用于辅助在道路区段中的泊车过程的方法、驾驶员辅助设备和机动车与流程
用于辅助在道路区段中的泊车过程的方法、驾驶员辅助设备和机动车
1.本发明涉及用于辅助在道路区段中的泊车过程的方法和驾驶员辅助设备,本发明还涉及包括该用于辅助在道路区段中的泊车过程的驾驶员辅助设备的机动车。
2.为了辅助驾驶员进行泊车过程,普遍的是在车辆中提供驾驶员辅助设备。这些驾驶员辅助设备可以通过指示、显示与相邻物体的距离或者干预车辆操纵在进行泊车过程中辅助驾驶员。为了能够在驾驶员的最小参与下启动泊车过程,在一些驾驶员辅助设备中规定,基于预先确定的指标推测存在驾驶员的泊车意愿。一个可能的指标例如可以是在停着的车辆中挂上倒挡。驾驶员只还需要在另外的步骤中确认泊车意愿。
3.为了能够在车辆行驶的情况下识别泊车意愿,通常使用车辆的行驶速度作为指标。这是因为,打算启动泊车过程的驾驶员根据经验降低速度,以便例如能够搜寻停车道上的现有停车可能性或者以便在启动泊车过程之前缩短必需的制动过程。在这些方法中将车辆的当前行驶速度与预设的阈值进行比较。如果低于该阈值,则驾驶员辅助设备推测驾驶员想要停车并且提供用于进行泊车过程的辅助。
4.选择预设的速度阈值作为存在泊车意愿的指标的缺点是,行驶速度的降低并不必然是由于驾驶员的泊车意愿。降低的行驶速度可能例如是由于交通流量增加、道路和/或天气状况不佳或者交通引导不清楚。将当前的行驶速度与取决于针对某一道路区段规定的最高速度的阈值进行比较往往不是令人满意的解决方案,因为该道路区段例如可能具有恶劣状况,该恶劣状况导致,尽管允许速度较高但车辆的平均速度大大低于允许的速度。在这种情况下,为一条道路设定全局阈值而不根据该道路的各个道路区段单独调整该值可能导致,当车辆在该道路区段上行驶时错误地识别出泊车意愿。频繁的错误识别会导致驾驶员对该功能的接受度降低。继而驾驶员可能停用相应的自动功能。因此,对于驾驶员辅助系统需要可靠地识别驾驶员的泊车意愿。
5.在专利文献de 10 2009 046 674 a1中公开了一种用于通过停放设备辅助将机动车停放到停车位置中的停放过程的方法。在该方法中规定,由停放设备识别机动车驾驶员的停放在停车位置上的意图。车辆驾驶员的驾驶员动作例如可以涉及转向运动、制动过程、设置行驶方向指示器、挂入倒挡和/或操作显示器件。
6.在专利文献us 2017/0355307 a1中公开了一种泊车辅助设备,其设置用于,检测可用的停车位并且在屏幕上显示关于可用停车位的信息。泊车辅助设备包括用于监测驾驶员的监测单元,该监测单元设置用于,检测驾驶员的表明停放车辆意图的身体运动。在此规定,当检测到驾驶员的表明停车意愿的身体运动并且车辆最高以预定速度行驶至少一个预定时间时,由泊车辅助设备在屏幕上建议实施泊车辅助模式。
7.本发明所要解决的技术问题是提供一种方法,该方法能够可靠地识别机动车的驾驶员的泊车意愿。
8.通过本发明提供一种用于辅助在道路区段中的泊车过程的方法。在该方法中规定,由车辆外部的中央计算机接收所述道路区段中的参考车辆的各自的速度。换而言之,在此规定,车辆外部的中央计算机接收车辆在该道路区段上行驶时的速度。这些车辆因此被
用作参考车辆,因为它们的速度被用作进一步的方法的参考。这些速度可以例如由相应的参考车辆发送至车辆外部的中央计算机,或者由基础设施装置检测并且发送至车辆外部的中央计算机。由所述车辆外部的中央计算机从所述各自的速度创建用于所述道路区段的统计量。换而言之,在该道路区段中行驶的速度由车辆外部的中央计算机分析,并且基于这些速度确定统计量。该统计量可以例如是速度的分布或平均值。
9.由机动车的驾驶员辅助设备检测机动车在所述路段上行驶期间的速度。换而言之,由驾驶员辅助设备确定机动车的当前速度,该机动车以该速度沿着该路段行驶。根据预先确定的比较方法,将检测到的速度与用于道路区段的统计量进行比较。换而言之,将机动车在该道路区段上行驶的速度与参考车辆在该道路区段上以前行驶的和/或当前行驶的、由统计量描述的速度进行比较。该比较根据预先确定的比较方法进行。
10.当车辆的检测到的在道路区段上行驶时的速度满足关于统计量的预先确定的标准时,由驾驶员辅助设备通过输出装置向机动车的驾驶员输出用于辅助泊车过程的询问信号。换而言之,当预先确定的标准被机动车的检测到的速度满足时,由驾驶员辅助设备的输出装置向驾驶员输出询问信号。该输出装置可以例如包括屏幕、扬声器或触觉元件。询问信号可以例如是能够向驾驶员发出的光学信号、声学信号或触觉信号。通过询问信号可以请求驾驶员确认或拒绝启动对泊车过程的辅助。关于统计量的预先确定的标准可以例如包括统计分布的特定的值范围、与平均值或阈值有关的关系。通过本发明产生的优点是,通过考虑在该道路区段中通常行驶的速度可以识别潜在的泊车意愿。
11.本发明还包括可选的扩展设计,通过这些扩展设计产生另外的优点。
12.本发明的一种扩展设计规定,所述统计量是速度的平均值。换而言之,在此规定,在预先确定的比较方法中将机动车的检测到的在道路区段上行驶时的速度与参考车辆已经在该道路区段上行驶的平均速度进行比较。通过该扩展设计产生的优点是,用平均值为比较方法提供简单的统计量。
13.本发明的一种扩展设计规定,所述统计量是速度的分布。换而言之,在此规定,参考车辆沿该路段的速度由作为统计量的分布或分布函数来描述。通过使用速度分布产生的优点是,能够实现差异化程度更高的比较方法,以便识别泊车意愿。例如可以规定,在速度分布中出现特征模式,这些特征模式能够实现选择速度的一个或多个值范围作为用于泊车意愿的标准。
14.本发明的扩展设计规定,所述统计量与季节有关和/或与星期几(即,一周中的某天)有关和/或与一天中的时间有关。换而言之,该统计量与已检测到参考车辆速度的一天中的时间、星期几和/或季节有关。通过该扩展设计产生的优点是,在统计量中可以考虑到,在道路区段中行驶的速度可能随一天中的时间、星期几和/或季节而改变。由此可以例如考虑到,例如在通勤交通时间期间,由于交通负荷大,在该道路区段上行驶的平均速度低于一天中的其它时间。通过与星期几的相关性,尤其可以考虑到工作日和节假日之间的速度差异。通过与季节的相关性,例如可以考虑到,在秋季或冬季,由于车道条件更差,在该道路区段上行驶的速度比夏季低。通过该扩展设计产生的优点是,统计量可以在时间上分级。
15.本发明的一种扩展设计规定,所述统计量与车辆类型有关。换而言之,在此规定,统计量具有与车辆类型的相关性。车辆类型可以例如包括轿车、货车、紧急任务用车或摩托车。因此,可以将在路段上行驶的速度分配给相应的车辆类型。换而言之,通过所述统计量
说明,哪个车辆类型以哪个速度曾在该路段上行驶。由此产生的优点是,可以考虑到各个单独的车辆类型之间的速度差异。例如由于法律规定可能对于不同的车辆类型在道路区段中规定不同的行驶速度,因此在该道路区段中可能出现不同的平均速度。不同行驶速度的另一个原因可能是由于道路区段中的上坡或下坡,这导致例如货车在道路区段中以低于轿车的速度行驶。在这种情况下,在识别轿车驾驶员的泊车意愿时考虑货车在该道路区段中的速度可能减小该识别的可靠性。
16.本发明的一种扩展设计规定,所述预先确定的标准与机动车相对于地理目的地的距离有关。换而言之可以规定,机动车的驾驶员被导航系统引导,以便到达预设的地理目的地。由于假定驾驶员打算将机动车停放在地理目的地附近,因此可以如此调整预先确定的标准,使得用于识别泊车意愿的阈值例如在地理目的地内的具有预先确定的半径的附近被降低,以便降低启动停放过程的障碍。由此产生的优点是,可以考虑到应该将机动车停放在目的地附近。
17.本发明的一种扩展设计规定,关于统计量的预先确定的标准被机动车的检测到的在道路区段上行驶时的速度满足的情况由中央计算机识别,并且通过通知信号引导驾驶员辅助设备输出询问信号。
18.本发明的一种扩展设计规定,当在输出询问信号之后由驾驶员辅助设备的输入装置检测到预先确定的用户输入时,由驾驶员辅助设备启动部分或完全自主的泊车过程。换而言之,在此规定,当驾驶员进行预先确定的用户输入作为对所输出的询问信号的响应时,由驾驶员辅助设备部分或完全自主地将机动车泊车。用户输入可以例如包括对按键、操纵杆、触摸屏的操纵或语音的用户输入。输入装置可以例如包括屏幕、按键、操纵杆或麦克风。由此产生的优点是,在识别出泊车意愿的情况下可以为驾驶员提供启动部分或完全自主的泊车过程的可能性。
19.本发明还包括一种用于机动车的驾驶员辅助设备。该驾驶员辅助设备可以尤其包括微型计算机和/或微控制器。驾驶员辅助设备设置用于,检测机动车在路段上行驶期间的速度。驾驶员辅助设备设置用于,根据预先确定的比较方法,将检测到的速度与用于道路区段的统计量进行比较。驾驶员辅助设备设置用于,当机动车的检测到的在道路区段上行驶时的速度满足关于统计量的预先确定的标准时,通过输出装置向车辆的驾驶员输出用于辅助泊车过程的询问信号。
20.本发明还包括一种具有驾驶员辅助设备的机动车。该机动车可以例如是轿车或者货车。驾驶员辅助设备设置用于,检测机动车在路段上行驶期间的速度。驾驶员辅助设备设置用于,根据预先确定的比较方法,将检测到的速度与用于道路区段的统计量进行比较。驾驶员辅助设备设置用于,当机动车的检测到的在道路区段上行驶时的速度满足关于统计量的预先确定的标准时,通过输出装置向车辆的驾驶员输出用于辅助泊车过程的询问信号。
21.本发明也包括根据本发明的驾驶员辅助设备和根据本发明的机动车的扩展设计,这些扩展设计具有如已经关于根据本发明的方法的扩展设计描述的特征。因此,在此不再描述根据本发明的驾驶员辅助设备和根据本发明的机动车的相应扩展设计。
22.本发明也包括所描述的实施方式的特征的组合。
23.以下描述本发明的实施例。为此,唯一的附图示出用于辅助在道路区段中的泊车过程的方法的可能流程。
24.以下阐述的实施例是本发明的优选实施例。在该实施例中,描述的部件分别是本发明的各个单独的、能彼此独立地看待的特征,这些特征也分别彼此独立地形成本发明的扩展设计并且因此也能够单独或者以与所示组合不同的组合被视为本发明的组成部分。此外,所描述的实施例也可以通过本发明的已描述的其它特征补充。
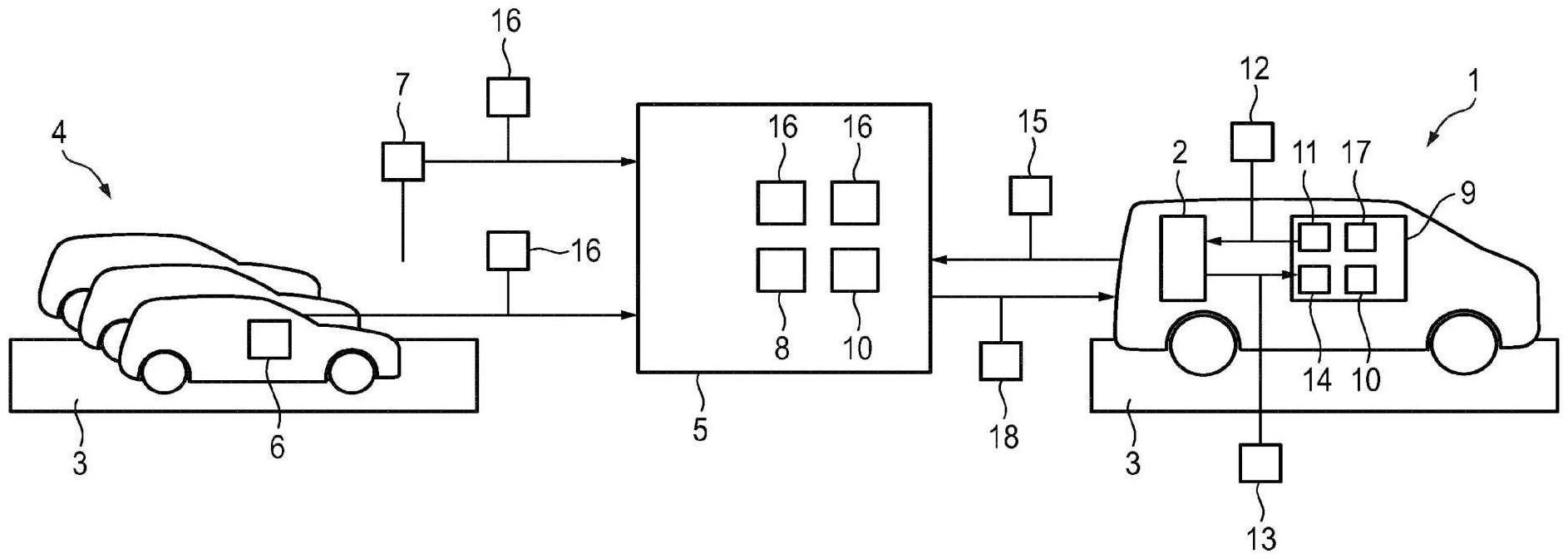
25.在附图中,功能相同的元件分别配设有相同的附图标记。唯一的附图示出用于辅助在道路区段3中的泊车过程的方法的可能流程。机动车1可以例如是货车或轿车。机动车1可以例如手动、部分自主或完全自主地驾驶。该方法可以设置用于辅助机动车1的驾驶员2进行泊车过程。为此可能需要识别驾驶员2停放机动车1的泊车意愿。驾驶员2可以沿着道路区段3驾驶机动车1。用于识别泊车意愿的指标是机动车1沿道路区段3行驶的速度15。打算停放机动车1的驾驶员2通常倾向于比道路区段3上的其它交通参与者开得更慢,以便驾驶员沿着道路区段3找到可能的空着的停车位。根据机动车1的当前速度15识别泊车意愿的困难在于,在道路区段3上行驶时的速度15受多个因素影响。慢速行驶不一定是因为泊车意愿。速度15可能例如是由于道路引导不明了、不利的天气条件或交通流量大。因此,法律上允许的对于道路区段3的速度15不是合适的参考量。为了确定用于速度15的合适的参考量,在该方法中规定,检测在道路区段3上行驶的参考车辆4的各自的速度16,并且将所述各自的速度传输给车辆外部的中央计算机5。对速度16的检测和向中央计算机5的发送可以由参考车辆4的检测装置6或者由基础设施装置7进行,其中,这些装置可以是用于监控交通的相机或雷达系统。对道路区段3上的速度16的检测可以尤其在较长的时间段上进行,以便在外部的中央计算机5中提供检测到的速度16的足够规模。除了分别传输的行驶速度15之外,例如也可以将参考车辆4的各自的车辆类型传输给中央计算机5。车辆类型可以例如是轿车、货车、紧急任务用车或建筑车辆。由此可以根据车辆类型更精确地区分行驶的速度16。所述速度16也可以包括各自的曾以速度15行驶的时间段。由此可能可行的是,将行驶的速度16与一天中的时间、星期几或者季节相关地列出。可以由中央计算机5从接收到的速度16创建用于道路区段3的统计量8。该统计量在此可以例如是平均值、中位数、分布函数或分布。因此,沿道路区段3的速度15可以由统计量8描述。统计量8可以用作参考,该参考用于根据机动车1的当前速度15识别泊车意愿。需要被检查是否存在泊车意愿的机动车1也可以检测该机动车在道路区段3上行驶时的速度15。
26.为了能够确定泊车意愿,可以规定,当关于统计量8的预先确定的标准10被机动车1的速度15满足时,认为存在泊车意愿。预先确定的标准10可以在出厂时预设,或者由机动车1的驾驶员2选择。为了确定该预先确定的标准10是否被满足,可以提供预先确定的比较方法,在该比较方法中将机动车1的速度15与统计量8进行比较和/或评估该速度。可以规定,该比较方法由中央计算机5实施。在这种情况下,机动车1的速度15可以由机动车1的驾驶员辅助设备9传输给中央计算机5。中央计算机可以根据预先确定的比较方法将速度15与统计量8进行比较,以便检查是否满足关于统计量8的预先确定的标准10。预先确定的标准10可以例如包括以绝对值或相对值低于平均速度15。可能也可行的是,预先确定的标准10包括速度分布中的特定的值范围。统计量8和/或预先确定的标准10也可以与一天中的时间、星期几、季节或机动车1的类型有关。其它因素可以例如包括天气条件,以便考虑到参考车辆4在下雨时比在良好的能见度条件下普遍行驶得更慢。标准10也可以适应驾驶员2。因此可以考虑到,具有防御性驾驶风格的驾驶员2比一般驾驶员2普遍开得更慢,并且在较差
的能见度条件下还比一般驾驶员2更强烈地降低其速度15。由此可以单独考虑到驾驶员2的驾驶风格。如果满足关于统计量8的标准10,则可以规定,中央计算机5向机动车1的驾驶员辅助设备9发送通知信号,以便使驾驶员辅助设备9获悉预先确定的标准10被满足。还可以规定,标准10被满足的情况由驾驶员辅助设备9检查。在这种情况下可以规定,在驾驶员辅助设备9中提供统计量8。例如可以规定,当根据机动车1的当前的地理位置识别出机动车1在道路区段3上行驶或者位于道路区段3附近时,由中央计算机5将统计量8传输给驾驶员辅助设备9,该地理位置可以由机动车1传输给中央计算机5。可以规定,当满足预先确定的标准10时,由驾驶员辅助设备9通过输出装置11向驾驶员2输出询问信号12。在此,询问信号可以例如是由扬声器发出的声学信号、显示元件上的显示或方向盘的振动。通过询问信号12可以告知驾驶员2推测出存在泊车意愿。因此可以给驾驶员2提供确认或否认泊车意愿的可能性。可以规定,驾驶员2可以通过驾驶员辅助设备9的输入装置14中的预先确定的用户输入13来确认或否认泊车意愿。这可以例如通过到达作为输入装置14的麦克风处的声学信号、操纵作为输入装置14的按键或触摸屏来实现。驾驶员辅助设备9可以设置用于,在由输入装置14检测到预先确定的用户输入13的情况下,启动机动车1的完全或部分自主的泊车过程或者通过驾驶指示将驾驶员2导航到附近的停车位。当在预先确定的比较方法中识别出泊车意愿时,也可以考虑机动车1相对于在导航系统中输入的地理目的地17的当前位置。在此可以认为,当机动车1位于地理目的地17的附近时,更有可能存在泊车意愿。可以规定,随着相对于地理目的地17的距离减小,降低用于识别泊车意愿的阈值。通过本发明产生的优点是,由于应用与道路区段3上的速度16有关的统计方法,能够可靠地识别出泊车意愿。如果参考车辆4例如比平均的群体速度15行驶得更慢(例如以可自由应用的阈更慢),则可以认为驾驶员2正在寻找停车位。在这种情况下可以在弹出显示中向用户显示已识别出泊车意愿。当驾驶员2确认启动泊车过程时,开始泊车过程。本发明能够实现将机动车1的当前速度15与参考车辆3的群体的平均速度15进行比较,例如当前方没有汽车行驶但尽管如此仍明显比平均的群体驾驶员2更慢地行驶时,可以认为用户想要泊车。在激活的路线引导的情况下可以在目的地17附近调整用于认为要泊车的阈。
27.附图标记列表
28.1机动车
29.2驾驶员
30.3道路区段
31.4参考车辆
32.5中央计算机
33.6检测装置
34.7基础设施装置
35.8统计量
36.9驾驶员辅助设备
37.10标准
38.11输出装置
39.12询问信号
40.13用户输入
41.14输入装置
42.15速度
43.16速度
44.17目的地
45.18通知信号
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1