灰尘传感器的制作方法
1.本发明涉及一种灰尘传感器,更详细地说,涉及通过照射光来检测出存在于空气中的灰尘的光学式灰尘传感器。
背景技术:
2.近来,现实当中针对微尘提出了各种问题,并且针对用于测量微尘的灰尘传感器的研究越发活跃。
3.灰尘传感器是测量包含在空气中的灰尘粒子的量或浓度的装置。在灰尘传感器中,光学式传感器被广泛利用。光学式灰尘传感器通过对空气中照射光,并检测被灰尘散射的光来测量灰尘的量。根据照射的光的种类,灰尘传感器分类为多种。
4.在灰尘传感器中,具有基于led(light emitting diode)发光元件或红外线发光元件的传感器。该方式具有:光源部,由led元件构成;受光部,如光电二极管(pd,photo diode);以及透镜,聚集由空气中的灰尘散射的光。
5.但是,所述传感器照射可视光线区域或红外线区域的光,在微尘的尺寸小于光的波长的情况下,存在不能准确地测量的缺点。
6.另一方面,灰尘传感器中有通过照射激光来检测灰尘的灰尘传感器。在该方式中,从光源部照射激光,而不是照射可视光线或红外线区域的光。该方式具有容易测量尺寸较小的微尘的优点。
7.但是,由于激光灰尘传感器照射的光的范围小,灰尘粒子比光的照射范围大的情况下,存在测量误差相当大的问题。例如,参照图6,可以知晓激光灰尘传感器在测量pm1.0时与实际测量值大致相同,但是,在测量pm2.5时产生轻微误差,在测量pm10时与实际测量值差异较大。
8.即,根据现有技术,为了测量大的灰尘粒子,需要配置可视光线或红外线区域的灰尘传感器,为了测量小的灰尘粒子,需要配置激光灰尘传感器,因此存在无法同时测量存在于空气中的大的灰尘粒子和小的灰尘粒子的问题。
技术实现要素:
9.发明要解决的问题
10.本发明所要解决的课题在于,提供一种能够同时准确地测量存在于空气中的大的灰尘粒子和微尘粒子的灰尘传感器。
11.本发明所要解决的另一个课题在于,提供一种在测量灰尘的总浓度的同时,能够测量灰尘的单个尺寸的灰尘传感器。
12.本发明的课题并不限于上述提出的课题,本领域的技术人员可以从下面的说明中清楚地理解未提出的其他课题。
13.用于解决问题的手段
14.为了实现所述课题,本发明实施例的灰尘传感器包括:外壳,形成有空气吸入口和
空气吐出口;空气流路,形成在外壳的内部,一端与空气吸入口连接,另一端与空气吐出口连接,包括空气流动方向彼此不同的第一流路和第二流路;送风风扇,配置在空气流路上;第一感测模块,配置在空气流路上,检测空气中的灰尘粒子;以及第二感测模块,配置在空气流路上,配置在比第一感测模块更下游的位置,检测比第一感测模块检测的灰尘粒子的尺寸更小的灰尘粒子。
15.第二流路在与第一流路的延伸方向不同的方向上延伸,第一感测模块可以配置于第一流路,第二感测模块可以配置于第二流路。
16.第一流路可以包括:第一上部流路,入口端与空气吸入口连通,形成规定的截面积,配置有第一感测模块;以及第一下部流路,入口端与第一上部流路连通,出口端的截面积的尺寸小于入口端的截面积的尺寸。
17.第一流路的上端可以与空气吸入口连通,朝下方延伸,下端可以与第二流路连通。
18.第一感测模块可以包括:第一发光构件,配置在空气流路的侧面,从侧方照射第一光;以及第一受光构件,配置在与第一发光构件的照射方向和空气流动方向均交叉的方向上,检测第一光。
19.第二感测模块可以包括;第二发光构件,配置在空气流路的侧方,从侧方照射第二光;以及第二受光构件,配置在与第二发光构件的照射方向和空气流动方向均交叉的方向上,检测第二光。
20.送风风扇可以配置成,相较于空气吸入口更靠近空气吐出口。
21.空气流路还包括与第二流路的出口端连通的第三流路,送风风扇可以配置于第三流路。
22.空气流路可以包括:第一流路,与空气吸入口连接;第三流路,与空气吐出口连接,与第一流路相对;以及第二流路,连接第一流路和第二流路。
23.其他实施例的具体内容包含在详细的说明和附图中。
24.发明的效果
25.本发明的灰尘传感器具有如下的一种或者多种效果。
26.第一、在作为上游的第一流路,第一感测模块检测相对较大的灰尘粒子,在作为下游的第二流路,第二感测模块检测相对较小的灰尘粒子,从而具有通过同时测量存在于特定的体积的空气中的各种尺寸的灰尘粒子来提高准确度的优点。
27.第二、由于第一流路和第二流路的空气流动方向彼此不同,在连接第一流路和第二流路的第一弯曲流路,由于惯性力,尺寸较大的灰尘与第一弯曲流路的壁碰撞并被捕集,因此还具有在第二感测模块运转时误差减小的优点。
28.第三、空气在第一弯曲流路回旋,由于向心力,尺寸较大的灰尘粒子在第一弯曲流路的外侧壁被捕集,因此还具有在第二感测模块运转时误差减小的优点。
29.本发明的效果不限于上述效果,本领域技术人员可以从权利要求书的描述中清楚地理解未提及的其他效果。
附图说明
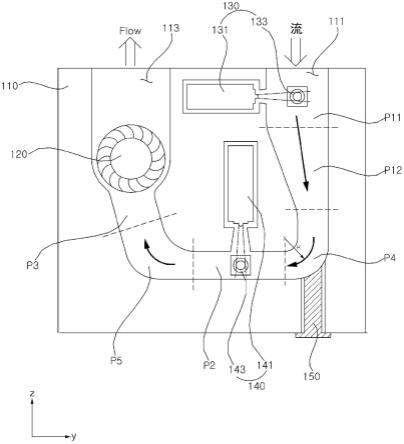
30.图1是简略地示出本发明的灰尘传感器的内部结构的主视图。
31.图2是放大示出图1的第一流路部分的图。
32.图3是示出第一感测模块的测量方法和测量结果的例示的图。
33.图4是放大示出图1的第二流路部分的图。
34.图5是示出第二感测模块的测量方法和测量结果的例示的图。
35.图6是示出第二感测模块针对不同的灰尘粒子尺寸的灰尘粒子测量结果的图。
具体实施方式
36.通过参照附图和以下详细描述的实施例,本发明的优点、特征及其实现方法会变得更加明确。然而,本发明不限于以下公开的实施例,可以以互不相同的多种形式实现,本实施例仅为了充分公开本发明,并为了向本领域普通技术人员完整地公开本发明的范围而提供,本发明的保护范围仅由权利要求的范围来决定。在整个说明书中,相同的附图标记表示相同的构成要素。
37.以下,根据本发明的实施例,参照用于说明灰尘传感器的附图,对本发明进行说明。
38.参照图1,图1作为主视图,图1的前方为灰尘传感器的前方。图1的灰尘传感器的上侧为上方。以空气流路p为基准,第一发光构件131或第二发光构件141配置在空气流路p的内侧。外壳110的侧面配置在空气流路p的外侧。
39.图1是示出本发明的灰尘传感器的图。灰尘传感器测量包含在空气中的灰尘粒子的量或浓度。
40.本发明的灰尘传感器是通过照射光来检测灰尘的光学式传感器。光学式传感器对空气中照射光,照射的光与灰尘碰撞而一部分被反射、衍射或散射,并通过检测被反射、衍射或散射的光来测量灰尘的尺寸或量。
41.本发明的灰尘传感器测量大范围的灰尘。近来,将存在于空气中的灰尘粒子分类为微尘或超微尘等多种类型。空气中分类为普通灰尘粒子、由尺寸比普通灰尘粒子小得多的粒子构成的微尘、由尺寸比微尘更小的粒子构成的超微尘等。由于微尘或超微尘相比于其他灰尘粒子,粒子的尺寸非常小,因此难以设计能够一次性测量普通灰尘和微尘或超微尘的灰尘传感器,并且由于存在普通灰尘,在只测量微尘或超微尘的情况下,存在噪声大且准确度低的问题。
42.由此,本发明的灰尘传感器提供一种对普通灰尘、微尘或超微尘进行分类,并且在分类的范围内采用能够测量对应灰尘粒子的种类的传感器,从而能够按照尺寸来准确地测量各种尺寸的灰尘粒子的灰尘传感器。
43.另外,本发明的灰尘传感器配置有空气流路p并且在各个空气流路p配置有不同种类的传感器以能够按照各灰尘粒子的尺寸来准确地测量。
44.更详细地说,本发明的灰尘传感器包括至少两个感测模块。在感测模块中,第一感测模块130检测相对较大的灰尘粒子,第二感测模块140检测相对较小的灰尘粒子。因此,能够测量存在于空气中的各种尺寸的灰尘粒子。
45.近年来,包含在空气中的灰尘粒子的分类随着测量技术的发展被细分化。近年来,被分类为pm10、pm2.5、pm1.0,分类的pm中主要以pm2.5进行研究。
46.pm10是直径为10um以下的灰尘粒子。pm10用英文称作coarse particulate matter(粗颗粒物)。pm10可以通过红外线灰尘传感器或led灰尘传感器来检测。但是,在激
光灰尘传感器的情况下,由于相比于pm10的灰尘粒子的尺寸,光的照射范围较窄,因此存在无法准确地检测pm10灰尘的问题。
47.pm2.5是直径为2.5um以下的灰尘粒子。pm2.5用英文称作fine particulate matter(细颗粒物),在韩国,通常被分类为微尘。pm2.5可以通过红外线灰尘传感器或led灰尘传感器来检测。但是,在红外线灰尘传感器或led灰尘传感器的情况下,由于信号随着范围内的灰尘粒子的总量而增减,因此存在难以检测每个灰尘的数量或尺寸的问题。在激光灰尘传感器的情况下,虽然在测量pm2.5的灰尘粒子时存在微小的误差,但是在一定程度上能够准确地检测。
48.pm1.0是直径为1.0um以下的灰尘粒子。pm1.0用英文称作ultra-fine particulate matter(超细颗粒物),在韩国,通常被分类为超微尘。由于pm1.0的粒子尺寸非常小,因此存在难以通过红外线灰尘传感器或led灰尘传感器来检测的问题。但是,对应于pm1.0的超微尘可以通过激光灰尘传感器来检测。
49.本发明的灰尘传感器设置有各种感测模块。
50.根据一实施例,第一感测模块130可以是红外线灰尘传感器或led灰尘传感器。第一感测模块130不能检测pm1.0的超微尘,但能够检测pm10或pm2.5的灰尘。
51.另外,第二感测模块140可以是激光灰尘传感器。第二感测模块140存在检测pm10的大灰尘时产生较大的误差的问题,但能够准确地检测pm2.5或pm1.0的灰尘。
52.在本发明的灰尘传感器中,设置有检测pm2.5~pm10的相对较大的尺寸的灰尘粒子的第一检测传感器和检测pm2.5以下的相对较小的尺寸的灰尘粒子的第二检测传感器,从而能够一次性准确地判断包含在空气中的各种范围的灰尘。
53.本发明的灰尘传感器是通过照射光来检测灰尘的光学式传感器。光学式传感器通过检测照射的光与灰尘碰撞而反射、衍射或散射的光的角度或强度来测量灰尘的尺寸或量。涉及光的反射/衍射/散射的理论有很多,但目前主要讨论夫琅禾费理论或米氏散射理论/瑞利散射理论等。
54.夫琅禾费(fraunhofer)理论是在粒子受到激光照射的情况下衍射的角度随着粒子的尺寸而不同的理论。例如,如果尺寸较大的灰尘粒子被激光照射,则会以较小的角度衍射出强光,如果尺寸较小的灰尘粒子被激光照射,则会以较大的角度衍射出弱光。
55.米氏(mie)散射理论是在散射光的粒子的尺寸和入射的光的波长相似的情况下发生的散射。瑞利(rayleigh)散射理论是在散射光的粒子尺寸比入射的光的波长小得多的情况下发生的散射。散射参数与粒子尺寸成比例,与光的波长成反比。根据米氏散射理论,在粒子的尺寸较大的情况下,光相比前方偏向后方散射。与此相反,根据瑞利散射理论,在粒子的尺寸较小的情况下,光均匀地散射到前方和后方。
56.根据上述的理论,衍射角度、散射角度或光的强度根据灰尘粒子的尺寸而不同。例如,在灰尘粒子的尺寸较大的情况下,散射或衍射的光的角度窄,光的强度相对较强。与此相反,在灰尘粒子的尺寸较小的情况下,散射或衍射的光的角度宽,光的强度相对较弱。在空气中灰尘粒子的密度大的情况下,散射或衍射的光的角度变宽。受光构件可以根据检测到的光的角度变化或光的强度来检测灰尘粒子的尺寸和密度。
57.参照图1,本发明的灰尘传感器是对大气照射光,并且通过检测出照射的光被微尘反射的光来检测存在于大气中的灰尘粒子的传感器。灰尘传感器具有照射光的发光构件和
检测光的受光构件。另外,可以包括在受光构件的前端聚集光的聚光透镜和产生空气流动的送风模块。
58.发光构件向空气中照射光。参照图1,本发明的发光构件包括对第一流路p1照射第一光的第一发光构件131和对第二流路p2照射第二光的第二发光构件141。照射的光与灰尘粒子碰撞,可以被反射,可以被散射,也可以被衍射。发光构件可以照射各种光。发光构件可以照射红外线光,可以照射可视光线区域的光,也可以照射激光。
59.受光构件检测被反射、被散射或被衍射的光。参照图1,本发明的受光构件包括:第一受光构件132,在第一流路p1检测第一光;以及第二受光构件142,在第二流路p2检测第二光。受光构件根据检测光的光的强度,输出与灰尘浓度对应的电信号。
60.受光构件与发光构件照射光的范围错开配置。因此,在空气中没有灰尘而光没有被散射的情况下,受光构件不能检测到光,只有在空气中存在灰尘而光被散射时,受光构件才能够检测到光。
61.受光构件可以是光电二极管(photo diode),输出与检测到的光对应的电信号。换句话说,受光构件输出与灰尘浓度对应的电信号。
62.灰尘传感器可以包括聚光透镜。聚光透镜聚集从发光构件照射并被空气中的灰尘粒子散射的光。虽然并未图示,但参照图2,聚集第一光的第一聚光透镜可以配置在灰尘粒子和第一受光构件132之间,参照图4,聚集第二光的第二聚光透镜可以配置在灰尘粒子和第二受光构件142之间。
63.设置在灰尘传感器的送风模块可以是加热器或送风风扇120。加热器运转后,加热的空气会上升。存在于空气流路p上的灰尘粒子因加热器产生的热量而上升。当上升的灰尘粒子到达发光构件的光照射范围时,使照射的光散射。或者将送风风扇120配置到灰尘传感器,从而可以产生空气流动。
64.参照图1,本发明的灰尘传感器可以具有送风风扇120。送风风扇120通过使风扇和马达运转来产生空气流动。
65.虽然并未图示,但本发明的灰尘传感器可以具有加热器。运转加热器后,加热的空气会上升。存在于空气流路p上的灰尘粒子因加热器产生的热量而上升。当上升的灰尘粒子到达发光构件的光照射范围时,使照射的光发生散射。
66.第一感测模块130可以是照射可视光线区域的光的led灰尘传感器。第一感测模块130是通过对大气照射第一光并检测被微尘反射的光来检测大气中的灰尘粒子的传感器。第一感测模块130配置在空气流路p上并检测空气中的灰尘粒子。
67.参照图2,第一感测模块130包括第一发光构件131和第一受光构件133。
68.第一发光构件131对空气照射第一光。照射的第一光与灰尘粒子碰撞,可以被反射,可以被散射,也可以被衍射。
69.第一受光构件133检测被反射、被散射或被衍射的第一光。第一受光构件133接收第一光并输出与灰尘浓度对应的电信号。
70.第一受光构件133可以是检测可视光线区域的光的光电二极管,输出与检测到的光对应的电信号。换句话说,第一受光构件133输出与灰尘浓度对应的电信号。
71.第一感测模块130可以包括聚光透镜。聚光透镜聚集从第一发光构件131照射并被空气中的灰尘粒子散射的光。
72.参照图3,在第一感测模块130的情况下,通过测量散射的光的强度,输出基于光的强度的电信号。在第一感测模块130的情况下,以存在于范围内的所有灰尘尺寸的总和形式输出,示出为值彼此连接的模拟形态的曲线。
73.在第一感测模块130的情况下,虽然光的强度弱,但是能够检测的区域较宽,因此有利于测量大的灰尘粒子。相反地,存在因精度下降而无法测量较小尺寸的灰尘粒子的缺点。
74.另外,在第一感测模块130的情况下,由于信号输出示出为随着时间而连续的模拟形态,因此存在无法区分每个灰尘粒子的缺点。另外,由于可能会掺杂自然光,因此存在可能包含噪音的缺点。
75.根据本发明,第一感测模块130检测2.5um以上的相对较大的灰尘粒子。
76.第二感测模块140可以是照射激光的激光灰尘传感器。激光灰尘传感器是通过对空气照射激光并检测被微尘反射的光,来检测大气中的灰尘粒子的传感器。第二感测模块140配置在空气流路p上,检测空气中的灰尘粒子。
77.第二感测模块140配置在比第一感测模块130更下游的位置。第二感测模块140检测比第一感测模块130检测的灰尘粒子更小尺寸的灰尘粒子。例如,第二感测模块140可以检测2.5um以下的相对较小的尺寸的灰尘粒子。
78.参照图5,第二感测模块140包括第二发光构件141和第二受光构件143。
79.第二发光构件141对空气照射激光。照射的激光与灰尘粒子碰撞而被反射、被衍射或被散射。
80.第二受光构件143检测被反射、被衍射或被散射的激光。第二受光构件143可以通过测量激光的角度变化来计算灰尘粒子的尺寸。
81.参照图6,在第二感测模块140的情况下,可以根据第二受光构件143检测到的光的强度来检测尺寸,也可以通过测量到达第二受光构件143的光的角度变化来检测灰尘粒子的尺寸。第二发光构件141针对各个灰尘进行输出,示出为值没有彼此连接的数字形态的曲线。
82.在第二感测模块140的情况下,由于能量密度高,因此相比于上述的第一感测模块130具有有利于尺寸较小的灰尘粒子的测量的优点。相反,由于能够检测的区域窄,因此存在不利于尺寸较大的灰尘粒子的测量的缺点。
83.由于第二感测模块140按每个灰尘粒子显示输出,因此具有能够比第一感测模块130更准确地检测灰尘的数量和尺寸的优点。但是,由于照射范围窄,因此存在难以准确地检测pm10等过大的粒子的灰尘的缺点。
84.尤其,参照图6,可以知晓第二感测模块140在检测pm10时准确度会下降。参照图6,颜色较深的曲线是示出随着时间的第二感测模块140的测量值,颜色较浅的曲线是示出随着时间实际测量的灰尘的测量值。即,在pm1.0或pm2.5中,由于第二感测模块140的测量结果与实际灰尘的测量值显示为近似的图形,因此可以知晓确保了一定的准确性。但是,在pm10中,由于第二感测模块140的测量结果与实际灰尘的测量值显示为较大差异的图形,因此可以知晓第二感测模块140在pm10中准确度会降低。这表示,由于第二感测模块140的光照射范围窄而灰尘粒子的尺寸非常大,因此第二感测模块140无法准确地掌握灰尘的尺寸。
85.本发明的灰尘传感器包括外壳110。外壳110形成灰尘传感器的外形,在内部形成
有配置构成要素的空间。外壳110在内部形成有使空气流动的空气流路p。
86.外壳110包括空气吸入口111。空气吸入口111是使要感测的空气流入外壳110的内部的构成要素。空气吸入口111配置在外壳110的一侧,可以贯通外壳110的壁而形成。空气吸入口111与空气流路p的一端连接,更详细地说,与空气流路p中第一流路p1的入口端连通。
87.外壳110包括空气吐出口113。空气吐出口113是使在外壳110内部的结束感测的空气向外部吐出的构成要素。空气吐出口113配置在外壳110的一侧,可以贯通外壳110的壁而形成。空气吐出口113与空气流路p的一端连接,更详细地说,与空气流路p中第三流路p3的出口端连通。
88.参照图1,空气吸入口111和空气吐出口113配置在外壳110的一侧。但是,并不限定于此,在本领域普通技术人员能够容易地变更的范围内,可以隔开配置在一侧和另一侧。
89.空气吸入口111的尺寸可以小于空气吐出口113的尺寸。
90.参照图1,空气流路p形成在外壳110的内部,一端与空气吸入口111连接,另一端与空气吐出口113连接。
91.在空气流路p上配置有送风风扇120,并产生空气流动。在空气流路p上配置有第一感测模块130和第二感测模块140,并且可以检测存在于流动空气的灰尘粒子。
92.空气流路p包括第一流路p1、第二流路p2以及第三流路p3。第一流路p1至第三流路p3彼此连通。第一流路p1至第三流路p3的空气流动方向可以彼此不同。
93.第一流路p1是使吸入到灰尘传感器的内部的空气流动,并检测包含在吸入的空气中的灰尘粒子的构成要素。第一流路p1的入口端与空气吸入口111连通,出口端与第二流路p2连通。
94.第一流路p1的空气流动方向与第二流路p2的空气流动方向不同。第一流路p1和第二流路p2配置成不平行。
95.在第一流路p1配置有第一感测模块130。第一感测模块130配置在第一流路p1上并检测空气中的灰尘粒子。
96.第一流路p1可以向下延伸形成。即,第一流路p1的上端可以与空气吸入口111连通,第一流路p1的下端可以与第二流路p2连通。第一流路p1向下延伸,灰尘可以根据送风风扇120的负压流动,也可以根据重力流动。
97.第一流路p1可以区分为第一上部流路p11和第一下部流路p12。第一上部流路p11的入口端与空气吸入口111连通,出口端与第一下部流路p12的入口端连通。第一上部流路p11可以形成为具有恒定的截面积。第一感测模块130优选配置于第一上部流路p11。第一下部流路p12的入口端与第一上部流路p11连通,出口端与第二流路p2连通。第一下部流路p12可以形成为出口端的截面积的尺寸小于入口端的截面积的尺寸。即,第一下部流路p12的截面积可以逐渐减小。根据流体的连续定理,相比于第一下部流路p12的入口端,第一下部流路p12的出口端的空气流速增加,包含在空气的灰尘具有更大的惯性力,从第一流路p1和第二流路p2之间的第一弯曲流路p4脱离的概率增加。
98.第一下部流路p12可以在出口端的截面积的尺寸变得小于入口端的截面积的尺寸的方向上形成倾斜面。
99.第一下部流路p12的外侧壁可以与配置在第一上部流路p11的外侧的壁平行地配
置。优选,第一下部流路p12的外侧壁可以与第一上部流路p11的空气流动方向平行,第一下部流路p12的内侧壁可以在出口端靠近外侧壁的方向上形成倾斜面。因此,第一上部流路p11的空气流动方向在与外侧壁平行的方向上流动的情况下,第一下部流路p12的空气流动方向不与第一上部流路p11的空气流动方向平行,而是相比第一上部流路p11的空气流动方向逐渐偏向外侧流动。因此,使在弯曲流路p4施加到灰尘粒子的向心力最大化。
100.参照图1和图2,第一感测模块130是配置在空气流路p上并且检测空气中的灰尘粒子的构成要素。更详细地说,第一感测模块130配置在第一流路p1上。
101.第一感测模块130可以检测比第二感测模块140能够检测的灰尘粒子的尺寸更大的灰尘粒子。例如,第二感测模块140在pm2.5的范围内准确地检测2.5um以下的灰尘粒子而不能准确地检测2.5um以上的灰尘粒子,但是第一感测模块130可以较准确地检测2.5um以上的灰尘粒子。
102.第一感测模块130包括照射第一光的第一发光构件131。第一发光构件131配置在空气流路p的侧面,并从侧方照射第一光。更详细地说,第一发光构件131配置在第一流路p1的侧面。例如,如果空气流动方向为z轴方向,则第一发光构件131可以在y轴方向上照射第一光。
103.第一光可以是测量范围宽的光,也可以是长波长的光,以便比第二光更准确地检测大的灰尘。第一光可以是可视光线区域的光,也可以从led照射。
104.优选,第一发光构件131配置在第一流路p1的内侧,可以向外侧照射第一光。第一流路p1的内侧对应于第一流路p1的靠近第三流路p3的一侧。即,第一发光构件131可以配置在第一流路p1和第三流路p3之间。
105.第一感测模块130包括检测第一发光构件131照射的第一光的第一受光构件133。第一受光构件133配置在空气流路p的侧面,更详细地说,配置在与第一发光构件131的照射方向和空气流动方向均交叉的方向上。例如,当空气流动方向是z轴方向且第一发光构件131在y轴方向上照射第一光时,第一受光构件133配置在x轴方向上,从而检测从y轴方向上照射的第一光散射的一部分。
106.优选,第一受光构件133可以配置在第一流路p1的背面。第二受光构件143可以与第一受光构件133同样地配置在第二流路p2的背面。例如,作为第一种情况,如本发明所示,第一发光构件131和第二发光构件141可以配置在空气流路p的内侧,第一受光构件133和第二受光构件143可以配置在空气流路p的后方。作为第二种情况,第一受光构件133和第二受光构件143可以配置在内侧,第一发光构件131和第二发光构件141可以配置在空气流路p的后方。在第二种情况下,由于第一发光构件131和第二发光构件141平行地照射,存在随着被散射/衍射/反射导致光混合而使准确性降低的问题。与此相反,第一种情况是第一发光构件131和第二发光构件141在彼此远离的方向上照射,因此具有即使被散射/衍射/反射,光也几乎不可能彼此干扰的优点。
107.第一感测模块130可以包括第一聚光透镜。第一聚光透镜可以配置在第一受光构件133的入口端。由于led光的强度一般弱于激光的强度,因此第一聚光透镜使朝第一受光构件133的led光的强度增加。
108.在第一流路p1和第二流路p2之间可以形成有第一弯曲流路p4。在第一流路p1和第二流路p2之间以特定的曲率半径形成有第一弯曲流路p4,曲率半径可以根据实验确定为使
向心力最大的值。
109.第一弯曲流路p4的入口端与第一流路p1的出口端连通,第一弯曲流路p4的出口端与第二流路p2的入口端连通。第一流路p1和第二流路p2的空气流动方向彼此不同,优选,第一流路p1和第二流路p2的空气流动方向可以正交。
110.灰尘粒子在第一流路p1的流动方向和在第二流路p2的流动方向彼此不同,粒子较大的灰尘粒子根据惯性力与第一弯曲流路p4的外侧壁碰撞,并堆积在第一弯曲流路p4的外侧壁而不能在第二流路p2流动。但是,粒子较小的灰尘粒子惯性力小,因此不会与第一弯曲流路p4的外侧壁碰撞,可以在第二流路p2流动。
111.从第一弯曲流路p4的入口端流入的空气和包含在空气中的灰尘粒子受到由送风风扇120产生的负压的力。另外,灰尘粒子受重力影响,在重力的方向和空气流动方向一致的情况下,施加在灰尘粒子的合力(net force)会进一步上升。合力与惯性力相同,在第一流路p1向下延伸的情况下,灰尘粒子所具有的惯性力进一步上升,在第一弯曲流路p4过滤后的灰尘粒子的尺寸也越来越小,从而具有在第二流路p2检测的准确性也进一步上升的效果。
112.在第一弯曲流路p4中,空气和包含在空气中的灰尘粒子回旋流动。回旋的灰尘粒子在径向上受向心力。灰尘粒子在与上述的惯性力相同的方向上受到向心力,在第一弯曲流路p4过滤后的灰尘粒子的尺寸也越来越小,因此,具有在第二流路p2检测的准确性也进一步上升的效果。
113.在第一弯曲流路p4可以配置有尘塞150。在第一弯曲流路p4的外侧壁的一部分贯通形成有孔,通过该孔,可以清洁堆积在第一弯曲流路p4的灰尘粒子。尘塞150插入到第一弯曲流路p4的外侧壁。尘塞150在灰尘传感器运转时封闭孔,在清洁灰尘传感器时被去除,从而能够清洁堆积在第一弯曲流路p4的灰尘粒子。
114.第一流路p1是使已通过第一流路p1的空气流动,以测量更微小的灰尘粒子的构成要素。第二流路p2的入口端与第一流路p1连通,出口端与第三流路p3连通。在第二流路p2与第一流路p1的连接部或第二流路p2与第三流路p3的连接部可以配置有弯曲流路。
115.在第二流路p2配置有第二感测模块140。第二感测模块140配置在第二流路p2上,并检测空气中的灰尘粒子中更微小的尺寸的粒子。
116.第二流路p2在与第一流路p1的延伸方向不同的方向上延伸。例如,在第一流路p1沿上下方向延伸的情况下,第二流路p2可以沿左右方向延伸。
117.第二流路p2可以横向延伸形成。第二流路p2可以在水平方向上延伸。第二流路p2横向配置而排除了重力的影响,并且提高了检测尺寸较小的灰尘粒子的准确性。
118.第二流路p2具有规定的截面形状。第二流路p2具有规定的截面形状,使空气流速恒定,并且提高了检测尺寸较小的灰尘粒子的准确性。
119.第二流路p2的截面积可以小于第一流路p1的截面积。因此,第二流路p2中的空气流速比第一流路p1中的空气流速更快。由于第二光具有比第一光更短的波长,因此即使空气流速快也能够准确地测量,并且考虑到第二光比第一光的能耗更多,可以通过缩短照射第二光的时间来节省能量。
120.参照图1和图4,第二感测模块140是配置在空气流路p上,并检测空气中的灰尘粒子的构成要素。更详细地说,第二感测模块140配置在第二流路p2上。
121.第二感测模块140检测尺寸比第一感测模块130检测的灰尘粒子更小的灰尘粒子。例如,第二感测模块140能够准确地检测pm2.5,即2.5um以下的灰尘粒子。
122.第二感测模块140包括照射第二光的第二发光构件141。第二发光构件141配置在空气流路p的侧面,并从侧方照射第二光。更详细地说,第二发光构件141配置在第二流路p2的侧面。例如,如果空气流动方向为y轴方向,则第二发光构件141可以在z轴方向上照射第二光。
123.第二光可以是短波长的光,以便能够比第一光检测更小的灰尘。第二光可以是激光。
124.优选,第二发光构件141可以配置在第二流路p2的内侧,可以向外侧照射第二光。第二流路p2的内侧对应于第二流路p2的靠近第一流路p1和第三流路p3的一侧。即,第二发光构件141可以配置在第一流路p1和第二流路p2之间。
125.第二感测模块140包括检测第二发光构件141照射的第二光的第二受光构件143。第二受光构件143配置在空气流路p的侧面,更详细地说,配置在与第二发光构件141的照射方向和空气流动方向均交叉的方向上。例如,在第二流路p2中,当空气流动方向为y轴方向且第二发光构件141在z轴方向上照射第二光时,第二受光构件143配置在x轴方向,从而检测从z轴方向上照射的第二光中被散射/衍射/反射的一部分。
126.优选,第二受光构件143可以配置在第二流路p2的背面。通过第二受光构件143和第一受光构件133配置在空气流路p的背面,在空间上,第二发光构件141和第一发光构件131可以配置在空气流路p的内侧。因此,第二发光构件141和第一发光构件131配置在空气流路p的内侧,并且向外侧以彼此远离地照射光,从而能够防止第一光和第二光的干扰。
127.第二感测模块140可以包括第二聚光透镜。
128.第二感测模块140配置在比第一感测模块130更下游的位置。
129.第二感测模块140检测尺寸比第一感测模块130检测的灰尘粒子更小的灰尘粒子。第二感测模块140在比第一感测模块130能够检测的范围更窄的范围内,检测尺寸比第一感测模块130能够检测的灰尘粒子的尺寸更小的灰尘粒子。即,第二感测模块140具有能够检测尺寸比第一感测模块130检测的灰尘粒子更小的灰尘粒子的优点。但是,在检测相对较大的尺寸的灰尘粒子的情况下,存在准确度下降的缺点。此外,当流入尺寸比第二灰尘传感器能够检测的范围更大的灰尘粒子的情况下,存在无法检测灰尘粒子的问题。
130.因此,如果第二感测模块140配置在比第一感测模块130更下游的位置,并在第二感测模块140和第一感测模块130之间去除尺寸较大的灰尘粒子,则在第一感测模块130能够检测较大尺寸的灰尘粒子,而在第二感测模块140能够检测尺寸较小的灰尘粒子。即,可以通过使灰尘粒子的测量二元化,在空间上分离测量空间,使灰尘粒子的测量范围大幅上升。
131.更详细地说,在第二感测模块140和第一感测模块130之间形成有第一弯曲流路p4。由于惯性力、重力或向心力,粒子较大的灰尘在第一弯曲流路p4的外侧壁被过滤并堆积。因此,在第二感测模块140只有尺寸较小的灰尘粒子流动,从而能够只准确地测量尺寸较小的灰尘粒子。
132.第三流路p3是将测量完毕的空气通过空气吐出口113排出至灰尘传感器的外部的构成要素。第三流路p3的入口端与第二流路p2连通,出口端与空气吐出口113连通。
133.第三流路p3可以与第一流路p1相对地配置。即,在第一流路p1的空气流动方向为向下的情况下,在第三流路p3的空气流动方向可以是向上。第一流路p1、第二流路p2以及第三流路p3可以形成为“u”字形状。
134.第一发光构件131或第二发光构件141可以配置在第一流路p1和第三流路p3之间。第一发光构件131可以配置在空气流路p的内侧并向第一流路p1照射第一光,第二发光构件141可以配置在空气流路p的内侧并向第二流路p2照射第二光。第一光的照射方向与第二光的照射方向彼此不同,配置成逐渐远离第二光的照射方向,因此具有照射的第一光和第二光不可能彼此干扰的效果。另外,由于第一发光构件131和第二发光构件141配置在同一pcb板,因此发光构件在外壳110的内部所占的空间小,从而还具有能够有效地利用外壳110的空间的优点。
135.在第三流路p3配置有送风风扇120。送风风扇120通过对空气流路p提供负压来使空气流动。
136.第三流路p3可以向上延伸形成。第三流路p3的出口端的截面积可以大于入口端的截面积。但是,并不限定于此,可以在普通技术人员能够容易采用的范围内对第三流路p3进行变更。
137.第三流路p3的出口端的截面积可以大于第一流路p1的入口端的截面积。送风风扇120偏向空气吐出口113侧配置,设计成第一流路p1的入口端的截面积小于第三流路p3的出口端的截面积,从而能够在第一流路p1的入口端确保规定以上的风量和正压。
138.在第二流路p2和第三流路p3的连接部可以形成有弯曲流路p5。在第二流路p2的出口端和第三流路p3的入口端可以连接有第二弯曲流路p5。第二弯曲流路p5的出口端的截面积可以大于第二弯曲流路p5的入口端的截面积。第二弯曲流路p5转换从第二流路p2流入的空气的空气流动方向并引导至第三流路p3。第二弯曲流路p5的出口端的截面积大于第二弯曲流路p5的入口端的截面积,从而降低压力并防止灰尘粒子的沉淀。
139.送风风扇120是产生空气流动的构成要素。送风风扇120配置在空气流路p上,使存在于灰尘传感器外部的空气通过空气流入口流入外壳110的内部,使空气在空气流路p上流动,通过空气吐出口113吐出到外壳110的外部。
140.参照图1,送风风扇120配置在空气流路p上。更详细地说,送风风扇120配置在第三流路p3上。
141.送风风扇120可以是横流风扇。横流风扇使空气在径向上流入,并在径向上吐出空气(120)。横流风扇具有均匀地吐出空气的特征。本发明的送风风扇120构成为横流风扇,使流路上的空气以均匀的速度流动,从而能够准确地检测灰尘粒子。
142.参照图1,送风风扇120相比于空气吸入口111更偏向空气吐出口113而配置。送风风扇120可以配置在空气吸入口111,并通过正压使空气流路p内的空气流动,可以配置在空气吐出口113,并通过负压使空气流路p内的空气流动。本发明的送风风扇120配置在空气吐出口113,并通过负压使空气流动,与由正压产生的空气流动相比,具有能够使空气流路p内的空气以均匀的速度流动的效果。
143.如上所述,说明本发明的灰尘传感器的作用如下。
144.存在于灰尘传感器的外部的空气通过空气吸入口111流入灰尘传感器的内部,在通过形成在灰尘传感器的内部的空气流路p的同时,测量灰尘粒子尺寸和浓度,通过空气吐
出口113排出至灰尘传感器的外部。
145.空气通过空气吸入口111流入灰尘传感器的内部,在与空气吸入口111连通的第一流路p1流动。空气包含各种尺寸的灰尘粒子。在第一流路p1配置有第一感测模块130,第一感测模块130检测各种尺寸的灰尘粒子中相对较大的灰尘粒子。例如,第一感测模块130主要检测2.5um以上的灰尘粒子。
146.第一流路p1可以向下延伸形成。第一流路p1在空气流动方向上受到重力,惯性力增加,在第一弯曲流路p4中使粒子较大的灰尘粒子与壁碰撞,从而有效地捕集粒子较大的灰尘粒子。
147.第一流路p1可以区分为截面积的尺寸恒定的第一上部流路p11和截面积的尺寸逐渐减小的第一下部流路p12。由于第一上部流路p11的截面积的尺寸恒定,因此流速慢且恒定,第一感测模块130能够准确地检测灰尘粒子。由于第二下部流路的截面积的尺寸逐渐减小,因此流速逐渐加快,通过赋予惯性力,在第一弯曲流路p4中使粒子较大的灰尘粒子与壁碰撞,从而有效地捕集粒子较大的灰尘粒子。
148.第一下部流路p12形成有内侧壁向外侧壁逐渐靠近的倾斜面,截面积的尺寸减小,在第一流路p1中空气流动方向逐渐偏向外侧。因此,在第一弯曲流路p4中向心力增加,使粒子较大的灰尘粒子与壁碰撞,从而有效地捕集粒子较大的灰尘粒子。
149.通过了第一流路p1的空气在第一弯曲流路p4流动。空气在第一弯曲流路p4流动,并且空气流动方向变更。包含在空气中的灰尘粒子中尺寸较大的灰尘粒子通过惯性力、重力或向心力,与第一弯曲流路p4的外侧壁碰撞并被捕集。尺寸较小的灰尘粒子不会与第一弯曲流路p4的外侧壁碰撞,而是向第二流路p2流动。因此,可以仅尺寸相对较小的灰尘粒子在第二流路p2流动。
150.通过了第一弯曲流路p4的空气在第二流路p2流动。包含在空气中的灰尘粒子中尺寸较大的灰尘粒子大部分在第一弯曲流路p4被捕集,尺寸较小的灰尘粒子流入第二流路p2。在第二流路p2配置有第二感测模块140,第二感测模块140检测各种尺寸的灰尘粒子中相对较小的灰尘粒子。例如,第二感测模块140主要检测2.5um以下的灰尘粒子。由于相对较大的灰尘粒子大部分在第一弯曲流路p4被捕集,因此第二感测模块140准确地检测微小的尺寸的灰尘粒子,提高准确性。
151.通过了第二流路p2的空气在第二弯曲流路p5流动。由于第二弯曲流路p5的截面积随着接近出口端而逐渐增大,因此压力减小,包含在空气中的灰尘粒子不会沉淀而向第三流路p3流动。
152.通过了第二弯曲流路p5的空气在第三流路p3流动。流入到第三流路p3的空气经由送风风扇120并通过空气吐出口113吐出到灰尘传感器的外部。
153.以上,尽管图示并说明了本发明的优选实施例,但是,本发明不限于上述特定的实施例,在不脱离权利要求书所要求的本发明的要旨的范围内,本发明所属领域的普通技术人员可以进行各种变形实施,并且这些变形实施不能从本发明的技术思想或前景来单独理解。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1