多轴差动应变传感器的制作方法
多轴差动应变传感器
1.相关申请的交叉引用
2.本专利申请要求于2020年6月12日提交的美国临时申请序列号63/038,547的优先权的权益,该美国临时申请通过引用以其整体并入。
3.背景
4.应变传感器可以测量应变传感器上的机械或其他物理刺激,例如借助于应变传感器已经被放置在其上的基板,从而测量基板上的应变。传递到应变传感器的基板中的变形,诸如拉伸、扭曲、挠曲等,可以使应变传感器的一些物理性质发生变化。物理性质的变化可以转化为应变,并用于识别应变随时间的变化。
5.附图的几个视图的简要描述
6.为了容易标识任何特定元素或动作的讨论,附图标记中的一个或更多个最高有效数字是指该元素被首次引入的图号。
7.图1是示例实施例中的柔性差动应变传感器的框图。
8.图2是示例实施例中的柔性差动应变传感器的拓扑结构。
9.图3是示例实施例中的柔性差动应变传感器的电气等效示意图。
10.图4a和图4b在示例实施例中示出了可通过其形成柔性差动应变传感器的拓扑结构的过程的抽象表示。
11.图5是示例实施例中的柔性差动应变传感器的框图。
12.图6是示例实施例中的三维柔性差动应变传感器的拓扑结构。
13.详细描述
14.例如,在2018年8月30日公布的美国专利申请公开号2018/0247727(“'727申请”)中已经公开了柔性应变传感器,该美国专利申请通过引用以其整体并入本文。'727申请例如在图7-图10以及段落[0014]至[0017]和段落[0089]至[0120]等中公开了用于利用可变形导体(例如导电凝胶)进行应变感测的方法、装置和示例实施例。如'727申请中所公开的,传感器系统包括通过改变尺寸(例如拉伸)来响应刺激的传感器元件。在'727申请中,例如在段落[00116]中公开的示例可以包括可变电阻器网格图案和/或未连接或稀疏连接的可变电阻器网络。
[0015]
本文公开了柔性差动应变传感器,其可用于通过将传感器元件布置成图案来测量和区分在两个或更多个维度上(例如,沿着两个不同的轴)发生的刺激。本文公开的示例可以利用差分信号处理来提供沿基板的特定轴的应变。因此,这种柔性差动应变传感器可以提供对基板和/或应变传感器上的应变的本质(nature)的相对增强的灵敏度。
[0016]
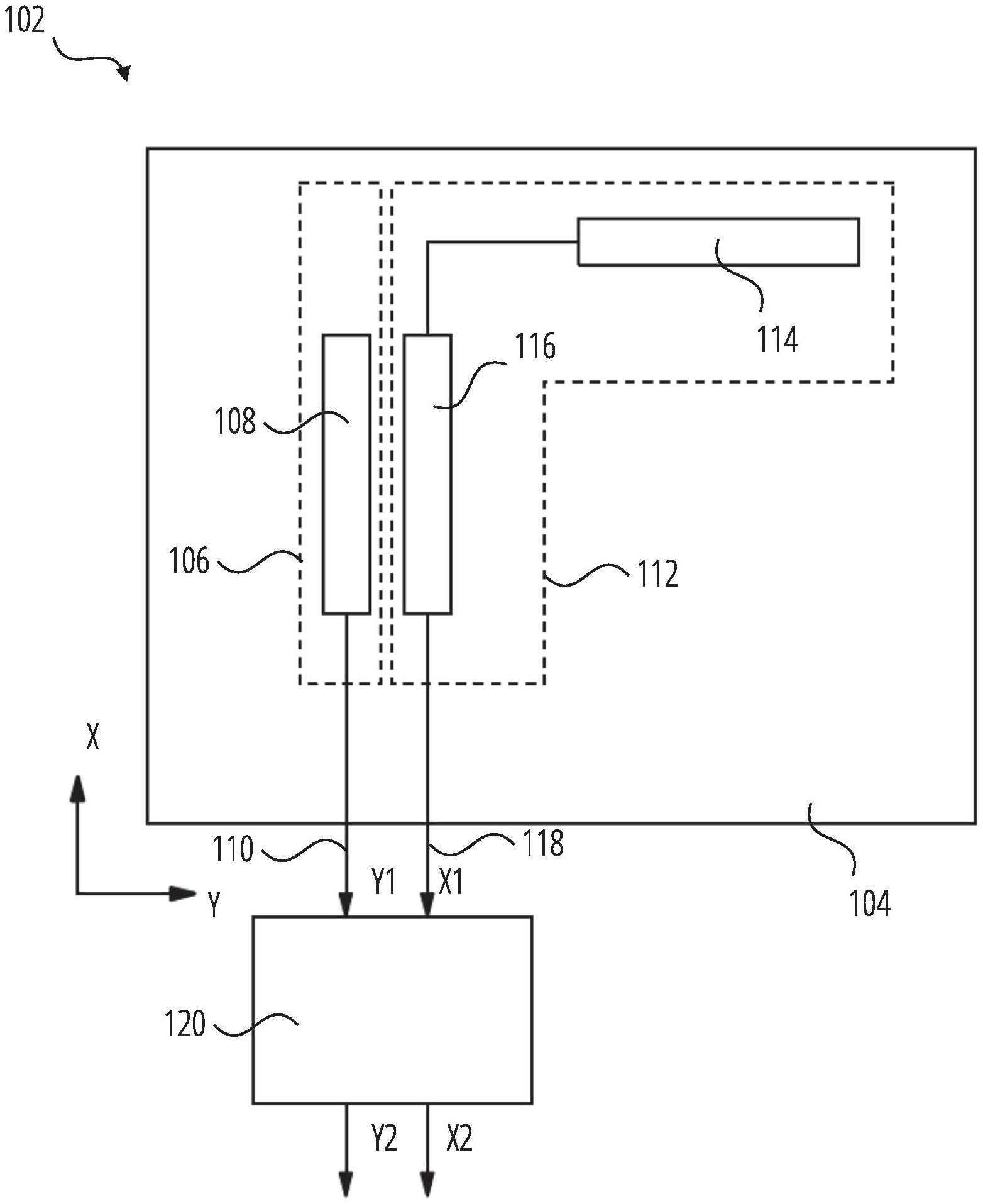
图1是示例实施例中的柔性差动应变传感器的框图。柔性差动应变传感器102被配置成检测可变形基板104上的应变,并且特别是沿着可变形基板104的x轴和y轴的应变。可变形基板104可以是本文公开的导电凝胶可以被定位并通常固定在其上或其内的任何物体。可变形基板104可以是或者可以包括天然纤维和合成纤维、天然橡胶或合成橡胶、弹性体等。此外,在各种替代示例中,柔性差动应变传感器102可以在这样的基板上实现,该基板旨在相对较小地变形(如果实在要变形的话),但允许柔性差动应变传感器102检测基板上
潜在的不期望的应变或变形。例如,基板可以是金属、碳纤维等,并且柔性差动应变传感器102通常可以用于识别这种结构上的应变。然而,在各种示例中,柔性差动应变传感器102用可变形基板104实现,在这种情况下,具有可变形基板104的柔性差动应变传感器102可以被放置在这种可相对较少变形的结构上并固定到该结构,以便确定这种结构上的应变。
[0017]
为了说明的目的,可变形基板104被有效地呈现为二维物体,其中应变被施加在x轴和y轴中的一个或两个上,并由恰好沿着x轴和y轴中的一个延伸的部件检测。然而,应当认识和理解的是,部件可以被定位成与x轴和y轴成角度,并且传统的数学方法可以被用来补偿或以其他方式考虑相对于x轴和y轴的角度差异。此外,应变可以在与x轴和y轴正交的z轴上施加在可变形基板104上,并且柔性差动应变传感器102可以对这种应变敏感。此外,如将在本文示出的,二维示例中示出的原理可以应用于三维示例,其中应变传感器沿着可变形基板104的z轴定位并被配置为直接感测施加在z轴上的应变。
[0018]
柔性差动应变传感器102可以包括第一感测元件106,该第一感测元件106具有第一有源部分108,该第一有源部分108被布置成感测沿y轴(例如第一轴)的应变。第一端子110提供来自第一感测元件106的电输出。第二感测元件112可以具有第二有源部分114和抵消部分116,其中第二端子118提供来自第二感测元件112的电输出。第二有源部分114可以定位在可变形基板104上,以感测沿x轴(例如第二轴)的应变,并且抵消部分116可以定位在可变形基板104上,以逻辑上或数学上抵消掉由第一感测元件106的第一有源部分108检测到的沿y轴的应变。因此,第一感测元件106可以对y轴上的应变敏感,但对x轴上的应变不怎么敏感或不敏感。相反,第二感测元件112可以对施加在x轴和y轴两者上的应变敏感。在一些示例中,通过将抵消部分116布置成物理上接近第一有源部分108,抵消部分116沿y轴经受与第一有源部分108相同或几乎相同的应变。
[0019]
在各种示例中,第一感测元件106和第二感测元件112均由导电凝胶形成,如本文所公开的。导电凝胶可以通过任何合适的工艺被定位在可变形基板104上或可变形基板104内,包括印刷、分散到可变形基板104的细丝(filament)和空隙中,等等。导电凝胶可以被实现为一根或更多根电迹线,该一根或更多根电迹线被配置成沿着迹线传导电流。导电凝胶的电性质可以随着导电凝胶拉伸、收缩或以其他方式(例如,随着应变施加在可变形基板104上并且通过延伸)变形而变化。在各种示例中,导电凝胶的给定迹线的阻抗(或更狭义地电阻)可以随着迹线拉伸、收缩或以其他方式变形而增大或减小。迹线的电阻的这种变化可以与在迹线附近被施加在可变形基板104上的应变的量一致。因此,第一有源部分108、第二有源部分114和抵消部分116可以被理解为是沿着可变形基板104的x轴和y轴中的相应一个延伸的电迹线的导电凝胶的特定部分。虽然导电凝胶的阻抗和/或其它电性质可随着导电凝胶变形而变化,但与电子器件中使用的常规导体相比,导电凝胶的脆性明显较小且不大可能断裂,且弹性明显较大。
[0020]
第一端子110上的y1和第二端子118上的x1这两个信号可以形成来自柔性差动应变传感器102的输出向量,以恢复和/或表示被施加到可变形基板104并通常施加到柔性差动应变传感器102的应变场。可以以任何合适的方式处理输出向量。例如,在一些应用中,原始信号x1和y1可以由信号处理单元120处理,以确定并输出施加在y轴上的应变作为输出信号y2,以及确定并输出施加在x轴上的应变作为输出信号x2。信号处理单元120可以包括用于确定端子110、118处的阻抗的欧姆表或其他仪器,以及处理器或其他计算电子器件,该处
理器或其他计算电子器件可以将阻抗或阻抗变化转换为柔性差动应变传感器102上的应变或以其他方式关联到柔性差动应变传感器102上的应变。例如,在示例实现中,由信号处理单元120检测到的阻抗和/或电阻中的0.03欧姆的变化相当于柔性差动应变传感器102的导电凝胶及由该导电凝胶形成的迹线上的一(1)毫米的应变,如本文所公开的。在各种示例中,应变可以理解为总长度的变化,尽管应该认识到并理解,可以附加地或替代地使用本领域已知的任何可行的应变度量。
[0021]
因为y1对y轴上的应变具有显著的敏感性,这是由于具有第一有源部分108,但不具有像第二有源部分114那样总体沿着x轴延伸的迹线,所以信号处理单元120可以通过将第一有源部分108的阻抗变化与y轴上的应变相关联来计算y轴上的应变,并将所得到的应变输出为y2。在各种示例中,信号处理单元120可以仅缓冲或传递信号y1作为输出信号y2,以提供应变的指示,并且远程处理单元、控制器或其他电子设备可以执行将阻抗变化与柔性差动应变传感器102上的应变相关联的操作。
[0022]
相反,由于第二感测元件112包括对x轴和y轴两者上的应变的显著灵敏度,信号处理单元120可以通过从来自x1的阻抗变化中减去来自y1的阻抗变化来生成输出信号x2,该输出信号x2指示沿第二感测元件112的x轴施加的应变。因此,信号处理单元120确定对阻抗的不同灵敏度,这基本上抵消掉了沿着y轴施加在第一有源部分108和抵消部分116上的应变,并使得x2主要或完全基于沿第二有源部分114的阻抗变化。应当认识到并理解,出于本公开的目的,虽然第一有源部分108和抵消部分116可以彼此非常接近地放置,并且由具有非常相似性质的导电凝胶迹线形成,但导电凝胶的实际定位的变化可能导致第一有源部分108和抵消部分116的阻抗变化之间的一定范围的误差,该误差可能通过在x2处输出的x轴上的应变的差分计算而传播。然而,应当认识到并理解,即使输出x2没有完全排除y轴上应变的影响,这种小的误差范围仍然可以产生x轴上的应变的有用和精确的表示。同样的原理也适用于输出y2。
[0023]
如上所述,输出向量的任何处理都可以用根据特定应用定制的方式来实现。通常,感测元件可以被布置成可以部分和/或完全连接的网格或阵列。这些元件可以生成值的输出向量,该向量可以被分析以提供由柔性差动应变传感器102单独地或与其他传感器组合地测量的可变形基板104上的应变场的表示。应变场的解释可以基于应用,应用的一些示例在下面进行描述。
[0024]
在其他实施例中,柔性差动应变传感器102可以以其他配置进行布置,并且使用不同数量和/或类型的感测元件、有源区域和/或抵消区域等。例如,感测元件可以被布置成t形、u形、s形、箱形(box shape)等。不同的元件和/或区域可以以不同于直角的角度(例如锐角和/或钝角)进行布置。感测元件可以被结合到任何任意图案中,并且信号处理可以被调整以适应不同的图案。在一些实施例中,信号处理可以提取复合信号,该复合信号指示一个维度上的刺激,同时抵消一个或更多个其他维度和/或轴上的应变。这些原理可应用于具有任意数量元件的柔性差动应变传感器102,每个元件具有任意数量的部分(有源部分和/或抵消部分),以用于任何类型的刺激,例如运动、应力、应变等。
[0025]
图2是示例实施例中的柔性差动应变传感器102的拓扑结构。具体地,该拓扑结构示出了导电凝胶电迹线202。迹线202如所示的那样大体定位在可变形基板104(未示出)上,以便产生图1中所示的柔性差动应变传感器102。迹线202包括y轴部分204a、204b、204c、
204d(这些部分可以被理解为是迹线202的大致沿y轴延伸的部分),以及大致沿x轴延伸的x轴部分206a、206b、206c。拓扑结构不一定代表y轴部分204a、204b、204c、204d和x轴部分206a、206b、206c的相对长度。
[0026]
迹线202耦合到或以其他方式形成第一节点208、第二节点210和第三节点212。第一节点208和第二节点210通常描述y1信号,由部分204a、206a、204b限定。第二节点210和第三节点212通常描述x1信号,并且由部分204b、206b、204d、206c和204c限定。因此,应当认识到,就实际拓扑结构而言,信号x1和y1都至少部分地受到迹线202的y轴部分204b的影响,并且沿着y轴部分204b的阻抗的变化可能导致对x1和y1两者的阻抗的变化。
[0027]
图3是示例实施例中的柔性差动应变传感器102的电气等效示意图。电气等效示意图包括对应于第一有源部分108的第一变阻器302、对应于第二有源部分114的第二变阻器304和对应于抵消部分116的第三变阻器306,所有这些变阻器都位于可变形基板104上。电气等效示意图还包括第一逻辑节点308和第二逻辑节点310,跨该第一逻辑节点308和第二逻辑节点310产生信号y1;以及第三逻辑节点312和第四逻辑节点314,跨该第三逻辑节点312和第四逻辑节点314产生信号x1。尽管本文讨论了变阻器,但应当认识到并理解,变阻器提供通常由迹线202的变形产生的可变阻抗,而不仅仅是狭义的电阻。
[0028]
注意并强调,图3的电气等效示意图是图2的拓扑结构的产物。因此,第一变阻器302说明了由迹线202沿着y轴部分204a、x轴部分206a和y轴部分204b的变形产生的可变阻抗。在x轴部分206a非常短(例如100微米或更短),而y轴部分204a和y轴部分204b各自都是多个毫米或多个厘米(multiple millimeters or centimeters)长的示例中,第一变阻器302可以表示对应于迹线202的那些部分的阻抗(以及通过关联表示沿y轴施加的应变)的变化。类似地,第二变阻器304可以对应于x轴部分206b和x轴部分206c,而第三变阻器306可以对应于y轴部分204b、y轴部分204c和y轴部分204d。此外,第一逻辑节点308可以对应于第一节点208,第二逻辑节点310和第三逻辑节点312可以对应于第二节点210,以及第四逻辑节点314可以对应于第三节点212。
[0029]
然而,应该认识到并理解,电气等效示意图的原理可以通过电气部件的任何合适布置来获得,并且不局限于任何特定的拓扑结构或任何特定的电气部件。因此,柔性差动应变传感器102的各种示例不一定用导电凝胶实现,在这方面来说,可以利用替代部件,该替代部件可以根据可变形基板104上和/或部件本身上的局部应变而改变阻抗。类似地,如图1所示的柔性差动应变传感器102可以在替代机制可行的范围内实现而不考虑可变阻抗。然而,与潜在的替代部件相比,具有导电凝胶的柔性差动应变传感器102的实现可以提供电气和机械简单性、鲁棒性、弹性(resilience)和成本等因素的优势。在柔性差动应变传感器102的使用中以及在柔性差动应变传感器102的制造过程中都可以看到这种优势。
[0030]
图4a和图4b在示例实施例中示出了可通过其形成图2的柔性差动应变传感器102的拓扑结构的过程的抽象表示。在图4a中,形成导电凝胶的网格,包括与y轴对准的部分402、与x轴对准的部分404、以及节点208、210、212和第四节点406。在图4b中,网格的某些部分402、404,例如通过切割或以其他方式从导电凝胶迹线202的剩余部分断开而被移除,如虚线所示。剩余部分(即实线)对应于图2拓扑结构中所示的迹线202及其各个部分204、206。因此,第四节点406也被移除并且是不可操作的。虽然以示例的方式提供了图4a的网格结构,但是应当认识到并理解,网格可以被放大或收缩,具有更多或更少的部分402、404以及
更多或更少的节点。
[0031]
与简单地直接产生图2的拓扑结构的过程相比,形成图4a中的初始网格可能具有某些优势。特别地,图4a的网格结构允许初始配置,该初始配置可以通过移除不需要的部分而容易地适应任何最终期望的拓扑结构。此外,初始网格可以被实现为未连接/稀疏连接的网格图案,其中虽然一些顶点最终与输出节点208、210、212、406相关联,但其他顶点408最终不与输出节点208、210、212、406相关联。
[0032]
虽然图4a的初始网格作为可通过其制造图2的拓扑结构的工艺的一部分被包括进来,并且这样做可以在制造工艺对各种用例的适应性方面提供某些优点,但是强调的是,可以不利用初始网格而直接到达图2的拓扑结构。在这种情况下,导电凝胶可以应用于拓扑结构中,而不必移除导电迹线的任何部分。虽然这样做可能不太适应不同的期望拓扑结构,但这样的工艺也可以相对更快地执行并导致导电凝胶和其他部件的更少的浪费。
[0033]
图5是示例实施例中的柔性差动应变传感器502的框图。柔性差动应变传感器502包括与柔性差动应变传感器102的部件相同的许多部件。因此,502可以包括第一感测元件106,该第一感测元件106具有被布置成感测沿y轴的应变的第一有源部分108。第一端子110提供来自第一感测元件106的电输出。第二感测元件112可以具有第二有源部分114和抵消部分116,其中第二端子118提供来自第二感测元件112的电输出。第二有源部分114可以定位在可变形基板104上以感测沿x轴的应变,并且抵消部分116可以定位在可变形基板104上以逻辑上或数学上抵消由第一感测元件106的第一有源部分108检测到的沿y轴的应变。因此,第一感测元件106可能对y轴上的应变敏感,但对x轴上的应变不很敏感或不敏感。相反,第二感测元件112可能对施加在x轴和y轴两者上的应变敏感。虽然没有示出信号处理单元120,但是应当认识到并理解,这种部件可以像在柔性差动应变传感器102中一样被包括作为柔性差动应变传感器502的一部分。
[0034]
然而,与柔性差动应变传感器102相反,柔性差动应变传感器502通常形成u形。结果,第一有源部分108与抵消部分116间隔开。因此,与柔性差动应变传感器102相比,柔性差动应变传感器502可以对跨可变形基板104的宽度的沿x轴的差分应变相对更加敏感,但是对第一感测元件106附近的差分应变相对不太敏感。应当认识到并理解,关于柔性差动应变传感器102和柔性差动应变传感器502之间的相对差异所讨论的原理可以应用于各种替代的柔性差动应变传感器中的任何一种,并且因此可以根据需要实现各种配置。
[0035]
图6是示例实施例中的三维柔性差动应变传感器602的拓扑结构。三维柔性差动应变传感器602在所有三个轴(x轴、y轴和z轴)上被定位在可变形基板104上和可变形基板104内。因此,在所示示例中,导电凝胶迹线604包括被定位在顶部主表面606、底部主表面608上的部分,以及被定位成在顶部主表面606和底部主表面608之间穿过可变形基板104的部分。如图所示,迹线604还包括顶点612处的节点610,尽管如本文所公开的,并非所有顶点612都是节点610,而是根据需要用作节点610。
[0036]
拓扑结构是为了说明的目的而提供的,并且应当认识到并理解,长度可能被夸大并且不一定是成比例的。因此,例如,当可变形基板104是例如在衬衫中使用的纺织品时,迹线604的沿着x轴和y轴的部分的长度可以是多个毫米或多个厘米,而迹线604的沿着z轴的长度可以是一毫米的几分之一,例如一百(100)微米或更少。根据使用三维柔性差动应变传感器602的环境,可以考虑各种长度的其他示例。
[0037]
此外,为了清楚起见,拓扑结构以简化的格式提供,但是应当认识到并理解,类似于关于图4a和图4b描述的网格图案的扩展的三维网格图案可用于增加迹线604和节点610的可用部分。与图4a和图4b中一样,扩展的网格图案可以允许对三维柔性差动应变传感器602的制造工艺具有相对更大的适应性和/或可以允许不同于图6中所示的立方体的三维拓扑结构。也可以在没有扩展的三维网格的中间步骤的情况下实现附加的三维拓扑结构。
[0038]
基于关于柔性差动应变传感器102呈现的术语,迹线604的沿着z轴延伸的部分可以被理解为形成第三感测元件614,该第三感测元件614包括至少一个有源部分和至少一个抵消部分,例如,第三有源部分和第二抵消部分。假设三维柔性差动应变传感器602的所示的拓扑结构包括沿着每个轴的迹线604的多个部分,将每个特定部分识别为有源部分或抵消部分可能是主观的,并且倾向于根据可变形基板104上正在进行应变评估的位置在任何时间发生变化。因此,信号处理单元120可以根据需要利用迹线604的任何特定部分作为有源部分或抵消部分。
[0039]
与二维柔性差动应变传感器102、502一样,节点610可以耦合到信号处理单元120,并且跨各对节点610的阻抗的变化被用作向量,以识别被施加在可变形基板104并通常施加在三维柔性差动应变传感器602上的三维应变。在这样的示例中,所得到的向量可以包括至少x1、y1和z1,并且基于哪些节点610被用来形成向量,可以包括沿着一些或所有轴的更多的测量值。此外,信号处理单元120可以利用迹线604的平行部分来抵消掉沿着平行轴的应变。因此,为了抵消掉沿y轴的应变,信号处理单元120可以例如从包括y轴部分616b的两个节点610之间的阻抗中减去包括y轴部分616a的两个节点610之间的阻抗,或者从包括y轴部分616a的两个节点610之间的阻抗中减去包括y轴部分616c的两个节点610之间的阻抗,等等。
[0040]
在一些实施例中,柔性差动应变传感器102、502、602可以使用用于感测元件的一个或更多个可变形导体(例如'727申请中公开的可变形基板和/或导体)来实现为柔性和/或可拉伸应变传感器。在一些实施例中,应变传感器102、502、602可以使用在公布于2020年2月27日的美国专利申请公开号2020/0066628中描述的任何材料和/或制造技术来制造,该美国专利申请通过引用以其整体并入本文。
[0041]
根据本公开的原理,应变传感器102、502、602可用于使用各种材料组合的各种应用中。例如,柔性和/或可拉伸应变传感器102、502、602可以应用于和/或集成到服装制品、鞋子、帽子、背包或其他包、工业纺织品、室内装潢(upholstery)、土工织物、非纺织薄膜或其中应变感测可能有用的任何其他制造物品。
[0042]
在一些示例实施例中,用柔性和/或可拉伸层(例如,各种热固性薄膜、片材等、和/或热塑性聚氨酯(tpu))制造的应变传感器102、502、602可以集成到诸如衬衫或背心的服装制品中,以感测穿戴该制品的人的呼吸。传感器可以被布置成使得传感器或计量器的水平(x轴)部分在胸腔上,并且如果穿戴者是站立的,则该水平(x轴)部分与地平线平行。传感器的竖直(y轴)部分可以与穿戴者的脊柱对齐,即,如果穿戴者是站立的,则该竖直(y轴)部分垂直于地平线。在这样的配置中,在各种情况下,如果竖直(y轴)部分可以对穿戴者背部的弯曲做出响应,来自应变传感器102、502、602的x轴部分和y轴部分的输出可以提供对穿戴者呼吸的响应。
[0043]
如本文所公开的,本公开的一些发明原理涉及应变传感器102、502、602,这些应变
传感器能够以可以区分不同维度中的刺激的方式对两个或更多个维度中(例如,沿着两个不同的轴)的刺激敏感。例如,传感器可以包括两个感测元件,每个感测元件可以具有被布置成感测沿不同轴的刺激的有源部分。感测元件中的一个或两个还可以具有抵消部分,该抵消部分可以被布置成抵消沿着另一个感测元件的轴的刺激的影响。例如,这样的布置可用于在与试图测量的方向不同的方向上抵消不想要的刺激伪影。
[0044]
这种多轴应变传感器102、502、602可用于区分诸如人体的复杂系统中的输入。例如,这种多轴传感器系统可用于区分粗大运动(gross motor movement)、呼吸和由肌肉屈伸引起的肌肉尺寸变化。此外,作为示例,应变传感器102、502、602系统可以包括固定到服装的,随着胸腔扩张而拉伸的感测元件,该感测元件可以利用胸腔扩张来测量呼吸。然而,其他运动,例如躯干的弯曲,也可能导致传感器拉伸,导致呼吸测量结果的潜在不准确性。然而,如果应变传感器102、502、602包括一个感测元件和一个第二感测元件,该一个感测元件被布置使得它的轴垂直于脊柱并围绕胸腔的一部分延伸,该第二感测元件被布置使得它的轴平行于脊柱延伸,则感测系统可以通过第二感测元件的变形来检测躯干的弯曲,并且可以使用由第二感测元件的变形生成的信息来区分躯干的弯曲和呼吸。由应变传感器102、502、602生成的数据可以确定第一传感器的拉伸的哪一部分不归因于呼吸,从而确保呼吸测量结果更准确。
[0045]
作为另一个示例,多轴应变传感器102、502、602可用于区分给定粗大运动中不同肌肉的募集(recruitment),或机械系统的不同方向性运动。根据本公开的应变传感器102、502、602的另一个示例应用是在用于加固护堤、堤坝或其他土方结构的土工织物中,其中多轴传感器可以区分正常沉降和异常坍塌或移位,异常坍塌或移位可以指示即将发生的垮塌。根据本公开的多轴应变传感器102、502、602的其他示例应用包括帆(例如用于帆船、帆板等的帆)、风筝、降落伞,等等。附加的示例包括用于诸如铰接接头、形状记忆合金致动器等机械的覆盖物/包层。又有更多的示例包括可充气结构,例如可充气支柱、轮胎、气球、橡皮艇等。另外的示例包括任何结构,例如底盘、框架、外壳等,这些结构可以以有利于感测和/或测量的方式翘曲、弯曲或以其他方式变形。
[0046]
本文描述的实施例和示例实现细节是为了说明的目的。附图不一定按比例示出。本发明原理不限于这些实施例或细节。本专利公开的多个发明原理可以具有单独的用途和益处。然而,当组合时,本公开中描述的发明原理,包括通过引用并入的部分,可以使单独的元件以新的方式相互作用,以提供协同结果。
[0047]
本文所述的物品中包含的导电组合物(例如导电凝胶)可以例如具有糊状或胶稠度(gel consistency),该糊状或胶稠度可以通过利用当氧化镓被混合到共晶镓合金中时该氧化镓可以赋予组合物的结构等来产生。当混合到共晶镓合金中时,氧化镓可以形成本文进一步描述的微结构或纳米结构,这些结构能够改变共晶镓合金的散装材料(bulk material)性质。
[0048]
如本文所用,术语“共晶”通常指组合物的两个或更多个相的具有最低熔点的混合物,并且其中这些相在该温度处同时从熔融溶液中结晶。获得共晶的相的比率由相图上的共晶点确定。共晶合金的特征之一是它们具有明显的熔点。
[0049]
导电组合物可以被表征为导电剪切稀释(thinning)凝胶组合物。本文所述的导电组合物也可以被表征为具有宾汉塑料(bingham plastic)性质的组合物。例如,导电组合物
可以是粘塑性的,使得它们在低应力下是刚性的并且能够形成和保持以高度和宽度为特征的三维特征,但是在高应力下作为粘性流体流动。因此,例如,导电组合物在低剪切下具有约10,000,000cp至约40,000,000cp的粘度,以及在高剪切下具有约150至180的粘度。例如,在低剪切条件下,组合物在低剪切条件下具有约10,000,000cp、约15,000,000cp、约20,000,000cp、约25,000,000cp、约30,000,000cp、约45,000,000cp或约40,000,000cp的粘度。在高剪切条件下,组合物具有约150cp、约155cp、约160cp、165cp、约170cp、约175cp或约180cp的粘度。
[0050]
本文所述的导电组合物可以具有任何合适的电导率,例如从约2x105s/m至约8x10
5 s/m的电导率。
[0051]
本文所述的导电组合物可以具有任何合适的熔点,例如从约-20℃至约10℃、从约-10℃至约5℃、从约-5℃至约5℃或者从约-5℃至约0℃的熔点。
[0052]
导电组合物可以包含共晶镓合金和氧化镓的混合物,其中共晶镓合金和氧化镓的混合物中的共晶镓合金具有在约59.9%和约99.9%之间(例如在约67%和约90%之间)的重量百分比(wt%),并且该混合物中的氧化镓具有在约0.1%和约2.0%之间(例如在约0.2和约1%之间)的wt%。例如,导电组合物可以具有约60%、约61%、约62%、约63%、约64%、约65%、约66%、约67%、约68%、约69%、约70%、约71%、约72%、约73%、约74%、约75%、约76%、约77%、约78%、约79%、约80%、约81%、约82%、约83%、约84%、约85%、约86%、约87%、约88%、约89%、约90%、约91%、约92%、约93%、约94%、约95%、约96%、约97%、约98%、约99%或更大,例如约99.9%的共晶镓合金,以及约0.1%、约0.2%、约0.3%、约0.4%、约0.5%、约0.6%、约0.7%、约0.8%、约0.9%、约1.0%、约1.1%、约1.2%、约1.3%、约1.4%、约1.5%、约1.6%、约1.7%、约1.8%、约1.9%和约2.0%的氧化镓。
[0053]
共晶镓合金可以以任何元素比例包括镓-铟或镓-铟-锡。例如,共晶镓合金包括镓和铟。导电组合物在镓铟合金中可以具有任何合适重量百分比的镓,该重量百分比在约40%和约95%之间,例如约40%、约41%、约42%、约43%、约44%、约45%、约46%、约47%、约48%、约49%、约50%、约51%、约52%、约53%、约54%、约55%、约56%、约57%、约58%、约59%、约60%、约61%、约62%、约63%、约64%、约65%、约66%、约67%、约68%、约69%、约70%、约71%、约72%、约73%、约74%、约75%、约76%、约77%、约78%、约79%、约80%、约81%、约82%、约83%、约84%、约85%、约86%、约87%、约88%、约89%、约90%、约91%、约92%、约93%、约94%或约95%。
[0054]
导电组合物在镓铟合金中可以具有一定重量百分比的铟,该重量百分比在约5%和约60%之间,例如约5%、约6%、约7%、约8%、约9%、约10%、约11%、约12%、约13%、约14%、约15%、约16%、约17%、约18%、约19%、约20%、约21%、约22%、约23%、约24%、约25%、约26%、约27%、约28%、约29%、约30%、约31%、约32%、约33%、约34%、约35%、约36%、约37%、约38%、约39%、约40%、约41%、约42%、约43%、约44%、约45%、约46%、约47%、约48%、约49%、约50%、约51%、约52%、约53%、约54%、约55%、约56%、约57%、约58%、约59%或约60%。
[0055]
共晶镓合金可以包括镓和锡。例如,导电组合物在合金中可以具有一定重量百分比的锡,该重量百分比在约0.001%和约50%之间,例如约0.001%、约0.005%、约0.01%、约0.05%、约0.1%、约0.2%、约0.3%、约0.4%、约0.5%、约0.6%、约0.7%、约0.8%、约
0.9%、约1%、约1.5%、约2%、约3%、约4%、约5%、约5%、约6%、约7%、约8%、约9%、约10%、约11%、约12%、约13%、约14%、约15%、约16%、约17%、约18%、约19%、约20%、约21%、约22%、约23%、约24%、约25%、约26%、约27%、约28%、约29%、约30%、约31%、约32%、约33%、约34%、约35%、约36%、约37%、约38%、约39%、约40%、约41%、约42%、约43%、约44%、约45%、约46%、约47%、约48%、约49%或约50%。
[0056]
导电组合物可以包含与共晶镓合金和氧化镓混合的一种或更多种微颗粒或亚微米级颗粒。颗粒可以悬浮在共晶镓合金内,要么被涂覆在共晶镓合金或镓中,并被包封在氧化镓中,要么未以先前方式涂覆。微米级或亚微米级颗粒的大小范围可以从纳米到微米,并且可以悬浮在镓、镓铟合金或镓铟锡合金中。颗粒与合金的比率可以变化,并且可以改变导电组合物的流动性质。微结构和纳米结构可以通过超声处理或其他合适的手段在导电组合物内混合。导电组合物可以包括共晶镓合金/氧化镓混合物中的微结构和纳米结构的胶态悬浮体(colloidal suspension)。
[0057]
导电组合物还可以包括分散在组合物内的一种或更多种微颗粒或亚微米级颗粒。这可以以任何合适的方式实现,包括通过将颗粒悬浮在导电组合物内,或者具体地悬浮在共晶镓合金流体内,这些颗粒要么涂覆在共晶镓合金或镓中并包封在氧化镓中,要么未以先前方式涂覆。这些颗粒的大小范围可以从纳米到微米,并且可以悬浮在镓、镓铟合金或镓铟锡合金中。颗粒与合金的比率可以变化,以便改变合金和导电组合物中的至少一种的流体性质,等等。此外,向胶态悬浮体或共晶镓合金中添加任何辅助材料,以便增强或修改其物理性质、电性质或热性质。微结构和纳米结构在共晶镓合金和导电组合物中的至少一种内的分布可以通过任何合适的手段来实现,包括超声处理或其他机械手段,而不添加颗粒。在某些实施例中,将一种或更多种微颗粒或亚微米颗粒与共晶镓合金和导电组合物中的至少一种混合,其中微颗粒的wt%在约0.001%和约40.0%之间,例如约0.001%、约0.005%、约0.01%、约0.05%、约0.1%、约0.2%、约0.3%、约0.4%、约0.5%、约0.6%、约0.7%、约0.8%、约0.9%、约1%、约1.5%、约2%、约3%、约4%、约5%、约6%、约7%、约8%、约9%、约10%、约11%、约12%、约13%、约14%、约15%、约16%、约17%、约18%、约19%、约20%、约21%、约22%、约23%、约24%、约25%、约26%、约27%、约28%、约29%、约30%、约31%、约32%、约33%、约34%、约35%、约36%、约37%、约38%、约39%或约40。
[0058]
该一种或更多种微米或亚微米颗粒可由任何合适的材料制成,包括苏打玻璃(soda glass)、二氧化硅、硼硅酸盐玻璃、石英、氧化铜、镀银铜、非氧化铜、钨、超饱和锡颗粒、玻璃、石墨、镀银铜(例如镀银铜球和镀银铜薄片)、铜薄片或铜球或它们的组合,或者可被共晶镓合金和导电组合物中的至少一种润湿的任何其他材料。该一种或更多种微颗粒或亚微米级颗粒可以具有任何合适的形状,包括球状、棒状、管状、薄片状、板状、立方体形状、棱柱形状、金字塔形状、笼状(cage)和树枝状大分子(dendrimers)形状。该一种或更多种微颗粒或亚微米级颗粒可以具有任何合适的大小,包括从约0.5微米至约60微米的大小范围,例如约0.5微米、约0.6微米、约0.7微米、约0.8微米、约0.9微米、约1微米、约1.5微米、约2微米、约3微米、约4微米、约5微米、约6微米、约7微米、约8微米、约9微米、约10微米、约11微米、约12微米、约13微米、约14微米、约15微米、约16微米、约17微米、约18微米、约19微米、约20微米、约21微米、约22微米、约23微米、约24微米、约25微米、约26微米、约27微米、约28微米、约29微米、约30微米、约31微米、约32微米、约33微米、约34微米、约35微米、约36微米、约37
微米、约38微米、约39微米、约40微米、约41微米、约42微米、约43微米、约44微米、约45微米、约46微米、约47微米、约48微米、约49微米、约50微米、约51微米、约52微米、约53微米、约54微米、约55微米、约56微米、约57微米、约58微米、约59微米或约60微米。
[0059]
本文所述的导电组合物可以通过任何合适的方法制备,包括通过表面氧化物/合金界面的剪切混合将形成在共晶镓合金表面上的表面氧化物混合到共晶镓合金的本体中的方法。这种组合物的剪切混合可以在表面氧化物中诱导交联的微结构;从而形成导电剪切稀释凝胶组合物。微结构的胶态悬浮体可以在共晶镓合金/氧化镓混合物(例如氧化镓颗粒和/或片)内形成。
[0060]
表面氧化物可以以任何合适的比率混合,例如以约59.9%(按重量)和约99.9%之间的共晶镓合金与约0.1%(按重量)和约2.0%之间的氧化镓的比率混合。例如与氧化镓混合的镓合金的重量百分比为约60%、61%、约62%、约63%、约64%、约65%、约66%、约67%、约68%、约69%、约70%、约71%、约72%、约73%、约74%、约75%、约76%、约77%、约78%、约79%、约80%、约81%、约82%、约83%、约84%、约85%、约86%、约87%、约88%、约89%、约90%、约91%、约92%、约93%、约94%、约95%、约96%、约97%、约98%、约99%或更大,例如约99.9%的共晶镓合金,而氧化镓的重量百分比为约0.1%、约0.2%、约0.3%、约0.4%、约0.5%、约0.6%、约0.7%、约0.8%、约0.9%、约1.0%、约1.1%、约1.2%、约1.3%、约1.4%、约1.5%、约1.6%、约1.7%、约1.8%、约1.9%和约2.0%的氧化镓。在实施例中,共晶镓合金可以以所提到元素的任何比例包括镓-铟或镓-铟-锡。例如,共晶镓合金可以包括镓和铟。
[0061]
镓铟合金中镓的重量百分比可以在约40%和约95%之间,例如约40%、约41%、约42%、约43%、约44%、约45%、约46%、约47%、约48%、约49%、约50%、约51%、约52%、约53%、约54%、约55%、约56%、约57%、约58%、约59%、约60%、约61%、约62%、约63%、约64%、约65%、约66%、约67%、约68%、约69%、约70%、约71%、约72%、约73%、约74%、约75%、约76%、约77%、约78%、约79%、约80%、约81%、约82%、约83%、约84%、约85%、约86%、约87%、约88%、约89%、约90%、约91%、约92%、约93%、约94%或约95%。
[0062]
可替代地或附加地,镓铟合金中铟的重量百分比可以在约5%和约60%之间,例如约5%、约6%、约7%、约8%、约9%、约10%、约11%、约12%、约13%、约14%、约15%、约16%、约17%、约18%、约19%、约20%、约21%、约22%、约23%、约24%、约25%、约26%、约27%、约28%、约29%、约30%、约31%、约32%、约33%、约34%、约35%、约36%、约37%、约38%、约39%、约40%、约41%、约42%、约43%、约44%、约45%、约46%、约47%、约48%、约49%、约50%、约51%、约52%、约53%、约54%、约55%、约56%、约57%、约58%、约59%或约60%。
[0063]
共晶镓合金可以包括镓、铟和锡。镓铟锡合金中锡的重量百分比可以在约0.001%和约50%之间,例如约0.001%、约0.005%、约0.01%、约0.05%、约0.1%、约0.2%、约0.3%,约0.4%、约0.5%、约0.6%、约0.7%、约0.8%、约0.9%、约1%、约1.5%、约2%、约3%、约4%、约5%、约6%、约7%、约8%、约9%、约10%、约11%、约12%、约13%、约14%、约15%、约16%、约17%、约18%、约19%、约20%、约21%、约22%、约23%、约24%、约25%、约26%、约27%、约28%、约29%、约30%、约31%、约32%、约33%、约34%、约35%、约36%、约37%、约38%、约39%、约40%、约41%、约42%、约43%、约44%、约45%、约46%、约47%、约
48%、约49%或约50%。
[0064]
镓铟锡合金中镓的重量百分比可以在约40%和约95%之间,例如约40%、约41%、约42%、约43%、约44%、约45%、约46%、约47%、约48%、约49%、约50%、约51%、约52%、约53%、约54%、约55%、约56%、约57%、约58%、约59%、约60%、约61%、约62%、约63%、约64%、约65%、约66%、约67%、约68%、约69%、约70%、约71%、约72%、约73%、约74%、约75%、约76%、约77%、约78%、约79%、约80%、约81%、约82%、约83%、约84%、约85%、约86%、约87%、约88%、约89%、约90%、约91%、约92%、约93%、约94%或约95%。
[0065]
可替代地或附加地,镓铟锡合金中铟的重量百分比可以在约5%和约60%之间,例如约5%、约6%、约7%、约8%、约9%、约10%、约11%、约12%、约13%、约14%、约15%、约16%、约17%、约18%、约19%、约20%、约21%、约22%、约23%、约24%、约25%、约26%、约27%、约28%、约29%、约30%、约31%、约32%、约33%、约34%、约35%、约36%、约37%、约38%、约39%、约40%、约41%、约42%、约43%、约44%、约45%、约46%、约47%、约48%、约49%、约50%、约51%、约52%、约53%、约54%、约55%、约56%、约57%、约58%、约59%或约60%。
[0066]
一种或更多种微颗粒或亚微米级颗粒可以与共晶镓合金和氧化镓混合。例如,一种或更多种微颗粒或亚微米颗粒可以与混合物混合,其中组合物中微颗粒的wt%在约0.001%和约40.0%之间,例如约0.001%、约0.005%、约0.01%、约0.05%、约0.1%、约0.2%、约0.3%、约0.4%、约0.5%、约0.6%、约0.7%、约0.8%、约0.9%、约1%、约1.5%、约2%、约3%、约4%、约5%、约6%、约7%、约8%、约9%、约10%、约11%、约12%、约13%、约14%、约15%、约16%、约17%、约18%、约19%、约20%、约21%、约22%、约23%、约24%、约25%、约26%、约27%、约28%、约29%、约30%、约31%、约32%、约33%、约34%、约35%、约36%、约37%,约38%,约39%或约40。在实施例中,颗粒可以是苏打玻璃、二氧化硅、硼硅酸盐玻璃、石英、氧化铜、镀银铜、非氧化铜、钨、超饱和锡颗粒、玻璃、石墨、镀银铜(例如镀银铜球和镀银铜薄片)、铜薄片或铜球或它们的组合,或者可以被镓润湿的任何其他材料。在一些实施例中,一种或更多种微颗粒或亚微米级微粒呈球状、棒状、管状、薄片状、板状、立方体形状、棱柱形状、金字塔形状、笼状和树枝状大分子形状。在某些实施例中,一种或更多种微颗粒或亚微米级颗粒的大小范围为约0.5微米至约60微米,例如,约0.5微米、约0.6微米、约0.7微米、约0.8微米、约0.9微米、约1微米、约1.5微米、约2微米、约3微米、约4微米、约5微米、约6微米、约7微米、约8微米、约9微米、约10微米、约11微米、约12微米、约13微米、约14微米、约15微米、约16微米、约17微米、约18微米、约19微米、约20微米、约21微米、约22微米、约23微米、约24微米、约25微米、约26微米、约27微米,约28微米、约29微米、约30微米、约31微米、约32微米、约33微米、约34微米、约35微米、约36微米、约37微米、约38微米、约39微米、约40微米、约41微米、约42微米、约43微米、约44微米、约45微米、约46微米、约47微米、约48微米、约49微米、约50微米、约51微米、约52微米、约53微米、约54微米、约55微米、约56微米、约57微米、约58微米、约59微米或约60微米。
[0067]
示例
[0068]
示例1是一种柔性差动应变传感器,该柔性差动应变传感器包括:可变形基板,该可变形基板具有第一轴和不同于第一轴的第二轴;包括导电凝胶的第一感测元件,该第一感测元件被布置成感测可变形基板中沿第一轴的应变;包括导电凝胶的第二感测元件,该
第二感测元件具有第一部分和第二部分,该第一部分被布置成感测可变形基板中沿第一轴的应变,该第二部分被布置成感测可变形基板中沿第二轴的应变;其中,第二感测元件被布置成抵消由第一感测元件感测到的沿第一轴的刺激的至少一部分。
[0069]
在示例2中,示例1的主题包括,其中第一感测元件和第二感测元件的导电凝胶的电阻抗响应于可变形基板上的应变的变化而变化,并且其中第一感测元件和第二感测元件被配置成至少部分地基于阻抗的变化来感测应变。
[0070]
在示例3中,示例2的主题包括信号处理单元,该信号处理单元可操作地耦合到第一感测元件和第二感测元件,该信号处理单元被配置为通过从来自第一感测元件的阻抗变化中减去来自第二感测元件的阻抗变化来确定沿第一轴的应变。
[0071]
在示例4中,示例3的主题包括,其中信号处理单元还被配置成基于来自第一感测元件的阻抗变化来确定沿第二轴的应变。
[0072]
在示例5中,示例4的主题包括,其中信号处理单元还被配置成输出指示沿第一轴和沿第二轴的应变的向量。
[0073]
在示例6中,示例5的主题包括,其中向量指示可变形基板上的应变相对于初始应变的百分比变化(percent change)。
[0074]
在示例7中,示例6的主题包括,其中应变的百分比变化对应于可变形基板的变形的百分比变化。
[0075]
在示例8中,示例2-示例7的主题包括,其中第一轴与第二轴正交,并且可变形基板还具有与第一轴和第二轴正交的第三轴,并且该主题还包括:包括导电凝胶的第三感测元件,该第三感测元件被布置成感测可变形基板中至少沿第三轴的应变。
[0076]
在示例9中,示例1-示例8的主题包括,其中第一感测部分包括第一有源部分,其中第二感测部分包括第二有源部分和抵消部分,并且其中第一有源部分、第二有源部分和抵消部分中的每一个包括至少部分地基于施加在相应的第一有源部分、第二有源部分和抵消部分上的应变的可变阻抗。
[0077]
在示例10中,示例1-示例9的主题包括,其中可变形基板被配置成附接到结构以确定结构上的应变。
[0078]
示例11是一种制造柔性差动应变传感器的方法,该方法包括:获得可变形基板,该可变形基板具有第一轴和不同于第一轴的第二轴;在可变形基板上布置包括导电凝胶的第一感测元件,以感测可变形基板中沿第一轴的应变;在可变形基板上布置包括导电凝胶的第二感测元件,该第二感测元件具有第一部分和第二部分,该第一部分感测可变形基板中沿第一轴的应变,该第二部分感测可变形基板中沿第二轴的应变;其中第二感测元件被布置成抵消由第一感测元件感测到的沿第一轴的刺激的至少一部分。
[0079]
在示例12中,示例11的主题包括,其中第一感测元件和第二感测元件的导电凝胶的电阻抗响应于可变形基板上的应变的变化而变化,并且其中第一感测元件和第二感测元件被配置成至少部分地基于阻抗的变化来感测应变。
[0080]
在示例13中,示例12的主题包括,将信号处理单元可操作地耦合到第一感测元件和第二感测元件,该信号处理单元被配置成通过从来自第一感测元件的阻抗变化中减去来自第二感测元件的阻抗变化来确定沿第一轴的应变。
[0081]
在示例14中,示例13的主题包括,其中信号处理单元还被配置成基于来自第一感
测元件的阻抗变化来确定沿第二轴的应变。
[0082]
在示例15中,示例14的主题包括,其中信号处理单元还被配置成输出指示沿第一轴和沿第二轴的应变的向量。
[0083]
在示例16中,示例15的主题包括,其中向量指示可变形基板上的应变相对于初始应变的百分比变化。
[0084]
在示例17中,示例16的主题包括,其中应变的百分比变化对应于可变形基板的变形的百分比变化。
[0085]
在示例18中,示例12-示例17的主题包括,其中第一轴与第二轴正交,并且可变形基板还具有与第一轴和第二轴正交的第三轴,并且该方法还包括:在可变形基板上布置包括导电凝胶的第三感测元件,以感测可变形基板中至少沿第三轴的应变。
[0086]
在示例19中,示例11-示例18的主题包括,其中第一感测部分包括第一有源部分,其中第二感测部分包括第二有源部分和抵消部分,并且其中第一有源部分、第二有源部分和抵消部分中的每一个包括至少部分地基于施加在相应的第一有源部分、第二有源部分和抵消部分上的应变的可变阻抗。
[0087]
在示例20中,示例11-示例19的主题包括,其中可变形基板被配置成附接到结构以确定结构上的应变。
[0088]
示例21是包括指令的至少一种机器可读介质,当由处理电路执行时,该指令使得处理电路执行操作以实现示例1-示例20中的任一项。
[0089]
示例22是包括用于实现示例1-示例20中任一项的装置的设备。
[0090]
示例23是用于实现示例1-示例20中任一项的系统。
[0091]
示例24是使用示例1-示例20中任一项的方法。
[0092]
本说明书的一些部分是根据对在机器存储器(例如,计算机存储器)内存储为位或二进制数字信号的数据的操作的算法或符号表示来呈现的。这些算法或符号表示是数据处理领域的普通技术人员用来将他们工作的实质传达给本领域的其他技术人员的技术示例。如本文所用,“算法”是导致期望结果的自洽操作序列或类似处理。在这种情况下,算法和操作涉及物理量的物理操作。典型地,但不是必须地,这些量可以采取能够被机器存储、访问、传输、组合、比较或以其他方式操纵的电、磁或光信号的形式。主要出于常用的原因,有时使用诸如“数据”、“内容”、“位”、“值”、“元件”、“符号”、“字符”、“术语”、“数”、“数字”等词来指代这种信号是方便的。然而,这些词仅仅是方便的标签,并且与适当的物理量相关联。
[0093]
除非另外特别说明,否则本文中使用诸如“处理”、“计算”、“测算”、“确定”、“呈现”、“显示”等词的讨论可以指机器(例如,计算机)的动作或过程,该机器操纵或转换被表示为在一个或更多个存储器(例如,易失性存储器、非易失性存储器或其任何合适的组合)、寄存器或接收、存储、传输或显示信息的其他机器组件内的物理(例如,电子、磁或光学)量的数据。此外,除非另外特别说明,否则如专利文献中常见的,术语“一个(a)”或“一个(an)”在本文中被使用来包括一个或一个以上的实例。最后,如本文所用,除非另外特别说明,否则连词“或”指的是非排他性的“或”。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1