用于测量对角线基于衍射叠加目标的度量系统及方法与流程
1.本发明大体上涉及度量系统,且更特定来说涉及一种用于测量对角线基于衍射叠加(dbo)目标的度量系统。
背景技术:
2.叠加度量系统通常通过特性化具有定位于所关注样本层上的目标特征的叠加度量目标而测量样本的多个层的对准。通常在叠加度量期间测量叠加度量目标。当前系统需要旋转样本或样本卡盘以测量叠加度量目标。此系统可增加处理量测量时间且需要额外校准以确保样本在正确位置中。
3.因此,将期望提供一种解决上文识别的先前方法的缺点的系统及方法。
技术实现要素:
4.根据本公开的一或多个实施例,公开一种度量系统。在一个实施例中,所述度量系统包含经配置以固定样本的载物台,一或多个基于衍射叠加度量目标安置于所述样本上。在另一实施例中,所述度量系统包含光源。在另一实施例中,所述度量系统包含一或多个传感器。在另一实施例中,所述度量系统包含经配置以将来自所述光源的照明光引导到所述样本的所述一或多个基于衍射叠加度量目标的一组光学器件,所述一组光学器件包含可插入、可旋转半波片,所述可插入、可旋转半波片可选择性地插入到光学路径中,使得所述可插入、可旋转半波片选择性地传递来自所述一组光学器件的照明通道的照明光及来自所述一组光学器件的收集通道的收集光两者,所述可插入、可旋转半波片经配置以选择性地将来自所述光源的线性偏振照明光的定向与所述一或多个基于衍射叠加度量目标的光栅的定向对准。
5.根据本公开的一或多个实施例,公开一种方法。在一个实施例中,所述方法包含运用光源产生光。在另一实施例中,所述方法包含经由一组光学器件将所述光沿着光学路径引导到安置于样本上的一或多个基于衍射叠加度量目标。在另一实施例中,所述方法包含选择性地将半波片插入到所述光学路径中,使得所述半波片选择性地传递来自所述一组光学器件的照明通道的照明光及来自所述一组光学器件的收集通道的收集光。在另一实施例中,所述方法包含将来自所述光源的线性偏振照明光的定向与所述一或多个基于衍射叠加度量目标的光栅的定向对准。在另一实施例中,所述方法包含使收集光透射穿过所述半波片及收集偏振器(collection polarizer)。在另一实施例中,所述方法包含运用一或多个传感器收集来自所述收集偏振器的光。在另一实施例中,所述方法包含基于所述经收集光确定所述一或多个基于衍射叠加度量目标的第一层与第二层之间的叠加偏移(overlay misregistration)。
6.根据本公开的一或多个实施例,公开一种方法。在一个实施例中,所述方法包含运用光源产生光。在另一实施例中,所述方法包含经由一组光学器件将所述光沿着光学路径引导到安置于样本上的一或多个基于衍射叠加度量目标。在另一实施例中,所述方法包含
选择性地将半波片插入到所述光学路径中,使得所述半波片选择性地传递来自所述一组光学器件的照明通道的照明光及来自所述一组光学器件的收集通道的收集光。在另一实施例中,所述方法包含将来自所述光源的线性偏振照明光的定向与所述一或多个基于衍射叠加度量目标的光栅的定向对准。在另一实施例中,所述方法包含使收集光透射穿过所述半波片及收集偏振器。在另一实施例中,所述方法包含运用一或多个传感器收集来自所述收集偏振器的光。在另一实施例中,所述方法包含基于所述经收集光确定所述一或多个基于衍射叠加度量目标的第一层与第二层之间的叠加偏移。在另一实施例中,所述方法包含接收来自一或多个额外特性化工具的校准数据。在另一实施例中,所述方法包含基于来自所述一或多个额外特性化工具的所述校准数据校正所述一或多个基于衍射叠加度量目标的所述第一层与所述第二层之间的所述经确定叠加偏移。
7.应理解,前文一般描述及下文具体实施方式两者仅为示范性及说明性的且不一定限制如所主张的本发明。并入于本说明书中且构成本说明书的一部分的附图说明本发明的实施例且与一般描述一起用于说明本发明的原理。
附图说明
8.所属领域的技术人员通过参考附图可更好理解本公开的众多优点,其中:
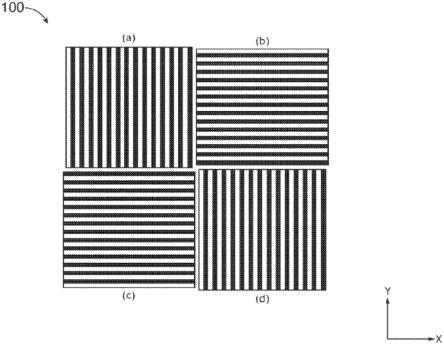
9.图1说明根据本公开的一或多个实施例的基于衍射叠加(dbo)目标。
10.图2说明根据本公开的一或多个实施例的对角线dbo目标。
11.图3a说明根据本公开的一或多个实施例的度量系统的简化示意图。
12.图3b说明根据本公开的一或多个实施例的用于测量dbo目标的方法的流程图。
13.图4a说明根据本公开的一或多个实施例的包含额外特性化系统的度量系统的简化示意图。
14.图4b说明根据本公开的一或多个实施例的对角线dob目标。
15.图4c说明根据本公开的一或多个实施例的先进成像度量(advanced imaging metrology)(aim)目标。
16.图4d说明根据本公开的一或多个实施例的一个三重aim目标。
17.图4e说明根据本公开的一或多个实施例的用于测量dbo目标的方法的流程图。
具体实施方式
18.已关于特定实施例及其特定特征特别展示且描述本公开。本文中所阐述的实施例被视为阐释性的而非限制性的。所属领域的一般技术人员将容易明白,可作出形式及细节上的各种改变及修改而不脱离本公开的精神及范围。
19.现将详细参考在附图中说明的所公开标的物。
20.叠加度量工具可利用多种技术来确定样本层的叠加。基于散射测量的度量(或基于衍射叠加(dbo)度量)可照明叠加目标(例如,dbo目标)且捕捉叠加信号,包含从叠加目标(例如,dbo目标)发出的与照明光束的衍射、散射及/或反射相关联的辐射的角分布。dbo度量工具利用专用度量目标以反映偏移(例如,经对准层之间的叠加)。例如,如图1中所展示,dbo度量工具可利用dbo目标100用于测量x及y方向上的叠加。
21.归因于光刻图案化的最新发展及光刻扫描器中的更先进照明方案,需要使用对角
线图案线来打印目标,如图2中所展示。本文中经审慎考虑,对角线dbo目标200旨在更准确地表示装置且改进叠加准确度及与装置的相关性。
22.然而,为了以正确定向测量对角线dbo目标(例如,图2中所展示的对角线dbo目标200)上的对角线图案,必须旋转样本或样本卡盘。此旋转可能影响处理能力,且可需要额外校准以确保样本放置成正确定向使得反映dbo目标的对角线图案。
23.本公开的实施例涉及一种用于测量对角线基于衍射叠加(dbo)度量目标的系统及方法。明确来说,本公开的实施例涉及经配置以测量对角线dbo度量目标的对角线图案的度量系统的光学配置。特定来说,度量系统包含经配置以选择性地插入于度量系统的光学路径中的可插入、可旋转半波片。
24.图3a说明根据本公开的一或多个实施例的度量系统300的简化示意图。
25.在一个实施例中,度量系统300包含度量子系统302。出于本公开的目的,本文中应注意,度量子系统302可称为度量工具。
26.度量子系统302可为所属领域中已知的任何类型的叠加度量工具。例如,度量子系统302可为基于散射测量的叠加度量工具,其中在光瞳面处分析来自样本的辐射以特性化来自样本的辐射的角分布(例如,与辐射通过样本的散射及/或衍射相关联)。度量系统300可经配置以从安置于样本310上的一或多个度量目标获取一或多个叠加度量测量。在一个实施例中,一或多个叠加度量目标包含一或多个基于衍射叠加(dbo)度量目标。例如,样本310可包含一或多个对角线dbo度量目标,例如图2中所描绘的对角线dbo度量目标200。度量目标可包含但不限于具有对角线图案的第一层及具有直线图案(例如,x方向或y方向)的第二层。例如,抗蚀剂层可具有对角线图案且工艺层可具有直线图案,或反之亦然。在另一例子中,度量目标可包含具有对角线图案的第一层及具有对角线图案的第二层。在此方面,抗蚀剂及工艺层两者可具有对角线图案。
27.在另一实施例中,度量系统300包含通信地耦合到度量子系统302的控制器304。在另一实施例中,控制器304包含一或多个处理器306。例如,一或多个处理器306可经配置以执行维持于存储器装置308或存储器中的程序指令集。控制器304的一或多个处理器306可包含所属领域中已知的任何处理元件。在此意义上,一或多个处理器306可包含经配置以执行算法及/或指令的任何微处理器型装置。此外,存储器装置308可包含所属领域中已知的适于存储可由相关联的一或多个处理器306执行的程序指令的任何存储媒体。例如,存储器装置308可包含非暂时性存储器媒体。作为额外实例,存储器装置308可包含但不限于只读存储器、随机存取存储器、磁性或光学存储器装置(例如,磁盘)、磁带、固态驱动器及类似者。进一步应注意,存储器装置308可与一或多个处理器306一起容置于共同控制器外壳中。
28.在一个实施例中,度量子系统302包含经配置以固定样本310的样本载物台312。例如,样本310可安置于样本载物台312上以促进样本310的移动。在一些实施例中,样本载物台312是可致动载物台。例如,样本载物台312可包含但不限于适于选择性地使样本310沿着一或多个线性方向(例如,x方向、y方向及/或z方向)平移的一或多个平移载物台。通过另一实例,样本载物台312可包含但不限于适于选择性地使样本310沿着旋转方向旋转的一或多个旋转载物台。通过另一实例,样本载物台312可包含但不限于适于选择性地使样本310沿着线性方向平移及/或使样本310沿着旋转方向旋转的旋转载物台及平移载物台。本文中应注意,系统可在所属领域中已知的任何扫描模式中操作。
29.在另一实施例中,度量子系统302包含经配置以产生照明光的光源314。例如,度量子系统302可包含所属领域中已知的任何光源314。例如,度量子系统302可包含但不限于超连续激光源314。
30.在一个实施例中,度量子系统302包含一或多个传感器316。例如,度量子系统302可包含通信地耦合到控制器304的一或多个传感器316。度量子系统302可包含所属领域中已知的任何传感器。例如,度量子系统302可包含定位于光瞳面处的阵列传感器316。
31.在另一实施例中,度量子系统302包含经配置以将来自光源314的照明光引导到样本310的一或多个dbo度量目标的一组光学器件。
32.在一个实施例中,所述一组光学器件包含可插入、可旋转半波片318。例如,可插入、可旋转半波片318可经配置以选择性地插入到光学路径中,使得可插入、可旋转半波片选择性地传递来自所述一组光学器件的照明通道的照明光及来自所述一组光学器件的收集通道的收集光两者。例如,度量子系统302可包含经配置以固定可插入、可旋转半波片318,且选择性地将可插入、可旋转半波片318插入到光学路径中,且使可插入、可旋转半波片318旋转的致动载物台320。
33.通过另一实例,可插入、可旋转半波片318可经配置以选择性地将来自光源314的线性偏振照明光的定向与一或多个dbo度量目标上的光栅的定向对准。例如,可插入、可旋转半波片318可经配置以选择性地使可旋转半波片318旋转以将来自光源314的线性偏振照明光的定向与一或多个对角线dbo度量目标的光栅的定向对准。在此方面,可插入、可旋转半波片318经配置以将来自光源314的入射线性偏振照明的定向与一或多个对角线dbo目标的光栅的定向对准,以增强一或多个传感器316对叠加的灵敏度。
34.致动载物台320可包含但不限于适于选择性地使半波片318沿着一或多个线性方向(例如,x方向、y方向及/或z方向)平移的一或多个平移载物台。通过另一实例,致动载物台320可包含但不限于适于选择性地使半波片318旋转的一或多个旋转载物台。通过另一实例,致动载物台320可包含但不限于适于选择性地使半波片318沿着线性方向平移及/或使半波片318旋转的组合旋转及平移载物台。
35.在一个实施例中,致动载物台320可经配置以响应于来自控制器304的一或多个控制信号而选择性地将可插入、可旋转半波片318插入到光学路径中及/或使半波片318旋转。在另一实施例中,致动载物台320可经配置以响应于来自用户启用控制器的一或多个控制信号而选择性地将可插入、可旋转半波片318插入到光学路径中。在另一实施例中,致动载物台320可经配置以自动将可插入、可旋转半波片318插入到光学路径中。例如,可响应于来自一或多个传感器316的一或多个信号而自动将半波片318插入到光学路径中。在另一实施例中,致动载物台320经配置以使可插入、可旋转半波片318自动旋转。例如,半波片318可基于来自一或多个传感器316的反馈而自动旋转,直到信号(或对比度)最大化。
36.本文中应注意,可插入、可旋转半波片用于将线性偏振光的定向与对角线目标光栅的定向对准,使得可最大化对叠加的信号灵敏度以实现最佳测量精度及准确度。此外,本文中应注意,定位半波片使得光在照明及收集通道两者中双重穿过半波片允许将收集偏振器(系统偏振分析器)维持在固定定向而不会经历不必要的光损耗。
37.在另一实施例中,所述一组光学器件包含偏振单模(sm)光纤322。例如,偏振sm光纤322可经配置以经由偏振sm光纤322递送来自光源314的照明313。
38.在另一实施例中,所述一组光学器件包含变迹照明光瞳324。例如,变迹照明光瞳324可包含可调整倾斜度。例如,变迹照明光瞳的倾斜度可为可调整的。
39.在另一实施例中,所述一组光学器件包含光点扫描器326。例如,光点扫描器326可经配置以为来自光源314的照明提供去相干。
40.在另一实施例中,所述一组光学器件包含一或多个场光阑。例如,所述一组光学器件可包含一或多个照明场光阑328。例如,所述一组光学器件可包含一或多个杂散光照明场光阑328。通过另一实例,所述一组光学器件可包含一或多个收集场光阑330。例如,所述一组光学器件可包含一或多个杂散光收集场光阑330。
41.在另一实施例中,所述一组光学器件包含收集偏振器332。例如,可将收集偏振器332维持在度量子系统302内的固定定向。在此方面,可将样本310可维持在固定定向使得致动样本载物台312将样本310维持在固定定向。
42.本文中应注意,所公开系统的一或多个组件可以所属领域中已知的任何方式通信地耦合到系统的各种其它组件。例如,系统300的一或多个组件可经由有线连接(例如,铜导线、光纤缆线及类似者)或无线连接(例如,rf耦合、ir耦合、数据网络通信(例如,wifi、wimax、蓝牙及类似者))彼此通信地耦合且通信地耦合到其它组件。
43.图3b说明根据本公开的一或多个实施例的用于测量对角线dbo度量目标的方法350的流程图。本文中应注意,方法350的步骤可全部或部分通过系统300实施。然而,进一步应认识到,方法350不限于系统300,因为额外或替代系统级实施例可实行方法350的全部或部分步骤。
44.在步骤352中,运用光源产生光。例如,度量子系统302的光源314可经配置以产生光。在一些实施例中,照明源314包含超连续激光源。
45.在步骤354中,经由光学器件组将用光源产生的光引导到安置于样本上的一或多个dbo度量目标。在一个实施例中,样本310包含安置于样本310上的一或多个dbo度量目标。例如,样本310可包含一或多个对角线dbo度量目标,例如图2中所描绘的对角线dbo度量目标200。度量目标可包含但不限于具有对角线图案的第一层及具有直线图案(例如,x方向或y方向)的第二层。例如,抗蚀剂层可具有对角线图案且工艺层可具有直线图案,或反之亦然。在另一例子中,度量目标可包含具有对角线图案的第一层及具有对角线图案的第二层。在此方面,抗蚀剂及工艺层两者可具有对角线图案。
46.在步骤356中,选择性地将半波片插入到光学路径中。例如,可选择性地插入半波片使得半波片选择性地传递来自所述一组光学器件的照明通道的照明及来自所述一组光学器件的收集通道的收集光。在一个实施例中,度量子系统302的致动载物台320经配置以固定半波片318且选择性地将半波片318插入到光学路径中。在此方面,一旦半波片318插入到光学路径中,致动载物台320便可使半波片318旋转。
47.在一个实施例中,致动载物台320可经配置以响应于来自控制器304的一或多个控制信号而选择性地将可插入、可旋转半波片318插入到光学路径中及/或使半波片318旋转。在另一实施例中,致动载物台320可经配置以响应于来自用户启用控制器的一或多个控制信号而选择性地将可插入、可旋转半波片318插入到光学路径中。在另一实施例中,致动载物台320可经配置以自动将可插入、可旋转半波片318插入到光学路径中。例如,可响应于来自一或多个传感器316的一或多个信号而自动将半波片318插入到光学路径中。在另一实施
例中,致动载物台320经配置以使可插入、可旋转半波片318自动旋转。例如,半波片318可基于来自一或多个传感器316的反馈而自动旋转,直到信号(或对比度)最大化。
48.在步骤358中,将来自光源的线性偏振照明的定向与一或多个dbo度量目标的光栅的定向对准。例如,可插入、可旋转半波片318可经配置以选择性地使可旋转半波片318旋转以将来自光源314的线性偏振照明光的定向与一或多个对角线dbo度量目标的光栅的定向对准。在此方面,可插入、可旋转半波片318经配置以将来自光源314的入射线性偏振照明的定向与一或多个对角线dbo目标的光栅的定向对准,以增强一或多个传感器316对叠加的灵敏度。
49.在步骤360中,使收集光透射穿过半波片及收集偏振器。在一些实施例中,将度量子系统302的收集偏振器332维持在度量子系统302内的固定定向。在此方面,还可将样本310维持在度量子系统302内的固定定向。
50.在步骤362中,运用一或多个传感器收集来自偏振器的光。在一个实施例中,一或多个传感器316与系统300的控制器304通信地耦合。例如,控制器304可经配置以从一或多个传感器316接收指示从一或多个对角线dbo度量目标收集的照明的一或多个信号。在一些实施例中,一或多个传感器316包含定位于度量子系统302的光瞳面处的一或多个阵列传感器316。
51.在步骤364中,基于经收集光确定一或多个对角线dbo度量目标的第一层与第二层之间的叠加偏移。在一个实施例中,控制器304经配置以基于从通信地耦合到控制器304的一或多个传感器316接收的一或多个信号来确定一或多个对角线dbo度量目标的第一层与第二层之间的叠加偏移。
52.在一些实施例中,控制器104经配置以从一或多个传感器316接收指示从与一或多个工艺层对应的一或多个平行目标元件及与一或多个抗蚀剂层对应的一或多个对角线元件收集的照明的一或多个信号。
53.在一些实施例中,控制器304经配置以基于来自一或多个对角线元件的一或多个信号确定第一抗蚀剂层与第二抗蚀剂层之间的叠加偏移。
54.在一些实施例中,控制器304经配置以基于来自一或多个平行元件的一或多个信号确定第一工艺层与第二工艺层之间的叠加偏移。
55.图4a说明根据本公开的一或多个实施例的包含一或多个额外特性化子系统400的度量系统300的简化示意图。应注意,图3a中所描绘的系统300的实施例的描述应扩展到图4a中所描绘的实施例,除非本文中另有提及。
56.在一个实施例中,度量系统300包含一或多个额外特性化子系统400。度量系统300可包含所属领域中已知的任何特性化子系统400。例如,度量系统300可包含电子束度量工具400。通过另一实例,度量系统300可包含基于成像的度量工具400。
57.在一个实施例中,一或多个额外特性化子系统400通信地耦合到控制器304。例如,控制器304可经配置以基于来自一或多个额外特性化工具的校准数据来校正一或多个对角线dbo度量目标的第一层与第二层之间的经确定叠加偏移。例如,控制器304可经配置以基于来自一或多个额外特性化工具的校准数据来校正一或多个对角线dbo度量目标的抗蚀剂层与工艺层之间的经确定叠加偏移。出于本公开的目的,本文中应注意,额外特点子系统400可称为特性化工具。
58.图4b说明根据本公开的一或多个实施例的一或多个对角线dbo目标410,其包含经配置以用额外特性化子系统400测量的一部分。
59.在一个实施例中,来自一或多个额外特性化工具的校准数据是电子束校准数据。例如,额外特性化工具可为经配置以测量dbo目标410的一部分412的电子束度量工具,例如但不限于电子束叠加度量工具。例如,来自dbo目标410的部分412的电子束校准数据可用作标准,且比较所述标准与dbo度量目标410以校准dbo目标。在此方面,可基于比较的输出来调整dbo目标的一或多个测量(例如,校准dbo目标)。
60.本文中应注意,利用电子束度量工具(例如,电子束叠加度量工具)以校准dbo目标改进度量系统300的准确度及相关性。此外,利用电子束度量工具实现产品上叠加(opo)预算的缩减。
61.在2011年3月3日发表的第wo2011026055号国际公开案;及2019年7月12日申请的第16/477,552号美国专利申请案中大体上论述电子束度量工具,所述申请案两者以引用的方式并入本文中。在2019年7月12日申请的第16/477,552号美国专利申请案中大体上论述与电子束度量兼容的目标,所述申请案以引用的方式并入本文中。在2019年11月12日发布的第10,473,460号美国专利;及2020年1月14日发布的第10,533,848号美国专利中大体上描述估计光学及电子束度量工具的准确度,所述申请案两者以引用的方式并入本文中。
62.图4c说明根据本公开的一或多个实施例的用基于成像的特性化子系统400获取的一或多个先进成像度量(aim)目标420。图4d说明根据本公开的一或多个实施例的用基于成像的特性化子系统400获取的一或多个三重aim目标430。
63.在一个实施例中,来自一或多个额外特性化工具的校准数据是基于成像的叠加(ibo)校准数据。例如,额外特性化工具可为经配置以测量ibo目标的基于成像的叠加度量工具。例如,额外特性化工具可经配置以测量aim目标420。在另一例子中,额外特性化工具可经配置以测量三重aim目标430。在此方面,aim目标420及/或三重aim目标430可用作标准目标,且比较所述标准目标与dbo度量目标以校准dbo目标。此外,可基于比较的输出来调整dbo目标的一或多个测量(例如,校准dbo目标)。
64.在一个实施例中,如图4c中所展示,aim目标420可包含抗蚀剂层及工艺层。例如,抗蚀剂层及工艺层可包含类似(或大体上类似)图案。例如,抗蚀剂层及工艺层可包含直线图案(例如,x方向或y方向)。
65.在一个实施例中,如图4d中所展示,三重aim目标430可包含抗蚀剂层及一或多个工艺层。例如,aim目标430可包含第一工艺层及至少一第二工艺层。例如,aim目标430可包含具有第一设计图案(例如,设计1)的第一工艺层及具有不同于设计1的第二设计图案(例如,设计2)的至少一第二工艺层。
66.虽然图4c到4d展示抗蚀剂层及工艺层的特定设计及配置,但本文中应注意,aim目标及三重aim目标可包含所属领域中已知的适于校准dbo目标的任何设计或配置。此外,本文中应注意,不结合dbo目标使用aim目标及/或三重aim目标(例如,仅使用aim目标及/或三重aim目标)远比结合dbo目标使用aim目标及/或三重aim目标更慢。
67.本文中进一步应注意,ibo度量工具对于aim目标及三重aim目标的工艺变化大体上更稳健,使得利用ibo目标可改进度量系统300的相关性及度量系统300的稳健性。
68.图4e说明根据本公开的一或多个实施例的用于测量对角线dbo度量目标的方法
450的流程图。本文中应注意,方法450的步骤可全部或部分通过系统300实施。然而,进一步应认识到,方法450不限于系统300,因为额外或替代系统级实施例可实行方法450的全部或部分步骤。
69.在步骤452中,运用光源产生光。例如,度量子系统302的光源314可经配置以产生光。在一些实施例中,光源314包含超连续激光源。
70.在步骤454中,经由光学器件组将用光源产生的光引导到安置于样本上的一或多个dbo度量目标。在一个实施例中,样本310包含安置于样本310上的一或多个dbo度量目标。例如,样本310可包含一或多个对角线dbo度量目标,例如图2中所描绘的对角线dbo度量目标200。度量目标可包含但不限于具有对角线图案的第一层及具有直线图案(例如,x方向或y方向)的第二层。例如,抗蚀剂层可具有对角线图案且工艺层可具有直线图案,或反之亦然。在另一例子中,度量目标可包含具有对角线图案的第一层及具有对角线图案的第二层。在此方面,抗蚀剂及工艺层两者可具有对角线图案。
71.在步骤456中,选择性地将半波片插入于光学路径中。例如,可选择性地插入半波片使得半波片选择性地传递来自所述一组光学器件的照明通道的照明及来自所述一组光学器件的收集通道的收集光。在一个实施例中,度量子系统302的致动载物台320经配置以固定半波片318且选择性地将半波片318插入到光学路径中。在此方面,一旦半波片318插入到光学路径中,致动载物台320便可使半波片318旋转。
72.在一个实施例中,致动载物台320可经配置以响应于来自控制器304的一或多个控制信号而选择性地将可插入、可旋转半波片318插入到光学路径中及/或使半波片318旋转。在另一实施例中,致动载物台320可经配置以响应于来自用户启用控制器的一或多个控制信号而选择性地将可插入、可旋转半波片318插入到光学路径中。在另一实施例中,致动载物台320可经配置以自动将可插入、可旋转半波片318插入到光学路径中。例如,可响应于来自一或多个传感器316的一或多个信号而自动将半波片318插入到光学路径中。在另一实施例中,致动载物台320经配置以使可插入、可旋转半波片318自动旋转。例如,半波片318可基于来自一或多个传感器316的反馈而自动旋转,直到信号(或对比度)最大化。
73.在步骤458中,将来自光源的线性偏振照明的定向与一或多个dbo度量目标的光栅的定向对准。例如,可插入、可旋转半波片318可经配置以选择性地使可旋转半波片318旋转,以将来自光源314的线性偏振照明光的定向与一或多个对角线dbo度量目标的光栅的定向对准。在此方面,可插入、可旋转半波片318经配置以将来自光源314的入射线性偏振照明的定向与一或多个对角线dbo目标的光栅的定向对准,以增强一或多个传感器316对叠加的灵敏度。
74.在步骤460中,使收集光透射穿过半波片及收集偏振器。在一些实施例中,将度量子系统302的收集偏振器332维持在度量子系统302内的固定定向。在此方面,还可将样本310维持在度量子系统302内的固定定向。
75.在步骤462中,运用一或多个传感器收集来自收集偏振器的光。在一个实施例中,一或多个传感器316与系统300的控制器304通信地耦合。例如,控制器304可经配置以从一或多个传感器316接收指示从一或多个对角线dbo度量目标收集的照明的一或多个信号。在一些实施例中,一或多个传感器316包含定位于度量子系统302的光瞳面处的一或多个阵列传感器316。
76.在步骤464中,基于经收集光确定一或多个对角线dbo度量目标的第一层与第二层之间的叠加偏移。在一个实施例中,控制器304经配置以基于从通信地耦合到控制器304的一或多个传感器316接收的一或多个信号来确定一或多个对角线dbo度量目标的第一层与第二层之间的叠加偏移。
77.在步骤466中,接收来自一或多个额外特性化子系统的校准数据。在一个实施例中,一或多个额外特性化子系统400通信地耦合到控制器304。例如,控制器304可经配置以基于来自一或多个额外特性化工具的校准数据来校正一或多个对角线dbo度量目标的第一层与第二层之间的经确定叠加偏移。例如,控制器304可经配置以基于来自一或多个额外特性化工具的校准数据来校正一或多个对角线dbo度量目标的抗蚀剂层与工艺层之间的经确定叠加偏移。
78.在一个实施例中,来自一或多个额外特性化工具的校准数据是电子束校准数据。例如,额外特性化工具可为经配置以测量dbo目标410的一部分412的电子束度量工具,例如但不限于电子束叠加度量工具。例如,来自dbo目标410的部分412的电子束校准数据可用作标准,且比较所述标准与dbo度量目标410以校准dbo目标。在此方面,可基于比较的输出来调整dbo目标的一或多个测量(例如,校准dbo目标)。
79.在一个实施例中,来自一或多个额外特性化工具的校准数据是基于成像的叠加(ibo)校准数据。例如,额外特性化工具可为经配置以测量ibo目标的基于成像的叠加度量工具。例如,额外特性化工具可经配置以测量aim目标420。在另一例子中,额外特性化工具可经配置以测量三重aim目标430。在此方面,aim目标420及/或三重aim目标430可用作标准目标,且比较所述标准目标与dbo度量目标以校准dbo目标。此外,可基于比较的输出来调整dbo目标的一或多个测量(例如,校准dbo目标)。
80.所属领域的技术人员将认识到,为概念清楚起见,将本文中描述的组件(例如,操作)、装置、物体及伴随其论述用作实例,且审慎考虑各种配置修改。因此,如本文中所使用,所阐述的特定范例及所附论述希望表示其更一般类别。一般来说,使用任何特定范例希望表示其类别,且未包含特定组件(例如,操作)、装置及物体不应被视为限制性的。
81.所属领域的技术人员将了解,存在可实现本文中所描述的过程及/或系统及/或其它技术的各种载体(例如,硬件、软件及/或固件),且优选载体将随着其中部署过程及/或系统及/或其它技术的内容背景而变化。例如,如果实施者确定速度及准确度是最重要的,那么实施者可选择主要硬件及/或固件载体;替代地,如果灵活性是最重要的,那么实施者可选择主要软件实施方案;或又替代地,实施者可选择硬件、软件及/或固件的某一组合。因此,存在可实现本文中所描述的过程及/或装置及/或其它技术的数种可能载体,其任一者并不固有地优于其它者,这是因为待利用的任何载体是取决于其中将部署载体的内容背景及实施者的特定考量因素(例如,速度、灵活性或可预测性)的选择,所述内容背景及考量因素中的任一者可变化。
82.呈现先前描述以使所属领域的一般技术人员能够制造及使用如在特定应用及其要求的内容背景中提供的本发明。如本文中所使用,例如“顶部”、“底部”、“上方”、“下方”、“上”、“向上”、“下”、“向下”及“往下”的方向性术语希望为描述的目的而提供相对位置,且并不希望指定绝对参考系。所属领域的技术人员将明白对所描述实施例的各种修改,且本文中定义的一般原理可应用于其它实施例。因此,本发明并不希望限于所展示及描述的特
定实施例,而是应符合与本文中公开的原理及新颖特征一致的最广范围。
83.关于本文中对大体上任何复数及/或单数术语的使用,所属领域的技术人员可根据内容背景及/或应用来自复数转化成单数及/或从单数转化成复数。为清楚起见,本文中未明确阐述各种单数/复数置换。
84.本文中所描述的全部方法可包含将方法实施例的一或多个步骤的结果存储于存储器中。结果可包含本文中所描述的任何结果且可以所属领域中已知的任何方式存储。存储器可包含本文中所描述的任何存储器或所属领域中已知的任何其它合适存储媒体。在已存储结果之后,结果可在存储器中存取且通过本文中所描述的任何方法或系统实施例使用、经格式化用于显示给用户、通过另一软件模块、方法或系统使用及类似情况。此外,结果可“永久地”、“半永久地”、“暂时地”存储或存储达某一时段。例如,存储器可为随机存取存储器(ram),且结果可能不一定无限期地保存于存储器中。
85.进一步经审慎考虑,上文所描述的方法的实施例中的每一者可包含本文中所描述的任何其它方法的任何其它步骤。另外,上文所描述的方法的实施例中的每一者可通过本文中所描述的任何系统来执行。
86.本文中描述的标的物有时说明含于其它组件内或与其它组件连接的不同组件。应理解,此类所描绘架构仅为示范性的,且事实上可实施实现相同功能性的许多其它架构。在概念意义上,用于实现相同功能性的组件的任何布置经有效“相关联”使得实现所要功能性。因此,在本文中经组合以实现特定功能性的任何两个组件可被视为彼此“相关联”使得实现所要功能性,而不考虑架构或中间组件。同样地,如此相关联的任何两个组件还可被视为彼此“连接”或“耦合”以实现所要功能性,且能够如此相关联的任何两个组件还可被视为彼此“可耦合”以实现所要功能性。可耦合的特定实例包含但不限于可物理配合及/或物理交互组件及/或可无线交互及/或无线交互组件及/或逻辑交互及/或可逻辑交互组件。
87.此外,应理解,本发明通过所附权利要求书定义。所属领域的技术人员将理解,一般来说,在本文中且尤其是在所附权利要求书(例如,所附权利要求书的主体)中所使用的术语一般希望为“开放式”术语(例如,术语“包含(including)”应被解释为“包含但不限于”,术语“具有”应被解释为“至少具有”,术语“包括(includes)”应被解释为“包括但不限于”,及类似者)。所属领域的技术人员进一步将了解,如果预期引入权利要求叙述的特定数目,那么此意图将被明确叙述于权利要求中,且在缺乏此叙述的情况下不存在此意图。例如,作为理解的辅助,以下所附权利要求书可含有使用引导性短语“至少一个”及“一或多个”以引入权利要求叙述。然而,此类短语的使用不应被解释为隐含:由不定冠词“(a/an)”引入权利要求叙述将含有此经引入权利要求叙述的任何特定权利要求限制为仅含有一个此叙述的发明,即使相同权利要求包含引导性短语“一或多个”或“至少一个”及例如“(a/an)”的不定冠词(例如,“(a及/或an)”通常应被解释为意味着“至少一个”或“一或多个”);上述内容对于用于引入权利要求叙述的定冠词的使用同样适用。另外,即使明确叙述经引入权利要求叙述的特定数目,所属领域的技术人员仍将认识到,此叙述通常应被解释为意味着至少所述叙述数目(例如,“两条叙述”的基本叙述(无其它修饰语)通常意味着至少两条叙述或两条或更多条叙述)。此外,在其中使用类似于“a、b及c中的至少一者及类似者”的惯用表述的例子中,一般在所属领域的技术人员将理解所述惯用表述的意义上预期此构造(例如,“具有a、b及c中的至少一者的系统”将包含但不限于仅具有a、仅具有b、仅具有c、同
时具有a及b、同时具有a及c、同时具有b及c及/或同时具有a、b及c的系统,等等)。在其中使用类似于“a、b或c中的至少一者及类似者”的惯用表述的例子中,一般在所属领域的技术人员将理解所述惯用表述的意义上预期此构造(例如,“具有a、b或c中的至少一者的系统”将包含但不限于仅具有a、仅具有b、仅具有c、同时具有a及b、同时具有a及c、同时具有b及c及/或同时具有a、b及c的系统,等等)。所属领域的技术人员进一步将了解,无论是在描述、权利要求书还是在图式中,呈现两个或更多个替代项的实际上任何转折连词及/或短语皆应被理解为审慎考虑以下可能性:包含所述项中的一者、所述项中的任一者或两项。例如,短语“a或b”将被理解为包含“a”或“b”或“a及b”的可能性。
88.据信,通过前述描述将理解本公开及其许多伴随优点,且将明白,可对组件的形式、构造及布置作出各种改变而不脱离所公开标的物或不牺牲全部其材料优点。所描述的形式仅为说明性的,且所附权利要求书希望涵盖且包含此类改变。此外,应理解,本发明通过所附权利要求书定义。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1