背景技术:
1、无线通信系统已经过了数代的发展,包括第一代模拟无线电话服务(1g)、第二代(2g)数字无线电话服务(包括过渡的2.5g和2.75g网络)、第三代(3g)具有因特网能力的高速数据无线服务、第四代(4g)服务(例如,长期演进(lte)或wimax)、第五代(5g)服务等。目前在用的有许多不同类型的无线通信系统,包括蜂窝以及个人通信服务(pcs)系统。已知蜂窝系统的示例包括蜂窝模拟高级移动电话系统(amps),以及基于码分多址(cdma)、频分多址(fdma)、正交频分多址(ofdma)、时分多址(tdma)、全球移动接入系统(gsm)tdma变型等的数字蜂窝系统。
2、第五代(5g)移动标准要求更高的数据传输速度、更大数目的连接和更好的覆盖、以及其他改进。根据下一代移动网络联盟,5g标准被设计成向成千上万个用户中的每一者提供数十兆比特每秒的数据率,以及向办公楼层里的数十位员工提供1千兆比特每秒的数据率。应当支持几十万个同时连接以支持大型传感器部署。因此,相比于当前的4g标准,5g移动通信的频谱效率应当显著提高。此外,相比于当前标准,信令效率应当提高并且等待时间应当大幅减少。
技术实现思路
0、概述
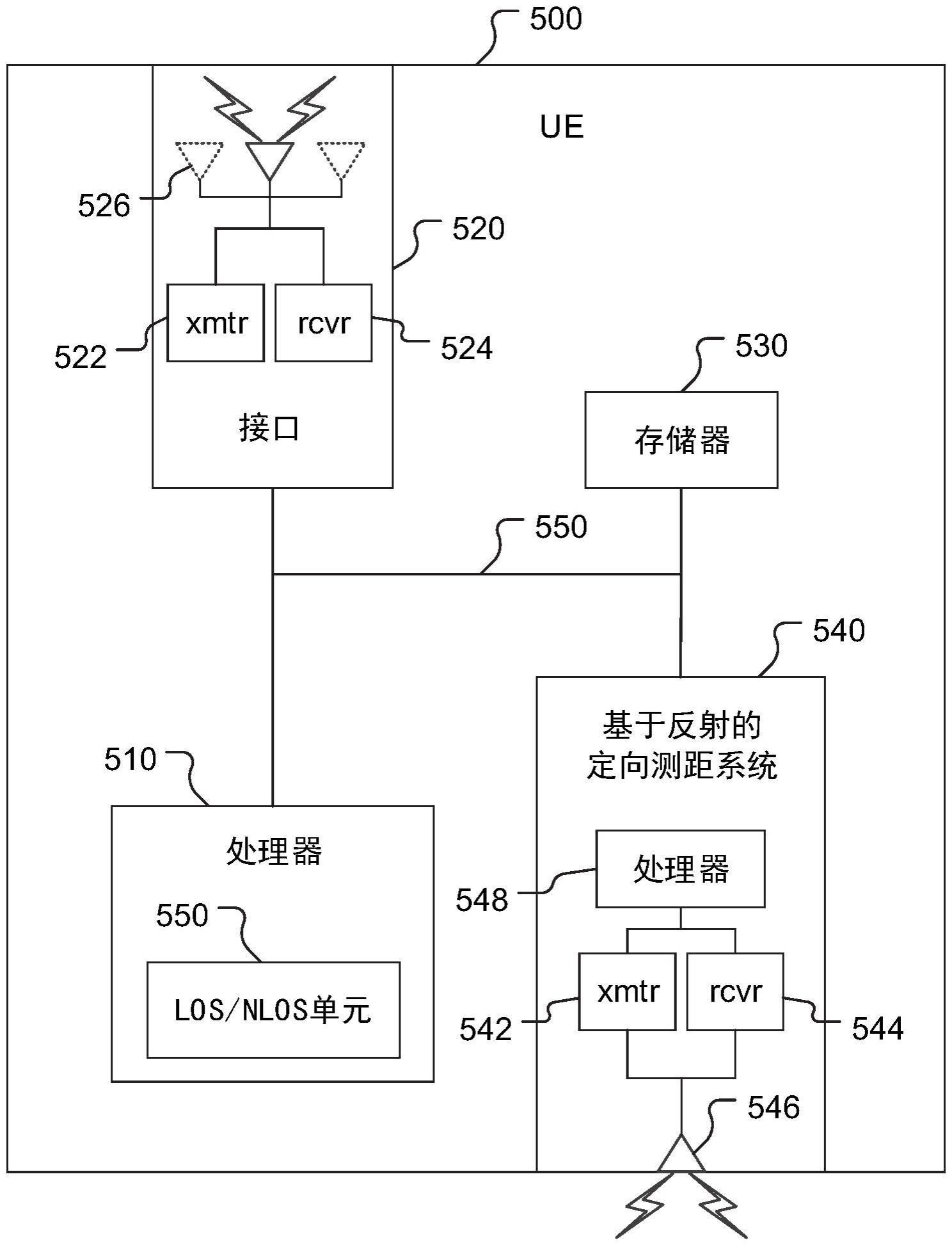
1、在一实施例中,一种ue(用户装备)包括:存储器;无线收发机;基于反射的定向测距系统,其被配置成:确定该ue和反射物之间的方向以及对应的该ue和这些反射物之间的距离;以及处理器,该处理器通信地耦合到该存储器、该无线收发机、以及该基于反射的定向测距系统,并且该处理器被配置成:从该测距系统获得(1)该ue和特定反射物之间的第一方向,和(2)对应于该第一方向的、该ue和该特定反射物之间的第一距离;基于由该无线收发机从定位参考信号(prs)源接收到的prs来确定(3)对应于该prs在该ue处的抵达角的第二方向,和(4)对应于该第二方向的、由该prs从该prs源行进到该ue的第二距离;以及基于该第一方向、该第一距离、该第二方向和该第二距离来确定该第二距离是否是该ue和该prs源之间的视线距离。
2、此类ue的实现可包括以下特征中的一个或多个特征。该处理器被配置成基于该第一方向和该第二方向在第一阈值接近度内并且基于该第一距离和该第二距离在第二阈值接近度内来确定该第二距离是该ue和该prs源之间的视线距离。该处理器被配置成基于该第二方向的角度准确性来确定该第一阈值。该处理器被配置成基于用于接收一个或多个prs的该无线收发机的天线振子的数量来确定该第一阈值。
3、另外或替换地,此类ue的实现可包括以下特征中的一个或多个特征。该处理器被配置成基于该第一方向和该第二方向在第一阈值接近度内并且基于该第一距离和该第二距离在第二阈值接近度外来确定该第二距离是该ue和该prs源之间的非视线距离。该处理器被配置成经由该无线接口发送报告,该报告包括根据该一个或多个prs确定的定位信息以及指示该定位信息是基于视线测量还是基于非视线测量的至少一个视线/非视线指示。该定位信息包括该ue的位置估计。该处理器被配置成:从该测距系统获得(5)该ue和对应的多个反射物之间的多个第一方向,和(6)对应于该多个第一方向的多个第一距离;以及基于该第二方向相对于该多个第一方向中的每个第一方向在阈值接近度外来确定该第二距离是否是该ue和该prs源之间的视线距离,而不使用该多个第一方向指示中的任何一个指示。
4、在一实施例中,一种ue包括:用于传送测距信号并且接收该测距信号的反射的装置;用于基于该测距信号和该测距信号的该反射来确定(1)该ue和反射物之间的第一方向,和(2)对应于该第一方向的、该ue和该反射物之间的第一距离的装置;用于基于由该ue从定位参考信号(prs)源接收到的prs来确定(3)对应于该prs在该ue处的抵达角的第二方向,和(4)对应于该第二方向的、由该prs从该prs源行进到该ue的第二距离的装置;以及用于基于该第一方向、该第一距离、该第二方向和该第二距离来确定该第二距离是否是该ue和该prs源之间的视线距离的装置。
5、此类ue的实现可包括以下特征中的一个或多个特征。该用于确定该第二距离是否是该ue和该prs源之间的视线距离的装置包括用于基于该第一方向和该第二方向在第一阈值接近度内并且基于该第一距离和该第二距离在第二阈值接近度内来确定该第二距离是该ue和该prs源之间的视线距离的装置。该ue包括用于基于该第二方向的角度准确性来确定该第一阈值的装置。该用于确定该第一阈值的装置包括用于基于用于确定该ue和该prs源之间的该第二方向的该装置的天线振子的数量来确定该第一阈值的装置。
6、另外或替换地,此类ue的实现可包括以下特征中的一个或多个特征。该用于确定该第二距离是否是该ue和该prs源之间的视线距离的装置包括用于基于该第一方向和该第二方向在第一阈值接近度内并且基于该第一距离和该第二距离在第二阈值接近度外来确定该第二距离是该ue和该prs源之间的非视线距离的装置。该ue包括用于发送报告的装置,该报告包括根据该一个或多个prs确定的定位信息以及指示该定位信息是基于视线测量还是基于非视线测量的至少一个视线/非视线指示。该定位信息包括该ue的位置估计。
7、在一实施例中,一种确定ue和prs源之间的视线关系的方法包括:传送测距信号;接收该测距信号的反射;基于该测距信号和该测距信号的该反射来确定(1)该ue和反射物之间的第一方向,和(2)对应于该第一方向的、该ue与该反射物之间的第一距离;基于由该ue从该prs源接收到的prs来确定(3)对应于该prs在该ue处的抵达角的第二方向,和(4)对应于该第二方向的、由该prs从该prs源行进到该ue的第二距离;以及基于该第一方向、该第一距离、该第二方向和该第二距离来确定该第二距离是否是该ue和该prs源之间的视线距离。
8、此类方法的实现可包括以下特征中的一项或多项。确定该第二距离是否是该ue和该prs源之间的视线距离包括基于该第一方向和该第二方向在第一阈值接近度内并且基于该第一距离和该第二距离在第二阈值接近度内来确定该第二距离是该ue和该prs源之间的视线距离。该方法包括基于该第二方向的角度准确性来确定该第一阈值。确定该第一阈值包括基于用于确定该ue和该prs源之间的该第二方向的天线振子的数量来确定该第一阈值。
9、另外地或替换地,此类方法的实现可包括以下特征中的一项或多项。确定该第二距离是否是该ue和该prs源之间的视线距离包括基于该第一方向和该第二方向在第一阈值接近度内并且基于该第一距离和该第二距离在第二阈值接近度外来确定该第二距离是该ue和该prs源之间的非视线距离。该方法包括发送报告,该报告包括根据该一个或多个prs确定的定位信息以及指示该定位信息是基于视线测量还是基于非视线测量的至少一个视线/非视线指示。该定位信息包括该ue的位置估计。
10、在一实施例中,一种包括处理器可读指令的非瞬态处理器可读存储介质,这些指令使得ue的处理器为了确定该ue和prs源之间的视线关系进行以下操作:传送测距信号;基于该测距信号和由该ue接收到的该测距信号的反射来确定(1)该ue和反射物之间的第一方向,和(2)对应于该第一方向的、该ue和该反射物之间的第一距离;基于由该ue从该prs源接收到的prs来确定(3)对应于该prs在该ue处的抵达角的第二方向,和(4)对应于该第二方向的、由该prs从该prs源行进到该ue的第二距离;以及基于该第一方向、该第一距离、该第二方向和该第二距离来确定该第二距离是否是该ue和该prs源之间的视线距离。
11、另外地或替换地,此类存储介质的实现可包括以下特征中的一项或多项。使得该处理器确定该第二距离是否是该ue和该prs源之间的视线距离的指令包括使得该处理器基于该第一方向和该第二方向在第一阈值接近度内并且基于该第一距离和该第二距离在第二阈值接近度内来确定该第二距离是该ue和该prs源之间的视线距离的指令。这些指令包括使得该处理器基于该第二方向的角度准确性来确定该第一阈值的指令。使得该处理器确定该第一阈值的这些指令包括使得该处理器基于用于确定该ue和该prs源之间的该第二方向的天线振子的数量来确定该第一阈值的指令。
12、另外地或替换地,此类存储介质的实现可包括以下特征中的一项或多项。使得该处理器确定该第二距离是否是该ue和该prs源之间的视线距离的指令包括使得该处理器基于该第一方向和该第二方向在第一阈值接近度内并且基于该第一距离和该第二距离在第二阈值接近度外来确定该第二距离是该ue和该prs源之间的非视线距离的指令。这些指令包括使得该处理器发送报告的指令,该报告包括根据该一个或多个prs确定的定位信息以及指示该定位信息是基于视线测量还是基于非视线测量的至少一个视线/非视线指示。该定位信息包括该ue的位置估计。