一种水准测距探鱼器的轨迹记录方法及其设备与流程
1.本发明涉及探测技术领域,特别涉及为一种水准测距探鱼器的轨迹记录方法及其设备。
背景技术:
2.通常探鱼器是由接收机和发射器两部分组成,发射器漂浮在水面上,往水下发出声纳信号,声纳技术是基于声波传输原理的。可探测水底状态、轮廓和构成,探鱼器在发出波后依靠声波碰触物体回传的时间来测量距离。与此同时通过反射的声波信号,探鱼器可辨认出物体的位置,大小和构成。声纳信号捕捉到鱼的信息后就会传送到主机,主机根据声纳信号反馈判断生成鱼的图像。可探测水深、水温、鱼/鱼群深度、水底环境等水下信息,目前市场上探鱼器产品种类繁多,各式的功能也很多,从工作原理来分也有许多种类。
3.现有技术的探鱼器中,有一类是使用水下摄像原理,主要包括防水摄像机及水上显示器,并用线缆或者无线网络进行连接,通过显示设备观察水下的情况,同时利用声波在水中的传播和反射特性,通过电声转换和信息处理进行导航和测距的技术,从而发现鱼类,有主动式和被动式两种类型。
4.但是这种探鱼器无法做到在水中精确对探鱼器自身和鱼的真实距离,对探鱼的过程产生了微妙的影响。
5.鉴于此,针对以上背景技术提出的问题,本发明提供一种水准测距探鱼器的轨迹记录方法及其设备,以解决现有探鱼器中无法在水中精确自身和鱼的真实距离。
技术实现要素:
6.本发明旨在解决探鱼器在水中精确对探鱼器自身和鱼的真实距离的问题,提供一种水准测距探鱼器的轨迹记录方法及其设备。
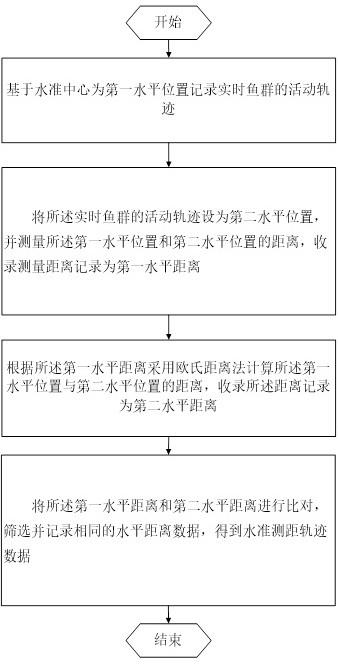
7.本发明提供一种水准测距探鱼器的轨迹记录方法,包括:基于水准中心为第一水平位置记录鱼群实时的活动轨迹;将所述实时鱼群的活动轨迹设为第二水平位置,并测量所述第一水平位置和第二水平位置的距离,收录测量距离记录为第一水平距离;根据所述第一水平距离采用欧氏距离法计算所述第一水平位置与第二水平位置的距离,收录所述距离记录为第二水平距离;将所述第一水平距离和第二水平距离进行比对,筛选并记录相同的水平距离数据,得到水准测距轨迹数据。
8.进一步地,基于水准中心记录实时鱼群的活动轨迹的步骤前还包括:根据终端预设有的水域地理位置,调取可探取鱼群的方位,将所述方位设定为水准方位;校正所述水准方位,精确调整所述水准方位包括经纬度和水下深度,获取精确完成的水准方位设定为水准中心;
基于所述水准中心向周围散射探鱼器预设有的声呐,调取所述声呐回馈的方位数据,设定所述声呐回馈的方位为鱼群实时活动的轨迹记录方位。
9.进一步地,基于水准中心记录实时鱼群的活动轨迹的步骤包括:使用预设有的探射仪观察所述鱼群的活动轨迹包括为鱼群映射出的温度、密度和声速;基于预设的水准中心的水深度伴随的风浪、涌浪和近岸波,推算所述鱼群映射出的温度、密度和声速停留的时间;根据所述鱼群映射出的温度、密度和声速停留的时间获取鱼群实时的活动轨迹。
10.进一步地,测量第一水平位置与第二水平位置的步骤前,还包括:使用预设有的水下测距仪,在所述第一水平位置的方位基础上采用角度交会法获取第二水平位置的水准方位包括为第二水平位置的经纬度和水下深度;根据所述获取的第二水平位置的水准方位数据,校准所述第二水平位置精确方位;基于已精确校准完成的第一水平位置和第二水平位置,使用预设有的激光对焦所述第一水平位置和第二水平位置。
11.进一步地,测量第一水平位置与第二水平位置的步骤包括:根据激光对焦所述第一水平位置与第二水平位置散射的光照密度,调制所述第一水平位置或第二水平位置的角度光信号波长;通过查看所述光信号波长引起的分布折射率,观察所述分布折射率附有的光速和光频;依据所述分布折射率附有的光速和光频计算所述第一水平位置与第二水平位置的测距精度。
12.进一步地,根据第一水平距离采用欧氏距离法计算第二水平距离的步骤包括:依据所述第一水平位置与第二水平位置之间构建一个欧氏距离,设定水平面上所述第一水平位置与第二水平位置两点为a和b点,并设定所述欧氏距离为a(x1,y1)与b(x2,y2);根据预设定的欧氏距离阈值对所述为a(x1,y1)与b(x2,y2)的欧氏距离进行抽稀;从所述抽稀的结果中获取所述欧氏距离中方位距离的极值,并将所述极值代入至所述第一水平距离中,得到所述第二水平距离。
13.进一步地,将第一水平距离和第二水平距离进行比对的步骤包括:以所述第一水平距离为起点,设定与第一水平位置的距离为a海里,采用弗里曼链码法代入所述第一水平距离进行特征提取,得到第一提取特征;以所述第二水平距离为起点,设定与第二水平位置的距离为b海里,采用弗里曼链码法代入所述第二水平距离进行特征提取,得到第二提取特征;对所述第一提取特征和第二提取特征进行定量特征归一化处理,筛选出权重值相似的定量特征,评估所述权重值相似的定量特征相似类。
14.本发明还提供一种水准测距探鱼器的轨迹设备,包括:测量模块,用于基于水准中心为第一水平位置记录实时鱼群的活动轨迹;将所述实时鱼群的活动轨迹设为第二水平位置,并测量与所述第一水平位置的距离,收录测量距
离记录为第一水平距离;比对模块,用于根据所述第一水平距离采用欧氏距离法计算所述第一水平位置与第二水平位置的距离,收录所述距离记录为第二水平距离;将所述第一水平距离和第二水平距离进行比对,筛选并记录相同的水平距离数据。
15.进一步地,测量模块还包括:记录子模块,用于基于水准中心为第一水平位置记录实时鱼群的活动轨迹;测量子模块,用于将所述实时鱼群的活动轨迹设为第二水平位置,并测量与所述第一水平位置的距离,收录测量距离记录为第一水平距离。
16.进一步地,比对模块还包括:计算子模块,用于根据所述第一水平距离采用欧氏距离法计算所述第一水平位置与第二水平位置的距离,收录所述距离记录为第二水平距离;比对子模块,用于将所述第一水平距离和第二水平距离进行比对,筛选并记录相同的水平距离数据。
17.本发明提供了水准测距探鱼器的轨迹记录方法及其设备,具有以下有益效果:1、本发明通过采用欧氏距离法精确测量探鱼器和鱼群的距离,有效提高了探鱼器的容错率;2、本发明通过采用弗里曼链码法对水平距离进行特征提取,有效降低了测量距离时产生的误差。
附图说明
18.图1为本发明水准测距探鱼器的轨迹记录方法一个实施例的整体步骤流程图;图2为本发明水准测距探鱼器的轨迹记录设备一个实施例的工作步骤流程图;本发明为目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
19.应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
20.下面将结合本发明的实施例中的附图,对本发明的实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.参考附图1,为本发明一实施例中的水准测距探鱼器的轨迹记录方法,包括:基于水准中心为第一水平位置实时记录鱼群的活动轨迹;将所述实时鱼群的活动轨迹设为第二水平位置,并测量所述第一水平位置和第二水平位置的距离,收录测量距离记录为第一水平距离;根据所述第一水平距离采用欧氏距离法计算所述第一水平位置与第二水平位置的距离,收录所述距离记录为第二水平距离;将所述第一水平距离和第二水平距离进行比对,筛选并记录相同的水平距离数据,得到水准测距轨迹数据。
22.在具体实施例中:根据终端预设有的水域地理位置,调取可探取鱼群的方位,将方
位设定为水准方位,校正水准方位,精确调整水准方位包括经纬度和水下深度,获取精确完成的水准方位设定为水准中心,基于水准中心向周围散射探鱼器预设有的声呐,调取声呐回馈的方位数据,设定声呐回馈的方位为鱼群实时活动的轨迹记录方位;使用预设有的探射仪观察鱼群的活动轨迹包括为鱼群映射出的温度、密度和声速,基于预设的水准中心的水深度伴随的风浪、涌浪和近岸波,推算鱼群映射出的温度、密度和声速停留的时间,根据鱼群映射出的温度、密度和声速停留的时间获取鱼群实时的活动轨迹;将实时鱼群的活动轨迹设为第二水平位置,使用预设有的水下测距仪,在第一水平位置的方位基础上采用角度交会法获取第二水平位置的水准方位包括为第二水平位置的经纬度和水下深度;根据获取的第二水平位置的水准方位数据,校准第二水平位置精确方位;基于已精确校准完成的第一水平位置和第二水平位置,使用预设有的激光对焦第一水平位置和第二水平位置;根据激光对焦第一水平位置与第二水平位置散射的光照密度,调制第一水平位置或第二水平位置的角度光信号波长,通过查看光信号波长引起的分布折射率,观察分布折射率附有的光速和光频,依据分布折射率附有的光速和光频计算第一水平位置与第二水平位置的测距精度,收录测量距离记录为第一水平距离;依据第一水平位置与第二水平位置之间构建一个欧氏距离,设定水平面上第一水平位置与第二水平位置两点为a和b点,并设定欧氏距离为a(x1,y1)与b(x2,y2),根据预设定的欧氏距离阈值对为a(x1,y1)与b(x2,y2)的欧氏距离进行抽稀,从抽稀的结果中获取欧氏距离中方位距离的极值,并将极值代入至第一水平距离中,得到第二水平距离;收录距离记录为第二水平距离;以第一水平距离为起点,设定与第一水平位置的距离为a海里,采用弗里曼链码法代入第一水平距离进行特征提取,得到第一提取特征,以第二水平距离为起点,设定与第二水平位置的距离为b海里,采用弗里曼链码法代入第二水平距离进行特征提取,得到第二提取特征,对第一提取特征和第二提取特征进行定量特征归一化处理,筛选出权重值相似的定量特征,评估权重值相似的定量特征相似类,筛选并记录相同的水平距离数据,得到水准测距轨迹数据。
23.在一个实施例中:基于水准中心记录实时鱼群的活动轨迹的步骤前还包括:根据终端预设有的水域地理位置,调取可探取鱼群的方位,将所述方位设定为水准方位;校正所述水准方位,精确调整所述水准方位包括经纬度和水下深度,获取精确完成的水准方位设定为水准中心;基于所述水准中心向周围散射探鱼器预设有的声呐,调取所述声呐回馈的方位数据,设定所述声呐回馈的方位为鱼群实时活动的轨迹记录方位。
24.在具体实施例中:在确认了终端对应标识的水域地理位置时,则可以进一步对相应的位置最大簇中取平均的经纬度信息,获取经纬度信息的原始数据及其水域地理位置标识,原始数据包括经纬度密度数据和/或经纬度标签,获取水域地理位置标识以及水域地理位置对应的经纬度信息,基于所述经纬度原始数据和水域地理位置标识的对应关系,将与经纬度原始数据对应的经纬度数据作为与位置标识对应的经纬度数据,进一步提高位置标识及其经纬度数据的清晰度,将位置标识及其经纬度数据经过坐标系转化得到平均后的经纬度数值作为水域地理位置标识相应的最终经纬度信息;
根据最终经纬度信息通过图像处理获得相应位置,在初始状态下,把偏差作为最优化目标,待标定参数作为待优化变量,利用遗传算法不断优化,模型参数接近准确值,预测位置与真实位置偏差减小,进行数回合的迭代计算后获得基于坐标处理得到的水位计算值为水下深度,根据最终经纬度信息和水位计算值获取水准中心。
25.在一个实施例中:基于水准中心记录实时鱼群的活动轨迹的步骤包括:使用预设有的探射仪观察所述鱼群的活动轨迹包括为鱼群映射出的温度、密度和声速;基于预设的水准中心的水深度伴随的风浪、涌浪和近岸波,推算所述鱼群映射出的温度、密度和声速停留的时间;根据所述鱼群映射出的温度、密度和声速停留的时间获取鱼群实时的活动轨迹。
26.在具体实施例中:对于待计算的温度、密度和声速停留的时间,测量其在不同的深度和水压下,作为基础数据,同时输入三组数据是必要的,避免造成计算结果误差过大,无法满足精度要求,较多的输入数据有助于提高计算结果的精确性,由于声速是由温度、压力和组分共同决定的,如果输入三组数据,可以大致推断出鱼群实时活动的轨迹,不过误差较大,实际应用中没有太大意义,如果要获取精度相对较高的组分数据,一般至少输入十组数据,可以保证数据的精度优于1%,更多的输入数据可以进一步提高计算结果的准确性,根据反复计算各种不同的情况,降低误差;为了验证结果的不确定性,生成排列组合若干个,每组组分计算十组不同温度和压力下以声速作为输入值,计算组分与相应时间,然后与标准要求做比较,计算得出误差值;在一个实施例中:测量第一水平位置与第二水平位置的步骤前,还包括:使用预设有的水下测距仪,在所述第一水平位置的方位基础上采用角度交会法获取第二水平位置的水准方位包括为第二水平位置的经纬度和水下深度;根据所述获取的第二水平位置的水准方位数据,校准所述第二水平位置精确方位;基于已精确校准完成的第一水平位置和第二水平位置,使用预设有的激光对焦所述第一水平位置和第二水平位置。
27.在具体实施例中:以水下测距仪为测定点一,第一水平位置为测定点二,在测定点一以测定点二为后视点,通过测设第二水平位置的水平角β1,即可确定测定点一和β1的方向,同理,在测定点二以测定点一为后视点,通过测设第二水平位置的水平角β2,即可确定测定点二和β2的方向,即可确定第二水平位置的平面位置,将第二水平位置的平面位置做标识,根据两个水平角β1和β2向逆方向测设,由测设站点得到第二水平位置的经纬度和水下深度;使用激光对焦第一水平位置和第二水平位置,假设光的出射位置为c,光的接收位置为t1和t2,测距仪与目标物体的距离为w,相位的变化为g,光的传播时间为t,则相位g和时间t之间的关系为:
其中
∆
φ为整个波长的数量,λ为一个波长内的相位。
28.在一个实施例中:测量第一水平位置与第二水平位置的步骤包括:根据激光对焦所述第一水平位置与第二水平位置散射的光照密度,调制所述第一水平位置或第二水平位置的角度光信号波长;通过查看所述光信号波长引起的分布折射率,观察所述分布折射率附有的光速和光频;依据所述分布折射率附有的光速和光频计算所述第一水平位置与第二水平位置的测距精度。
29.在具体实施例中:水的折射率的变化而变化,即光在水中的折射率与光在真空中的折射率是不同的。c是光的速度,γ是激光的频率,它由光源的震荡特性决定,并且γ并不会随着介质折射率的变化而变化;水的折射率决定了光波长、密度、温度以及水的压力。同时,水的盐分、温度、压力及速率分布会引起折射率的非均匀分布,这会很大程度上影响激光测距仪的结果。光的吸收损耗会导致光束能量的减少,也会导致传输距离的减少。光的散射作用会影响光束的方向,并且会极大的降低测距精度;在水中传播了长度l后,激光的光能变化情况可用下式表示:其中,i是传播了距离后激光的能量,i0是初始能量,l是传播距离,θ(λ)与ψ(λ)分别是吸收与散射的损耗系数,它与激光的波长有光。
30.在一个实施例中:根据第一水平距离采用欧氏距离法计算第二水平距离的步骤包括:依据所述第一水平位置与第二水平位置之间构建一个欧氏距离,设定水平面上所述第一水平位置与第二水平位置两点为a和b点,并设定所述欧氏距离为a(x1,y1)与b(x2,y2);根据预设定的欧氏距离阈值对所述为a(x1,y1)与b(x2,y2)的欧氏距离进行抽稀;从所述抽稀的结果中获取所述欧氏距离中方位距离的极值,并将所述极值代入至所述第一水平距离中,得到所述第二水平距离。
31.在具体实施例中:基于第一水平位置和第二水平位置建立一个二维平面,二维平面上有两点为a点和b点,设定两点之间的欧氏距离公式为:通过改变a点和b点的初始位置,采用不同的欧氏距离阈值对设定的a点和b点间的欧氏距离进行两次抽稀,并比较两次抽稀的均方差,而后通过均方差对方位距离的极值精准指标做判断,在保证精度的前提下确定极值;第一次抽稀,调整欧氏距离阈值为(0.5*欧氏距离)对方位距离进行抽稀,将抽稀得到的方位坐标(x,y)代入表达式中,得到基于最优方位距离趋势面的预测值z,
第二次抽稀,调整欧氏距离阈值为(0.7*欧氏距离)对方位距离进行抽稀,将抽稀得到的方位坐标(x
²
,y
²
)代入表达式中,得到基于最优方位距离去世面的预测值z
²
,取1作为均方差限差,当均方差限差大于1时,则方位距离的精确指标达到最优;当均方差限差小于1时,则方位距离的精确值表下降,可相应提高欧氏距离阈值,保证方位距离趋势面的完整性。
32.在一个实施例中:将第一水平距离和第二水平距离进行比对的步骤包括:以所述第一水平距离为起点,设定与第一水平位置的距离为a海里,采用弗里曼链码法代入所述第一水平距离进行特征提取,得到第一提取特征;以所述第二水平距离为起点,设定与第二水平位置的距离为b海里,采用弗里曼链码法代入所述第二水平距离进行特征提取,得到第二提取特征;对所述第一提取特征和第二提取特征进行定量特征归一化处理,筛选出权重值相似的定量特征,评估所述权重值相似的定量特征相似类。
33.在具体实施例中:常用的弗里曼链码按照中心像素点邻接方向个数的不同,分为4连通链码和8连通链码。4连通链码的邻接点有4个,分别在中心点的上、下、左和右。8连通链码比4连通链码增加了4个斜方向,因为任意一个像素周围均有8个邻接点,而8连通链码正好与像素点的实际情况相符,能够准确地描述中心像素点与其邻接点的信息;按照第二水平距离的水平、垂直和两条对角线方向,可以为相邻的两个像素点定义为8个方向符:1、2、3、4、5、6、7、8,基于8个方向符设定8个测设点,每相隔1/8海里为一个测设点,将8个测设点通过线段相连接,构成一组弗里曼数列码,根据8个不同测设点的布置方位得到不同的链码表示,任选一点得到原链码,将链码看作由各方向数构成的n位自然数,将该码按一个方向循环,使其构成的n位自然数最小,此时就形成起点唯一的链码,为提取完毕的特征;给定一个从任意点开始得到的链码,把它看作一个由各方向数构成的自然数;将这些方向数依一个方向循环,以使它们所构成的自然数的值最小, 利用一系列具有特定长度和方向的相连的直线段来表示目标的边界,将这样转换后所对应的链码起点作为这个边界的归—化链码的起点,将链码旋转归一化,用链码表示给定目标的边界,筛选链码与边界的链码数为相似的定量特征,通过归一化评估链码数的权重值,由于归一化得到的链码不具备旋转不变性,所以得到归一化链码相似类为具有平移不变性,也具备唯一性的定量特征。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1