nm范围内)时,参数c4等于10
0.002(λ
–
700)
。因此,假设激光波长等于905nm(即λ=905nm),则参数c4等于2.57(注:100.002
(905
–
700)
=2.57)。
[0051]
根据参数c4的确定值可以计算ael
总能量
,如下所示:
[0052]
ael
总能量
=7
×
10-4
×
(330
×
10-6
)
0.75
×
2.57=4.4μj
[0053]
根据现有技术,每脉冲能量ael
每脉冲
可以通过平均ael
总能量
来估计,如下所示:
[0054][0055]
因此,根据使用均匀脉冲功率电平的现有技术,每脉冲能量受限于133.5nj(即26.7瓦特峰值功率),其中,ael
总能量
等于4.4μj,光脉冲检测器(例如lidar)的规格如上表1所示。
[0056]
图3示出了在使用光脉冲检测器(即neyman pearson检测器)进行估计时不同信噪比(snr)下的光脉冲检测概率。图3表明,当snr较低时,尤其是当snr低于5db时,脉冲检测概率极低。
[0057]
由于脉冲功率与到目标物体的距离成反比,而snr与脉冲功率成正比,因此远距离物体的snr较低。因此,考虑到当snr较低时,光脉冲检测概率较低,tof lidar提供的点云的质量(例如密度)对于长距离物体会显著恶化。这清楚地表明,光学探测器(例如tof lidar)很有可能未正确检测到(或根本没有检测到)远距离物体。
[0058]
图4示出了光脉冲检测器使用现有技术为远距离物体生成的点云。参考图4,列车400只有很少的点云(即点云密度低),而街道450的点云密度高。由于列车400是需要检测的比街道450重要的物体(例如,用于实现adas),因此不希望列车400的点云密度低。由于光脉冲的功率与目标物体的检测概率成正比,而且目标物体的检测概率与目标物体的点云密度成正比,因此提高发射的光脉冲的功率可以增加点云密度。然而,考虑到光脉冲检测器(例如tof lidar)发射的光脉冲具有均匀功率电平,由于存在ael限制,不太可能提高光脉冲的功率,因此使用当前技术也不太可能增加远距离物体的点云密度。
[0059]
图5示出了本发明实施例提供的一种检测fov内的远距离物体的方法。参考图5,提供了一种使用具有非均匀光脉冲功率的一组或多组光脉冲(例如激光脉冲)来检测fov内的远距离物体的方法500。第一组光脉冲的每脉冲功率小于或等于预定义限值,例如每脉冲ael(例如总ael的平均值)。在一些实施例中,在步骤501中,光脉冲发生器可以生成第一组光脉冲(例如激光脉冲)。生成的光脉冲具有不均匀的脉冲功率。例如,第一组光脉冲可以包括具有第一光脉冲功率的一个或多个光脉冲和具有第二光脉冲功率的一个或多个其它光脉冲。第一光脉冲功率和第二光脉冲功率相互不同。第一光脉冲功率和第二光脉冲功率可以是可调的。
[0060]
在一些实施例中,光脉冲发生器包括在检测fov内的物体的设备中。在一些其它实施例中,光脉冲发生器不包括在检测fov内的物体的设备中,而是外部光脉冲发生器。
[0061]
根据实施例,当在步骤501中生成具有非均匀脉冲功率的一组光脉冲时,在步骤502中,一个或多个光脉冲发射器可以发射生成的这一组光脉冲。一个或多个光脉冲发射器
可以是检测fov内的物体的设备的一部分。在步骤503中,一个或多个光脉冲接收器可以接收从fov内的物体(例如目标物体)返回或后向散射的一组光脉冲。一个或多个光脉冲接收器可以是检测fov内的物体的设备的一部分。根据实施例,这一组返回光脉冲(例如,从目标物体返回的一组光脉冲)可以表示与fov内的物体相关的信息。一旦接收到这一组返回光脉冲,在步骤504中,可以从返回光脉冲中生成与fov内的物体相关的信息。与物体相关的信息可以包括三维信息,例如表示fov内的物体的点云。在一些实施例中,生成的信息可以传送给其它外部设备,但这在图5中未示出。
[0062]
根据一些实施例,步骤505至508可以通过与步骤501至504类似或相同的方式可选地执行。可选步骤505至508可以提高fov内的远距离目标物体的检测概率。
[0063]
现在进一步参考图5,在步骤505中,除了在步骤501中生成的第一组光脉冲之外,光脉冲发生器还可以生成第二组光脉冲(例如激光脉冲)。在步骤505中生成的第二组光脉冲也可以具有非均匀脉冲功率。第二组光脉冲的每脉冲功率小于或等于预定义限值,例如每脉冲ael(例如总ael的平均值)。本领域技术人员可以理解,第二组光脉冲可以与在步骤501中生成的第一组光脉冲不同。例如,第二组光脉冲可以包括具有第三光脉冲功率的一个或多个光脉冲和具有第四光脉冲功率的一个或多个其它光脉冲。第三光脉冲功率和第四光脉冲功率相互不同。然而,第三光脉冲功率或第四光脉冲功率可以与第一光脉冲功率或第二光脉冲功率中的一个相同。第三光脉冲功率和第四光脉冲功率可以是可调的。
[0064]
在一些实施例中,光脉冲发生器包括在检测fov内的物体的设备中。在一些其它实施例中,光脉冲发生器不包括在检测fov内的物体的设备中,而是外部光脉冲发生器。
[0065]
根据实施例,当在步骤505中生成第二组光脉冲时,在步骤506中,一个或多个光脉冲发射器可以发射第二组光脉冲,与在步骤502中一样。在步骤507中,光脉冲接收器可以接收从fov内的物体(例如目标物体)返回或后向散射的一组光脉冲,与在步骤503中一样。根据实施例,第二组返回光脉冲(例如,从目标物体返回的第二组光脉冲)也可以表示与fov内的物体相关的信息。一旦接收到这一组返回光脉冲,在步骤508中,可以从第二组返回光脉冲中生成与fov内的物体相关的信息。与物体相关的信息可以包括三维信息,例如表示fov内的物体的点云。在一些实施例中,生成的信息可以传送给其它外部设备,但这在图5中未示出。
[0066]
图5a示出了现有技术中的光脉冲检测器的典型发射方案。参考图5a,每个正方形(即各个像素510)表示发射具有均匀脉冲功率电平(脉冲能量)的光脉冲的传统光脉冲检测器的扫描像素。发射的光脉冲的脉冲功率可以等于总ael的平均值(即ael
每脉冲
=ael
总能量
/n)。换句话说,在现有技术中,每个脉冲的平均脉冲功率等于ael
每脉冲
=ael
总能量
/n。
[0067]
另一方面,根据实施例,与现有技术相反,一种检测物体的新方法使用具有非均匀功率的光脉冲。图5b至图5d示出了本发明实施例提供的使用具有非均匀功率的光脉冲来检测物体的新方法所采用的光脉冲检测器的发射方案。
[0068]
参考图5b,位于最左列、中心列和最右列中的正方形是像素520,位于其余列(即第二最左列和第二最右列)中的正方形是像素530。像素520都表示发射的光脉冲的脉冲功率(即脉冲能量)大于图5a中使用的均匀脉冲功率电平(即均匀能量电平)的光脉冲检测器的扫描像素。需要说明的是,图5a的脉冲功率电平等于总ael的平均值(即ael
每脉冲
=ael
总能量
/n)。另一方面,像素530都表示发射的光脉冲的脉冲功率(即脉冲能量)小于图5a中使用的均
匀脉冲功率电平(即均匀能量电平)的光脉冲检测器的扫描像素。
[0069]
根据实施例,新方法对视场角内的像素使用两个或两个以上脉冲功率电平。发射的光脉冲的两个或两个以上脉冲功率(即不均匀脉冲功率)电平受以下条件约束:
[0070]
a.非均匀脉冲功率的ael
总能量
等于均匀脉冲功率的ael
总能量
(即ael
总能量
不变);
[0071]
b.最大脉冲功率受限于脉冲时间内的ael
每脉冲
。
[0072]
需要说明的是,除图5b中提供的脉冲功率分布模式之外,可以在各种实施例中使用其它模式。例如,图5c和图5d提供了光脉冲检测器使用的不同功率方案(例如脉冲功率分布模式)。根据实施例,检测物体的新方法可以采用使用具有非均匀功率的光脉冲的各种方案。
[0073]
还需要说明的是,虽然为了简单起见,本发明中仅示出了具有两个脉冲功率电平的光脉冲的实施例,但只要满足上述约束条件,就可以在其它实施例中使用两个以上脉冲功率电平。
[0074]
根据实施例,光脉冲检测器可以扫描fov不止一次,并且在扫描fov时可以使用多种功率方案(例如脉冲功率分配模式)。例如,在第一次扫描中,光脉冲检测器的发射器可以使用图5b的功率方案来发射光脉冲。然后,在第二次扫描中,光脉冲检测器的发射器可以使用图5b所示的功率方案的相反模式来发射光脉冲。可选地,在第二次扫描中,光脉冲检测器的发射器可以使用图5c或图5d所示的非均匀功率方案来发射光脉冲。扫描fov时也可以使用具有不同模式(例如,图5d中的一列位移得到的模式)的非均匀功率方案。
[0075]
如上所述,在各种实施例中,根据检测物体使用的功率方案,两个或两个以上脉冲功率电平可以与光脉冲集成。例如,两个脉冲功率电平可以与光脉冲集成,与在图5b至图5d的二进制功率方案中一样。非均匀脉冲功率(即具有两个脉冲功率电平的脉冲功率)的ael
总能量
等于均匀脉冲功率的ael
总能量
(即ael
总能量
不变)。此外,每单脉冲的最大脉冲功率受限于脉冲时间内的ael
每脉冲
。
[0076]
通过具体模拟实例进一步说明两个脉冲功率电平的计算。为了模拟,假设使用了具有上述表1中提供的规格的光脉冲检测器。
[0077]
根据实施例,假设光脉冲检测器具有表1中的规格,则可以使用脉宽确定单脉冲的最大脉冲功率电平。由于在模拟示例中脉宽等于5ns,因此光脉冲的发射时间至少为5ns。考虑到这里确定ael
每脉冲
是为了限制单脉冲的最大脉冲功率电平,则发射时间等于5ns,因为所需的最小发射时间(即脉宽)是5ns。假设激光波长等于905nm(即905nm在700nm~1050nm范围内)且发射时间等于5ns(即5ns在10
–9s~10
–7s范围内),则根据图2c,单脉冲的最大ael等于7.7
×
10
–8c
4 j(焦耳)。假设激光波长等于905nm(即700nm《λ=905nm《1050nm),则根据图2d,参数c4等于2.57(即10
0.002(λ
–
700)
=10
0.002(905
–
700)
=2.57)。因此,基于以下计算,单脉冲的最大ael约等于200nj(即40瓦特峰值功率):
[0078]
ael
每脉冲
=7.7
×
10-8
×
2.57≈200nj
[0079]
如上所述,根据实施例,发射的光脉冲的两个脉冲功率电平(即非均匀脉冲功率)受到以下条件约束:
[0080]
a.非均匀脉冲功率的ael
总能量
等于均匀脉冲功率的ael
总能量
(即ael
总能量
不变);
[0081]
b.最大脉冲功率受限于脉冲时间内的ael
每脉冲
。
[0082]
使用图5b至图5d的二进制功率方案之一可以如下确定光脉冲的脉冲功率电平,同
时符合上述两个约束条件:
[0083]
l1≈200nj(即1.5倍均匀功率电平)
[0084]
l2≈67nj(即0.5倍均匀功率电平)
[0085]
假设具有功率电平l1的像素数与具有功率电平l2的像素数相同。在这个假设下,功率电平l2可以根据上述第一条件(即,非均匀脉冲功率的ael
总能量
等于均匀脉冲功率的ael
总能量
)如上确定。
[0086]
需要说明的是,根据光脉冲检测器(例如lidar)使用的功率方案,可以存在两个以上脉冲功率电平。例如,如果使用三元功率方案,则满足上述约束条件的脉冲功率电平有三个。
[0087]
本发明实施例可以提高fov内的远距离物体的检测概率。图6示出了在不同snr下为均匀脉冲功率方案和非均匀脉冲功率方案评估的物体检测概率。在图6中,将非均匀脉冲功率方案的检测概率计算为脉冲功率电平上限和下限的检测概率的平均值。
[0088]
参考图6,当snr的值在高snr区630内时,均匀脉冲功率方案和非均匀脉冲功率方案的检测概率收敛到1。这表示从短距离目标物体返回或后向散射的脉冲不会丢失。因此,短距离目标物体的点云密度会足够高。
[0089]
当snr的值在中间snr区620内时,非均匀脉冲功率方案的检测概率小于均匀脉冲功率方案的检测概率(即现有技术)。然而,当snr的值在低snr区610内时,非均匀脉冲功率方案的检测概率大于均匀脉冲功率方案的检测概率。
[0090]
虽然非均匀脉冲功率方案可以在低snr区中实现高检测概率,代价是中间snr区中的低检测概率,但这是有优势的,尤其是在需要检测远距离物体的时候。当使用非均匀脉冲功率方案时,从远距离物体(即对应于低snr的物体)返回或后向散射的光脉冲的检测概率和这些物体的点云密度会大于使用均匀脉冲功率方案时的检测概率和点云密度。
[0091]
根据实施例,可以根据扫描场景或fov内的物体的重要性使用不同的非均匀脉冲功率方案。此外,光脉冲的脉冲功率电平可以根据扫描场景或fov内的物体的重要性来调整。调整脉冲功率电平特别有益于snr在低snr区610和中间snr区620的范围内的扫描场景。
[0092]
图7示出了使用传统均匀脉冲功率方案和非均匀脉冲功率方案为远距离物体生成的点云。图7说明了如何使用非均匀脉冲功率方案来增加远距离物体(例如列车400)的点云密度。场景710和715示出了使用传统均匀脉冲功率方案为列车400生成的点云。场景720和725示出了使用非均匀脉冲功率方案为列车400生成的点云。
[0093]
图7清楚地表明,在场景720和725中,列车400的点云数明显较多,而在场景710和715中,街道450的点云密度较高。考虑到列车400是目标物体,比街道450更重要,因此在扫描fov时可以优选使用非均匀脉冲功率方案。由于存在ael限制,使用传统均匀脉冲功率方案可能无法增加远距离物体(例如列车400)的点云密度。
[0094]
图8对点云密度的比较进行了数值分析。图8中的图表提供了传统均匀脉冲功率方案和非均匀脉冲功率方案在不同距离下的点云密度的数值分析。
[0095]
提高远距离物体的检测概率表示扩大物体检测的最大范围。如图9所示,使用脉冲功率电平为1.7和0.3(即1.7倍均匀功率电平和0.3倍均匀功率电平)的非均匀脉冲功率方案,当检测概率(pd)为0.2时,snr会增加1db。由于接收功率与距离平方成反比(即),
将snr增加1db会增加可检测物体的最大距离。在模拟中,将snr增加1db使得物体检测的最大距离范围扩大12%。增加较低snr(例如snr为10db)表明,非均匀功率方案的检测概率的平均值大于均匀脉冲功率方案的检测概率:
[0096]
(p
d(@功率上限电平)
+p
d(@功率下限电平)
)/2》p
d(@均匀功率)
[0097]
根据实施例,如上所述,非均匀脉冲功率方案可以用于提高从远距离物体返回或后向散射的光脉冲的检测概率。提高返回光脉冲的检测概率会使得远距离物体的点云密度更高。此外,检测fov内的物体的最大范围会变大。在扫描视场角(field of view,fov)时,非均匀脉冲功率方案的脉冲功率必须满足眼睛安全标准,即每脉冲ael(对于单脉冲)和总ael(对于一串脉冲)。
[0098]
根据实施例,非均匀脉冲功率方案可以提高其它恶劣条件下物体的检测概率。例如,本发明实施例提高了低反射率物体或恶劣天气(例如,与高大气消光系数相关的雾天和雨天)下物体的检测概率。非均匀功率方案的脉冲功率可以根据重要物体的场景或位置进行调整。本发明各种实施例可以使用两个或两个以上光脉冲发生器来实现,这些发生器可以动态地单独或协作地调整光功率电平。
[0099]
图10是本发明不同实施例提供的检测视场角(field of view,fov)内的物体的电子设备1000的示意图。电子设备1000可以执行本文中显式地或隐式地描述的上述方法和特征的任一或全部操作。例如,飞行时间(time of flight,tof)lidar设备可以配置有设备1000。
[0100]
如图所示,该设备包括处理器1010、存储器1020、非瞬时性大容量存储器1030、i/o接口1040、网络接口1050、光脉冲发射器1060、光脉冲发生器1070和光脉冲接收器1080,所有这些都通过双向总线1090以通信方式耦合。根据一些实施例,可以使用任一或全部示出的元件,或者仅使用一部分元件。在一些实施例中,设备1000可以包括一个或多个收发器,用于执行一个或多个光脉冲发射器1060和一个或多个光脉冲接收器1080的操作,而不是包括单独的一个或多个光脉冲发射器和一个或多个光脉冲接收器。此外,设备1000可以包括一些元件的多个实例,例如,多个处理器、多个存储器或多个收发器。另外,硬件设备中的元件可以直接耦合到其它元件,而不通过双向总线。
[0101]
存储器1020可以包括任意类型的非瞬时性存储器,例如静态随机存取存储器(static random access memory,sram)、动态随机存取存储器(dynamic random access memory,dram)、同步dram(synchronous dram,sdram)、只读存储器(read-only memory,rom)或其任意组合等。大容量存储器1030可以包括任意类型的非瞬时性存储设备,例如固态驱动器、硬盘驱动器、磁盘驱动器、光盘驱动器、usb盘或用于存储数据和机器可执行程序代码的任何计算机程序产品。根据一些实施例,存储器1020或大容量存储器1030可以在其上记录由处理器1010可执行的用于执行上述任何方法操作的语句和指令。
[0102]
一个或多个光脉冲发射器1060可以发射具有至少两个脉冲功率电平的多个光脉冲。例如,多个光脉冲包括具有第一脉冲功率的第一光脉冲和具有第二脉冲功率的第二光脉冲。第一脉冲功率与第二脉冲功率不同。多个光脉冲的每脉冲功率小于或等于预定义限值,例如每脉冲ael(例如总ael的平均值)。根据一些实施例,多个光脉冲可以是由光脉冲发生器1070或一个或多个外部光脉冲发生器生成的光脉冲。在各种实施例中,一个或多个光脉冲发射器1060的操作可以根据由处理器1010执行的语句和指令执行。例如,发射器1060
发射的光脉冲的脉冲功率电平可以由处理器1010执行的语句和指令控制。另外,待发射的光脉冲的曝光角(例如,上述曝光角α240)可以由处理器1010执行的语句和指令控制。在一些实施例中,由处理器1010执行的语句和指令可以由网络接口1050从外部控制器接收。
[0103]
根据一些实施例,光脉冲发生器1070的操作可以根据由处理器1010执行的语句和指令执行。例如,多个光脉冲可以由光脉冲发生器1070根据由处理器1010执行的语句和指令生成生。在一些情况下,光脉冲的脉冲功率电平可以由这些语句和指令确定。在一些实施例中,由处理器1010执行的语句和指令可以由网络接口1050从外部控制器接收。
[0104]
一个或多个光脉冲接收器1080可以接收多个返回光脉冲。多个返回光脉冲是从fov内的物体返回或后向散射的光脉冲。多个返回光脉冲可以表示与fov内的物体相关的信息。与fov内的物体相关的信息可以由处理器1010从返回光脉冲中生成。与物体相关的信息可以包括三维信息,例如表示fov内的物体的点云。在一些实施例中,生成的信息可以通过网络接口1050传送给其它外部设备。
[0105]
应当理解,尽管为了说明的目的,本文描述了该技术的具体实施例,但是可以在不脱离该技术范围的情况下进行各种修改。说明书和附图仅被视为所附权利要求书所定义的本发明的说明并且考虑落于本说明书的范围内的任何和所有修改、变体、组合或均等物。具体地,提供用于存储机器可读取的信号的计算机程序产品或程序元件,或磁或光线、磁带或光盘等程序存储或存储设备,在本技术的范围内,用于根据本技术的方法控制计算机的操作和/或根据本技术的系统构造其部分或全部组件。
[0106]
与本文中描述的方法相关联的动作可以实现为单个计算机程序产品中的编码指令。换句话说,计算机程序产品是一种计算机可读介质,当计算机程序产品被加载到存储器中并在无线通信设备的微处理器上执行时,软件代码被记录在该介质中以执行该方法。
[0107]
与本文中描述的方法相关联的动作可以实现为多个计算机程序产品中的编码指令。例如,所述方法的第一部分可以通过一个计算设备执行,所述方法的第二部分可以通过其它计算设备、服务器等执行。在这种情况下,每个计算机程序产品是一种计算机可读介质,当所述计算机程序产品加载到存储器中并在计算设备的微处理器上执行时,在所述计算机可读介质上记录软件代码以执行所述方法的适当部分。
[0108]
此外,所述方法的每个操作可以在任何计算设备(例如个人计算机、服务器、pda等)上执行,并且根据从任何编程语言(例如c++、java等)生成的一个或多个程序元素、模块或物体或者一个或多个程序元素、模块或物体的一部分来执行。另外,每个操作或实现每个所述操作的文件或物体等可以由专用硬件或为此目的设计的电路模块执行。
[0109]
显然,上述本发明实施例是示例性的,并且可以通过许多方式实现。此类现在或将来的变化不应被视为偏离本发明的精神和范围,并且本领域技术人员显而易见的所有此类修改旨在包括在以下权利要求的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1