处理装置、处理系统、处理方法、程序以及存储介质与流程
1.本发明的实施方式涉及处理装置、处理系统、处理方法、程序以及存储介质。
背景技术:
2.在使用了超声波的检查中,使用进行超声波的发送以及反射波的检测的检测器。为了得到适当的检查结果,期望检测器中没有异常。期望能够判断与检测器有关的异常的技术。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2019-90727号公报
技术实现要素:
6.发明要解决的技术问题
7.本发明要解决的技术问题是提供一种能够判断与检测器有关的异常的处理装置、处理系统、处理方法、程序以及存储介质。
8.用于解决技术问题的手段
9.实施方式的处理装置对通过检测器检测到的反射波的强度的检测结果进行接收,上述检测器包括:进行超声波的发送以及反射波的接收的检测部、和供上述超音波以及上述反射波传播的传播部,处理装置基于上述检测结果,执行判断上述检测部的状态的第1判断和判断上述传播部的状态的第2判断。
附图说明
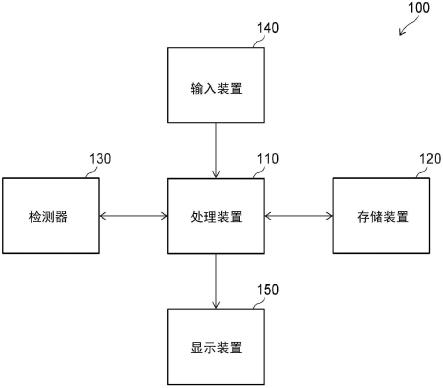
10.图1是表示实施方式的处理系统的构成的框图。
11.图2是表示非破坏检查的状况的示意图。
12.图3是表示检测器的内部构造的示意图。
13.图4是用于说明由实施方式的处理系统进行的检查的示意图。
14.图5是例示通过探查得到的3维的检测结果的示意图。
15.图6是表示检测器的一部分的示意图。
16.图7是表示第1判断的流程图。
17.图8是例示第1强度数据的示意图。
18.图9是表示检测器的一部分的示意图。
19.图10是表示第2判断的流程图。
20.图11是例示第2强度数据的示意图。
21.图12是表示实施方式的变形例的处理系统的构成的示意图。
22.图13是表示实施方式的变形例的处理系统的一部分的立体图。
23.图14是表示实施方式的变形例的处理系统的动作的流程图。
24.图15是表示处理装置的硬件构成的框图。
具体实施方式
25.以下,参照附图对本发明的各实施方式进行说明。
26.附图是示意性或概念性的,各部分的厚度与宽度的关系、部分间的大小的比率等不限于一定与现实相同。即使是表示相同的部分的情况,也有根据附图而相互的尺寸和/或比率不同地表示的情况。
27.在本技术说明书和各图中,对与已说明过的要素相同的要素赋予相同的附图标记而适当省略详细的说明。
28.图1是表示实施方式的处理系统的构成的框图。
29.如图1所示,实施方式的处理系统100具备处理装置110以及存储装置120。存储装置120存储与焊接检查有关的数据。处理装置110处理与焊接检查有关的数据。
30.图1所示的处理系统100还具备检测器130、输入装置140以及显示装置150。检测器130朝向对象发送超声波,对其反射波进行检测(接收)。检测器130例如包含探头(probe)。以下,将由检测器130进行的超声波的发送以及反射波的检测也称为探查(探测,probing)。
31.处理装置110基于检测到的反射波,执行各种处理。例如,处理装置110能够在显示装置150显示用户接口。用户通过显示于显示装置150的用户接口,能够确认通过处理而得到的数据。用户通过用户接口,能够通过输入装置140向处理装置110输入数据。
32.处理装置110经由有线通信、无线通信或网络等而连接于存储装置120、检测器130、输入装置140以及显示装置150。
33.关于焊接检查具体地说明。焊接检查中进行焊接部的非破坏检查。
34.图2是表示非破坏检查的状况的示意图。图3是表示检测器的内部构造的示意图。
35.检测器130例如如图2所示具有人用手能够握持的形状。握持着检测器130的人使检测器130的前端接触于焊接部13,对焊接部13进行检查。
36.检测器130如图3所示设有检测部131以及传播部133。检测部131包含多个检测元件132。检测元件132例如是转换器,发出1mhz以上100mhz以下的频率的超声波。多个检测元件132排列在相互交叉的第1方向以及第2方向上。在图3所示的例子中,多个检测元件132排列在相互正交的x方向以及y方向上。
37.传播部133设于检测器130的前端。检测部131被传播部133覆盖。在使检测器130的前端接触于焊接部13时,传播部133位于检测部131与焊接部13之间。若检测部131发出超声波,则超音波在传播部133中传播并向检测器130的外部发送。若超声波被反射,则该反射波在传播部133中传播而到达检测部131。检测部131检测反射波,将表示反射波强度的信号(电流)向处理装置110发送。从检测部131发送的电流的大小(电流值)对应于反射波的强度。处理装置110基于电流值,决定反射波强度。
38.传播部133由超声波容易传播的树脂材料等构成。通过设置与焊接部13的表面的形状相应的传播部133,容易使超声波传播到焊接部13的内部。通过传播部133,能够抑制检测器130向焊接部13接触时的检测部131的变形、损伤等。传播部133为了抑制向焊接部13接触时的变形、损伤等,具有足够的硬度。
39.如图3所示,检测器130还包含多个布线132a。多个检测元件132上分别连接多个布
线132a。检测元件132通过布线132a向处理装置110发送信号。例如如图2所示,多个布线132a被作为线缆132b收束,连接于处理装置110。
40.图2以及图3表示对作为焊接对象的部件10进行检查的状况。部件10其金属板11(第1部件)和金属板12(第2部件)在焊接部13被点焊接而被制作。如图3所示,在焊接部13形成有凝固部14。凝固部14是金属板11的一部分和金属板12的一部分熔融后相互混合并凝固而形成的。
41.例如,在检查中调查是否形成有焊接部13。并且,在检查中,调查焊接部13的直径、以及直径是否足够等。检查时,在对象的表面涂敷耦合剂(couplant)15,以使超声波容易在对象与检测器130之间传播。各个检测元件132朝向涂敷有耦合剂15的部件10发送超声波us,检测来自部件10的反射波rw。
42.例如如图3所示,1个检测元件132朝向焊接部13发送超声波us。超声波us的一部分被部件10的上表面或下表面等反射。多个检测元件132分别接收(检测)其反射波rw。在探查中,各个检测元件132依次发送超声波us,并利用多个检测元件132检测各个反射波rw。检测器130将检测结果向处理装置110发送。或者,检测器130也可以将检测结果存储于存储装置120。处理装置110取得检测结果,并基于检测结果来检查焊接部。
43.图4是用于说明由实施方式的处理系统进行的检查的示意图。
44.如图4的(a)所示,超声波us被传播部133的表面133a、金属板11的上表面11a以及下表面11b、焊接部13的上表面13a以及下表面13b反射。
45.表面133a、上表面11a、上表面13a、下表面11b以及下表面13b的z方向上的位置彼此不同。即,这些面与检测元件132之间的z方向上的各个距离彼此不同。若检测元件132检测来自这些面的反射波,则反射波的强度的峰值被检测。通过计算在发送了超声波us后直到检测出各峰值为止的时间,能够调查在哪个面反射了超声波us。
46.图4的(b)以及图4的(c)是例示出发送了超声波us后的时间与反射波rw的强度之间的关系的曲线图。在图4的(b)以及图4的(c)中,横轴表示检测到的反射波rw的强度。纵轴表示发送了超声波us后的经过时间。时间换言之是z方向上的位置。图4的(b)的曲线图例示出包含来自金属板11的上表面11a以及下表面11b的反射波rw的检测结果。图4的(c)的曲线图例示出包含来自焊接部13的上表面13a以及下表面13b的反射波rw的检测结果。这里,反射波rw的强度利用绝对值表示。
47.在图4的(b)以及图4的(c)的曲线图中,峰值pe10基于来自表面133a的反射波rw。峰值pe11基于来自上表面11a的反射波rw。峰值pe12基于来自下表面11b的反射波rw。从超声波us的发送到检测出峰值pe11以及峰值pe12为止的时间分别对应于金属板11的上表面11a以及下表面11b的z方向上的位置。
48.同样,峰值pe13基于来自上表面13a的反射波rw。峰值pe14基于来自下表面13b的反射波rw。从超声波us的发送到检测出峰值pe13以及峰值pe14为止的时间分别对应于焊接部13的上表面13a以及下表面13b的z方向上的位置。
49.处理装置110判断在x-y面内的各点的z方向的反射波强度分布中是否存在峰值pe12。具体来说,处理装置110检测可能检测出峰值pe12的z方向的规定范围中的峰值。处理装置110将其峰值的强度与规定的阈值进行比较。若峰值超过阈值,则处理装置110判断为该峰值为峰值pe12。峰值pe12的存在表示如下含义:在该点存在下表面11b,金属板11与12
未接合。处理装置110将检测到峰值pe12的点判断为未被接合。处理装置110依次判断x-y面内的各点是否被接合。被判断为被接合的点的集合对应于焊接部13。
50.反射波的强度也可以通过任意的形态来表现。例如,从检测元件132出力的反射波强度根据相位而包含正的值以及负的值。也可以基于包含正的值以及负的值的反射波强度来执行各种处理。也可以将包含正的值以及负的值的反射波强度变换为绝对值。也可以从各时刻处的反射波强度减去反射波强度的平均值。或者,也可以从各时刻处的反射波强度减去反射波强度的加权平均值、带有加权的移动平均值等。即使是使用了对反射波强度施加这些处理后的结果的情况,也能够执行本技术所说明的各种处理。
51.例如,处理装置110作为检查结果而计算焊接部13的直径。直径是与x-y面平行的任意的一方向上的焊接部13的长度。处理装置110也可以作为检查结果而计算焊接部13的厚度或焊接部13的上表面13a的深度。焊接部13的厚度是上表面13a与下表面13b之间的z方向上的距离。焊接部13的厚度能够基于峰值pe13与pe14之间的时间差td1而计算。上表面13a的深度是上表面11a与13a之间的z方向上的距离。上表面13a的深度能够基于峰值pe11与pe13之间的时间差td2而计算。处理装置110也可以基于焊接部13的直径、焊接部13的厚度以及上表面13a的深度中的至少某一个来判断焊接的合适与否,并将该判断结果作为检查结果输出。
52.图5是例示通过探查得到的3维的检测结果的示意图。
53.在探查中,如上述那样,各个检测元件132依次发送超声波,并利用多个检测元件132检测各个反射波。在图3所示的具体例中,设有在x方向上10个、y方向上8个的合计80个检测元件132。在该情况下,80个检测元件132依次发送超声波。1个检测元件132反复检测80次反射波。从1个检测元件132输出80次z方向的反射波强度分布的检测结果。从1个检测元件132输出的80次反射波的强度分布被合计。合计的强度分布成为在1次探查中1个检测元件132被设置的坐标处的强度分布。关于80个检测元件132各自的检测结果,执行同样的处理。由此,在x-y面内的各点处,生成z方向上的反射波的强度分布。图5利用图像示出了其3维的强度分布。在图5中,亮度高的部分是超声波的反射波强度大的部分。检查中使用了3维的强度分布的数据。
54.处理装置110除了检查以外还执行第1判断以及第2判断。在第1判断中,处理装置110判断检测部131的状态。在第2判断中,处理装置110判断传播部133的状态。
55.(第1判断)
56.图6是表示检测器的一部分的示意图。
57.如图6所示,在检测部131中,有在多个检测元件132的一部分或多个布线132a的一部分产生异常的情况。例如,有产生布线132a的断线、检测元件132的损伤、检测元件132与布线132a的连接不良等、检测元件132不动作的情况。或者,有产生布线132a的损伤、检测元件132与布线132a的连接不良等、流过检测元件132的电流比原本的电流小的情况。
58.这些情况下,该检测元件132、或者与该布线132a连接的检测元件132不能正常执行超声波的发送或反射波的检测。检测部131中有异常时所得到的检测结果若被用于焊接部13的检查,则不能得到与焊接部13有关的适当的检查结果。在第1判断中,处理装置110判断是否没有图6所示那样的检测部131的异常。
59.图7是表示第1判断的流程图。图8是例示第1强度数据的示意图。
60.在图8中,横轴表示发送超声波后的经过时间。纵轴表示各时间处的反射波的强度。图8中利用绝对值表示强度。纵轴的强度表示在各时间由各检测元件132检测出的强度的合计值。若换言之,则图8表示x-y面内的反射波强度的合计值在z方向上怎样分布。
61.在第1判断中,处理装置110选择1个检测元件132,并朝向该检测元件132发送信号(电流)(步骤s11)。被选择的1个检测元件132若接收信号,则发送超声波。然后,多个检测元件132检测其反射波。处理装置110接收检测结果。处理装置110使用z方向的各点处的各检测元件132的检测结果来生成图8所示的第1强度数据(步骤s12)。第1强度数据例如通过多个检测结果的合计而得到。也可以代替合计而使用平均或加权平均等。
62.作为具体例,若图3所示的80个检测元件132中的1个检测元件132发送超声波us,则80个检测元件132检测反射波rw。处理装置110对由80个检测元件132检测到的z方向的强度分布进行合计。由此,生成第1强度数据。处理装置110将生成的第1强度数据保存在存储装置120中。
63.处理装置110判断是否选择了全部的检测元件132(步骤s13)。在存在未选择的检测元件132时,关于某1个未选择的检测元件再次执行步骤s11。通过步骤s11以及s12的反复,生成多个第1强度数据。例如,在80个检测元件132分别发送了超声波us的情况下,生成80个第1强度数据。
64.若关于全部的检测元件132执行了步骤s11以及s12,则处理装置110选择多个第1强度数据中的1个,在该1个第1强度数据中检测反射波的一部分的强度(步骤s14)。例如如图8所示,事先设定能够检测来自表面133a的反射波的z方向的第1范围ra1。处理装置110将第1范围ra1中的反射波的强度与事先设定的第1阈值进行比较(步骤s15)。在强度为第1阈值以上时,处理装置110将发送了与该第1强度数据有关的超声波的检测元件132判断为正常。在强度小于第1阈值时,处理装置110将该检测元件132判断为异常。处理装置110将判断结果保存在存储装置120中。
65.作为具体例,处理装置110如图8所示检测第1范围ra1内强度最大的第1峰值pe1。处理装置110将第1峰值pe1的强度与第1阈值th1进行比较。在第1峰值pe1的强度为第1阈值th1以上时,处理装置110将该第1强度数据的取得时发送了超声波的检测元件132判断为正常。在第1峰值pe1的强度小于第1阈值th1时,处理装置110将该检测元件132判断为异常。处理装置110除了峰值强度以外还可以将第1范围ra1中强度的累计值或平均值与第1阈值th1进行比较,判断检测元件132的状态。
66.在检测元件132被判断为异常时,处理装置110发送第1信息(步骤s16)。第1信息表示检测部131为异常。在检测元件132被判断为正常时,处理装置110判断是否选择了全部的第1强度数据(步骤s17)。在存在未选择的第1强度数据时,关于某1个未选择的第1强度数据再次执行步骤s14。在第1信息的发送后、或者不存在未选择的第1强度数据时,处理装置110结束第1判断。
67.第1判断中的处理的具体内容能够适当变更。例如,在第1判断中,处理装置110也可以每当接收第1强度数据时,就执行步骤s14以及s15。在全部的检测元件132被判断为正常时,处理装置110也可以发送表示检测部131中没有异常这一意思的信息。
68.(第2判断)
69.图9是表示检测器的一部分的示意图。
70.在使检测器130与部件10的前端接触时,如图9所示,有传播部133上附着异物f的情况。异物f例如是金属的微细粒子。若异物f附着于传播部133,则在传播部133的表面133a上,超声波us被异物f散射。朝向检测部131前进的反射波rw减少,被检测部131检测的反射波的强度降低。若大量的异物f附着于传播部133,则被检测的反射波的强度大幅降低。若传播部133上有异常时得到的检测结果被用于焊接部13的检查,则不能得到与焊接部13有关的适当的检查结果。在第2判断中,处理装置110判断是否没有图9所示那样的传播部133的异常。
71.图10是表示第2判断的流程图。图11是例示第2强度数据的示意图。
72.在图11中,横轴表示发送了超声波后的经过时间。纵轴表示各时间处的反射波的强度。图11中利用绝对值表示强度。并且,纵轴的强度表示1次探查中的各时间处的强度的合计值。
73.处理装置110使检测部131执行探查(步骤s21)。处理装置110使用通过探查得到的检测结果来生成第2强度数据(步骤s22)。第2强度数据是在探查中多个检测元件132分别对反射波进行检测而得到的多个强度数据中的至少一部分的合计。第2强度数据也可以是多个强度数据中的至少一部分的平均或者加权平均。也可以将多个第1强度数据用于第2强度数据的生成。例如,第2强度数据通过多个第1强度数据的合计、平均或加权平均而生成。在第2判断之前执行第1判断的情况下,处理装置110也可以对通过第1判断得到的多个第1强度数据进行合计来生成第2强度数据。该情况下,省略探查。在第1判断之前执行第2判断的情况下,也可以将通过第2判断的探查得到的检测结果用于第1判断。通过将利用第1判断以及第2判断的一方得到的检测结果也在另一方中利用,从而能够缩短判断所需要的时间。
74.作为具体例,每当图3所示的1个检测元件132发送超声波us时,就由80个检测元件132检测反射波rw。若80个检测元件132分别发送超音波us,则总计得到6400个检测结果。处理装置110对6400个通过检测元件132检测到的z方向上的强度分布进行合计。由此,生成第2强度数据。在第2判断之前执行第1判断的情况下,通过对80个第1强度数据进行合计,能够生成第2强度数据。
75.处理装置110在第2强度数据中检测反射波的一部分的强度(步骤s23)。例如如图11所示,事先设定来自表面133a的反射波能够被检测的z方向的第2范围ra2。第2范围ra2也可以与第1范围ra1相同。处理装置110将第2范围ra2中的反射波的强度与事先设定的第2阈值进行比较(步骤s24)。在强度为第2阈值以上时,处理装置110将传播部133判断为正常。在强度小于第2阈值时,处理装置110将传播部133判断为异常。处理装置110将判断结果保存在存储装置120中。
76.作为具体例,处理装置110如图11所示检测第2范围ra2内强度最大的第2峰值pe2。处理装置110将第2峰值pe2的强度与第2阈值th2进行比较。在第2峰值pe2的强度为第2阈值th2以上时,处理装置110将传播部133判断为正常。在第2峰值pe2的强度小于第2阈值th2时,处理装置110将传播部133判断为异常。处理装置110除了峰值强度以外还可以将第2范围ra2中的强度的累计值或平均值与第2阈值th2进行比较,来判断传播部133的状态。
77.在传播部133被判断为异常时,处理装置110发送第2信息(步骤s25)。第2信息表示传播部133为异常。在第2信息发送后或传播部133为正常时,处理装置110结束第2判断。
78.第2判断中的处理的具体内容能够适当变更。例如,在传播部133被判断为正常时,
处理装置110也可以发送表示在传播部133中没有异常这一意思的信息。并且,第2强度数据也可以仅使用来自一部分的检测元件132的检测结果而生成。例如,在异物f主要附着于表面133a的外周部的情况下,也可以使用来自检测部131中位于外周部的检测元件132的检测结果,生成第2强度数据。
79.关于第1判断以及第2判断,第1范围ra1以及第2范围ra2是基于检测部131与传播部133的表面133a之间的z方向上的距离而设定的。第1阈值th1以及第2阈值th2是基于检测部131以及传播部133为正常状态下的来自表面133a的反射波的强度和反射波强度的检测结果的偏差而设定的。
80.例如,处理装置110将第1信息或第2信息向显示装置150输出。用户通过确认在显示装置150显示的第1信息或第2信息,能够确认在检测器130的何处存在原因。处理装置110除了显示装置150以外,也可以向检查的执行者或焊接装置的管理者等的终端装置发送第1信息或第2信息。
81.处理装置110也可以与第1信息一起输出表示检测部131的异常的第1数据。处理装置110也可以与第2信息一起输出表示传播部133的异常的第2数据。第1数据以及第2数据例如是图8以及图11所示的反射波强度的检测结果。或者,第1数据以及第2数据也可以是表示反射波强度的检测结果的图像。第1数据以及第2数据也可以是通过步骤s14以及s23检测到的反射波的一部分的强度。通过输出第1数据或第2数据,用户能够确认处理装置110将检测部131或传播部133判断为异常的根据。由此,能够使处理系统100以及处理装置110的使用方便性以及可靠性提高。
82.说明实施方式的效果。
83.如图6以及图9所示,在检测器130中,有在检测部131或传播部133发生异常的情况。若在发生了异常的状态下执行使用了检测器130的检查,则有可能不能得到适当的检查结果。为了使检查精度提高,期望使用不存在上述异常的、正常的检测器130来执行检查。
84.作为用于使检查精度提高的方法,可以举出检测部131以及传播部133的定期的更换。该情况下,为了维持检测器130的正常状态,优选的是更换的频度较高。另一方面,更换过程中不能执行检查。因此,若是更换的频度变高,则检查的效率降低。作为其他方法,有由用户确认被检测的反射波强度的数据,并由用户判断异常的有无的方法。该情况下,异常的判断依赖于用户的经验和感觉。检测部131的更换与传播部133的更换相比,需要更长的时间。例如,若无论传播部133的异常如何、更换检测部131和传播部133这两者,则检测器130的维护所需要的时间不必要地变长。
85.实施方式的处理装置110关于检测器130执行第1判断以及第2判断。通过第1判断以及第2判断的执行,能够调查在检测器130的何处存在异常。由此,与将检测部131以及传播部133定期地更换的情况相比,更换的频度降低,能够使检查的效率提高。并且,在判断为检测部131以及传播部133的一方中存在异常的情况下,用户只要仅将该一方更换即可。例如,在判断为传播部133中存在异常的情况下,用户不更换检测部131,而是仅更换传播部133。因此,缩短检测器130的维护所需要的时间,并且还能够降低维护的成本。
86.根据图7以及图10所示的第1判断的方法以及第2判断的方法,能够精度更良好地判断检测部131以及传播部133的异常。因此,检测部131或传播部133能够降低被不必要地更换的可能性。
87.执行第1判断以及第2判断的定时是任意的。优选的是,第1判断以及第2判断在焊接部13的检查前执行。由此,能够使检查的精度提高。
88.第2判断优选的是在第1判断之后执行。若任意检测元件132为异常,则与全部的检测元件132为正常的情况相比,合计后的反射波强度降低。因此,在第2判断中,有可能错误判断为传播部133存在异常。通过在检测部131被判断为正常后执行第2判断,能够提高第2判断中的判断的精度。在检测部131被判断为异常的情况下,在检测部131的更换后执行第2判断。也可以在检测部131的更换后且第2判断之前,再次执行第1判断。
89.例如,第1判断以及第2判断在检测器130从其他的部件离开的状态下被执行。若传播部133与其他的部件接触,则来自表面133a的反射波强度根据接触的部件的特性而变化。由此,在第1判断以及第2判断中有可能输出错误的判断结果。在检测器130从其他的部件离开的状态下执行第1判断以及第2判断的情况下,第1阈值th1以及第2阈值th2基于该状态下的来自表面133a的反射波强度而设定。
90.或者,也可以为了第1判断以及第2判断而准备特定的部件。在检测器130与该部件接触的状态下,执行第1判断以及第2判断。只要能够使来自表面133a的反射波强度稳定,则也可以在第1判断以及第2判断的执行时,检测器130与其他的部件接触。
91.例如,在第1判断以及第2判断之后,检测器130与检查对象的焊接部接触,探查该焊接部。通过探查,取得对来自焊接部的反射波的强度进行表示的第3强度数据。第3强度数据如图5所示是3维的数据。处理装置110使用第3强度数据来检查焊接部。
92.(变形例)
93.以上说明过的焊接部的检查也可以通过机器人自动地执行。
94.图12是表示实施方式的变形例的处理系统的构成的示意图。
95.图13是表示实施方式的变形例的处理系统的一部分的立体图。
96.图12所示的处理系统100a具有处理装置110以及机器人160。机器人160包括检测器130、摄像装置161、涂敷装置162、机械臂(manipulator)163以及控制装置164。
97.摄像装置161对被焊接的部件进行摄影,取得图像。摄像装置161从图像中提取焊接痕,检测焊接部13的大致位置。涂敷装置162将耦合剂涂敷于焊接部13的上表面。
98.检测器130、摄像装置161以及涂敷装置162如图13所示设置在机械臂163的前端。机械臂163是垂直多关节型、水平多关节型或并联连杆型。通过机械臂163的驱动,能够使检测器130、摄像装置161以及涂敷装置162移位。控制装置164控制机械臂163的动作。控制装置164是所谓的机器人控制器。检测器130、摄像装置161以及涂敷装置162的动作通过处理装置110或控制装置164来控制。
99.图14是表示实施方式的变形例的处理系统的动作的流程图。
100.首先,处理装置110执行第1判断以及第2判断(步骤s31以及s32)。处理装置110向控制装置164发送存储在存储装置120中的焊接部13的坐标。控制装置164驱动机械臂163朝向接收到的坐标使机械臂163的前端移动。若检测器130移动到所接收到的坐标附近,则摄像装置161将部件10摄影,从取得的图像中检测焊接部13的详细的位置(步骤s33)。
101.控制装置164驱动机械臂163,使涂敷装置162移动到所检测到的位置附近。涂敷装置162将耦合剂涂敷于焊接部13(步骤s34)。控制装置164驱动机械臂163,使检测器130移动,以使检测器130的前端接触于涂敷了耦合剂的焊接部13。若检测器130的前端经由耦合
剂接触到焊接部13,则处理装置110使检测器130执行探查(步骤s35)。
102.处理装置110基于通过探查得到的检测结果(第3强度数据),检查焊接部13(步骤s36)。处理装置110判断是否存在未检查的焊接部13(步骤s37)。在存在未检查的焊接部13时,处理装置110向控制装置164发送未检查的焊接部13的坐标。控制装置164驱动机械臂163使机械臂163的前端朝向所接收到的坐标移动。对于未检查的焊接部13再次执行步骤s33。
103.在用于执行步骤s33的机械臂163的驱动过程中,也可以执行第1判断以及第2判断。由此,在机械臂163的驱动过程中、检测器130的探查过程中等,即使是在检测部131或传播部133发生了异常的情况,也能够更早期地发现检测部131或传播部133的异常。
104.若通过第1判断或第2判断而判断为检测部131或传播部133中有异常,则处理装置110也可以向控制装置164发送信号(第1信息或第2信息)。控制装置164若接收该信号,则使机械臂163停止。控制装置164也可以在使机械臂163的前端部向事先设定的位置移动后,使机械臂163停止。
105.图15是表示处理装置的硬件构成的框图。
106.例如,实施方式的处理装置110是计算机,具有rom(read only memory)111、ram(random access memory)112、cpu(central processing unit)113以及hdd(hard disk drive)114。
107.rom111存储有控制计算机的动作的程序。rom111存储有为了使计算机执行上述的各处理而需要的程序。
108.ram112作为将rom111所存储的程序展开的存储区域发挥功能。cpu113包含处理回路。cpu113读入rom111所存储的控制程序,并按照该控制程序来控制计算机的动作。并且,cpu113将通过计算机的动作而得到的各种数据向ram112展开。hdd114对读取所需的必要的数据、读取的过程所得到的数据进行存储。hdd114例如作为图1所示的存储装置120发挥功能。
109.处理装置110也可以代替hdd114而具有emmc(embedded multi media card)、ssd(solid state drive)、sshd(solid state hybrid drive)等。
110.处理装置110的各个处理以及功能也可以通过更多的计算机的协作来实现。
111.输入装置140包含鼠标、键盘以及触摸面板中的至少某一种。显示装置150包含显示器以及投影仪中的至少某一种。也可以使用如触摸面板那样作为输入装置140以及显示装置150这两方发挥功能的装置。
112.以上,说明了通过处理系统100或100a来检查被点焊接的焊接部13的例子。不限于该例子,也可以通过处理系统100或100a来检查通过其他方法焊接的部件。例如,处理系统100或100a也可以检查被电弧焊接、激光焊接或缝焊的部件。关于通过这些方法焊接的部件,也能够实现使用了检测器130的非破坏检查。
113.检测器130也能够应用于被焊接的部件以外的非破坏检查。该情况下,也通过根据第1判断以及第2判断来调查检测器130的异常,从而能够更高精度地执行检查。
114.根据以上所说明的处理装置、处理系统或处理方法,能够更高精度地判断与检测器有关的异常。通过使用用于使计算机作为上述的处理装置动作的程序,能够得到相同的效果。
115.上述的各种数据的处理也可以作为能够使计算机执行的程序而被记录在磁盘(软盘以及硬盘等)、光盘(cd-rom、cd-r、cd-rw、dvd-rom、dvd
±
r、dvd
±
rw等)、半导体存储器等的、能够被计算机读取的非暂时性存储介质(non-transitory computer-readable storage medium)中。
116.例如,记录介质所记录的数据能够通过计算机(或嵌入式系统)读出。在记录介质中记录形式(存储形式)是任意的。例如,计算机从记录介质将程序读出,基于该程序使cpu执行程序所记述的指示。在计算机中,程序的取得(或读出)也可以通过网络来进行。
117.以上,例示了本发明的若干实施方式,但这些实施方式是作为例子而提示的,不意图限定发明的范围。这些新的实施方式能够通过其他各种形态实施,在不脱离发明的主旨的范围内能够进行各种省略、替换、变更等。这些实施方式及其变形例包含在发明的范围、主旨中,并且包含在权利要求书所记载的发明和其等价的范围中。并且,上述的各实施方式能够相互组合来实施。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1