一种基于加权欧拉ESPRIT的多阵列非圆源直接定位方法
一种基于加权欧拉esprit的多阵列非圆源直接定位方法
技术领域
1.本发明涉及多阵列非圆源定位技术领域,特别是涉及一种基于加权欧拉esprit的多阵列非圆源直接定位方法。
背景技术:
2.传统的直接定位技术(direct position determination,dpd)大多是针对未知信号进行研究的,从信息论的角度来讲,所能利用的原始信息越多,理论上算法的性能就越好。研究表明,在建立算法模型时考虑目标源的信号特征能够进一步提升定位精度。而在现代通信系统中,调幅信号、二进制相移键控、脉冲幅度调制信号、正交相移键控信号等都属于非圆(non-circular,nc)信号类型,因此有关非圆信号直接定位算法的研究具有重要的实际应用意义。
3.现有的非圆信号直接定位算法忽略了路径传播损耗对算法性能的影响。在实际应用中,当同一辐射目标的非圆信号冲击不同的观测基站时,不同观测站的信噪比往往不同且不稳定。此外,利用目标信号的非圆特征扩展阵列孔径的同时,还带来了高维搜索,计算复杂度大大增加。为了解决上述问题,本发明提出了一种基于加权欧拉esprit的多阵列非圆源直接定位方法。
技术实现要素:
4.有鉴于此,本发明的目的在于提供一种基于加权欧拉esprit的多阵列非圆源直接定位方法,在保证估计性能的同时显著降低了计算复杂度,易于实时处理。
5.为了实现上述目的,本发明采用如下技术方案:
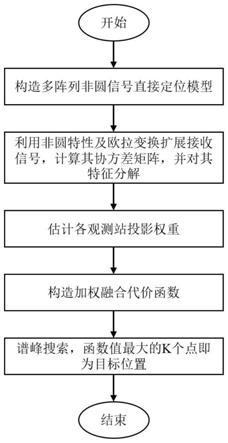
6.一种基于加权欧拉esprit的多阵列非圆源直接定位方法,所述定位方法包括如下步骤:
7.步骤s1、构建多阵列非圆信号直接定位模型,获得各观测基站的接收信号;
8.步骤s2、根据非圆特性及欧拉变换,将步骤s1中获取的接收信号进行扩展,得到扩展后的接收信号,再根据该扩展后的接收信号,计算其协方差矩阵;
9.步骤s3、根据步骤s2中得到的协方差矩阵,估计各观测基站的投影权重;
10.步骤s4、构建加权融合代价函数f
nc-euler-wesprit
;
11.步骤s5、对步骤s4中构建的加权融合代价函数进行谱峰搜索,得到目标位置的精确估计。
12.进一步的,在所述步骤s1中,针对第l个观测基站,其接收信号为:
[0013][0014]
公式(1)中,为每个基站的阵列流型,为导向矢量,其中d为
阵元间隔,λ表示波长;根据自由空间传播损耗模型,假设辐射源信号功率均为pk,在观测位置u
l
=[x
l
,y
l
]
t
处接收到的来自第k个辐射源pk=[xk,yk]
t
的信号的功率为p
l,k
,
[0015]
则为路径传播损耗系数,为传播损耗矩阵,表示一个实值矢量;n
l
(t)表示高斯白噪声矢量。
[0016]
进一步的,在所述步骤s1中,只考虑非圆率为1的非圆信号,则假设表示非圆相位,表示信号的幅值,则得到:
[0017][0018][0019]
进一步的,所述步骤s2具体包括:
[0020]
步骤s201、将步骤s1中获取的接收信号扩展为:
[0021][0022]
在公式(4)中,h
l
表示为扩展后的阵列流型,并且表示为扩展后的阵列流型,并且其中(
·
)
*
、re(
·
)、im(
·
)分别表示共轭、取实部和虚部;
[0023]
步骤s202、定义:则方向矩阵h
l
表示为:
[0024]
[0025]
在公式(5)中,在公式(5)中,
[0026]
步骤s203、先计算接收信号的协方差矩阵,表达式为其中,t表示快拍数,(
·
)h表示共轭转置;再对该协方差矩阵进行特征分解,得到:其中,表示为信号子空间,表示为噪声子空间。
[0027]
进一步的,所述步骤s3具体包括:
[0028]
步骤s301、重写协方差矩阵r
l
:
[0029][0030]
公式(6)中,i
2m
×
2m
是2m
×
2m维单位矩阵;
[0031]
步骤s302、假设噪声功率在整个观测过程中不变,不同观测位置的信噪比正比于协方差矩阵r
l
被分解成:则协方差矩阵的特征值表示为:
[0032][0033]
公式(7)中,是rs的k个非零特征值,代表了接收信号功率,则噪声功率估计值表示为:
[0034]
步骤s303、根据步骤s302中得到的协方差矩阵的特征值以及噪声功率估计值,得到第个观测基站的接收信号功率估计值,表达式为:则l个观测站的投影权重为:
[0035]
进一步的,所述步骤s4具体包括:
[0036]
步骤s401、根据信号子空间与噪声子空间的正交性,得到:
其中,存在一个可逆矩阵t使得
[0037]
步骤s402、定义可逆矩阵,表达式为:
[0038][0039][0040]
公式(8)和公式(9)中,公式(8)和公式(9)中,
[0041]
步骤s403、定义为零矩阵,则得到:
[0042][0043]
公式(10)中,t1h
l
的第k列元素是
[0044][0045]
步骤s404、相应的,得到:
[0046]
步骤s405、根据和差化积公式,得到:
[0047]
t1h
l
=t2h
l
ξ
l
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0048]
公式(8)中,
[0049]
步骤s406、根据最小二乘,得到:
[0050][0051]
公式(12)中,(
·
)
+
表示moore-penrose伪逆;
[0052]
步骤s407、通过对公式(12)中的进行特征分解,得到γ
l,k
(k=1,2,
…
k),再联合l个观测站的数据,构造加权融合谱函数,表达式为:
[0053][0054]
公式(13)中,v
l,k
(k=1,2,
…
k)代表对角矩阵ξ
l
的第k个对角元素。
[0055]
进一步的,在所述步骤s5中,当对加权融合代价函数进行谱峰搜索时,以函数值最大的k个点为所述目标位置的精确估计。
[0056]
本发明的有益效果是:
[0057]
本发明所提算法的估计精度优于传统两步定位技术、子空间数据融合技术(subspace data fusion,sdf);与传统两步定位技术和子空间数据融合算法相比,所提出的方法具有更多的自由度,能够识别更多的目标;本发明可以在不损失估计性能的情况下显著降低计算复杂度。
附图说明
[0058]
图1为实施例1中提供的一种基于加权欧拉esprit的多阵列非圆源直接定位方法的流程示意图;
[0059]
图2为实施例1中提供的多阵列非圆信号直接定位模型的示意图;
[0060]
图3为实施例1中提供的定位方法与与传统定位方法,在算法运行时间随搜索格点数变化方面的示意图;
[0061]
图4为实施例1中提供的定位方法与传统定位方法在不同信噪比下的rmse性能示意图;
[0062]
图5为实施例1中提供的定位方法与传统定位方法在不同快拍数下的rmse性能示意图。
具体实施方式
[0063]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0064]
实施例1
[0065]
参见图1-图5,本实施例提供一种基于加权欧拉esprit的多阵列非圆源直接定位方法,该方法的具体步骤如图1所示,该方法具体包括如下步骤:
[0066]
步骤1:构造如图2所示的多阵列非圆信号直接定位模型;得到接收信号信息r
l
(t)。
[0067]
具体的说,在本实施例中,该步骤1具体包括:
[0068]
第l个观测基站的接收信号为其中,为每个基站的阵列流型,为导向矢量,其中d为阵元间隔,λ表示波长。
[0069]
根据自由空间传播损耗模型,假设辐射源信号功率均为pk,在观测位置u
l
=[x
l
,y
l
]
t
处接收到的来自第k个辐射源pk=[xk,yk]
t
的信号的功率为p
l,k
,则为路径传播损耗系数,为传播损耗矩阵。
[0070]
具体的说,在本实施例中,只考虑非圆率为1的非圆信号,它可以表示为假设表示非圆相位,表示信号的幅值,则可以得到:
[0071][0072][0073]
公式中,是是一个实值矢量;n
l
(t)表示高斯白噪声矢量。
[0074]
步骤2:根据非圆特性及欧拉变换,各观测基站的接收信号扩展为:
[0075][0076]
其中h
l
可以看成是扩展后的阵列流型,并且
[0077][0078][0079]
其中(
·
)
*
、re(
·
)、im(
·
)分别表示共轭、取实部和虚部。
[0080]
定义那么方向矩阵h
l
可以表示成
[0081][0082]
公式中,
[0083]
然后可以计算协方差矩阵为其中,t表示快拍数,(
·
)h表示共轭转置;
[0084]
对该协方差矩阵进行特征分解,得:
[0085][0086]
假设λ
l,m
(m=1,2,
…
,2m)表示按从大到小排序后的特征值,对应的特征向量用e
l,m
(m=1,2,
…
,2m)表示,则信号子空间表示为噪声子空间表示为
[0087]
步骤3:估计各观测站投影权重。
[0088]
具体的说,在本实施例中,该步骤3具体包括:
[0089]
重写协方差矩阵r
l
:
[0090][0091]
其中,i
2m
×
2m
是2m
×
2m维单位矩阵;
[0092]
假设噪声功率在整个观测过程中不变,不同观测位置的信噪比正比于协方差矩阵r
l
可以被分解成:
[0093][0094]
协方差矩阵的特征值表示为:
[0095][0096]
其中,是rs的k个较大的非零特征值,代表了接收信号功率,则噪声功率估计值表示为:
[0097][0098]
第l个观测站的接收信号功率估计值为:
[0099][0100]
然后可以得到第l个观测站的投影权重
[0101]
步骤4:构造加权融合代价函数f
nc-euler-wesprit
。
[0102]
具体的说,在本实施例中,该步骤4具体包括:
[0103]
根据信号子空间与噪声子空间的正交性,可以得到
[0104][0105]
也就是说存在一个可逆矩阵t使得
[0106][0107]
定义可逆矩阵
[0108][0109][0110]
公式中,
[0111]
是一个零矩阵。然后可以得到
[0112][0113]
其中,t1h
l
的第k列元素是
[0114][0115]
类似地,
[0116][0117]
其中,t2h
l
的第k列元素是
[0118][0119]
然后根据和差化积公式,可以得到
[0120]
t1h
l
=t2h
l
ξ
l
[0121]
公式中,
[0122]
根据最小二乘,可以得到
[0123][0124]
其中,(
·
)
+
表示moore-penrose伪逆。然后通过对进行特征分解,可以很容易得到γ
l,k
(k=1,2,
…
k)。
[0125]
最后,通过联合l个观测站的数据,可以构造加权融合谱函数
[0126][0127]
其中,v
l,k
(k=1,2,
…
k)代表对角矩阵ξ
l
的第k个对角元素。
[0128]
步骤5:通过谱峰搜索得到目标位置的精确估计。
[0129]
具体的说,对步骤4中的加权融合代价函数f
nc-euler-wesprit
进行谱峰搜索,函数值最大的k个点即为目标位置。
[0130]
本实施例提供的方法得到的空间自由度为dof=2m-1,而传统均匀线阵在相同阵元数的情况下,空间自由度为dof=m-1,增加了一定的自由度。图3为本实施例所述方法与传统定位方法的运行时间随搜索格点数变化的示意图。仿真条件为:3个目标,6个观测基站,每个基站配备阵元数为5的均匀线阵,快拍数(snapshot)为200,信噪比为15db。从图3可以看出,本发明所述方法(nc-euler-wesprit)将复数矩阵转化为实数矩阵,相比转化前的方法(nc-esprit),计算复杂度显著降低。
[0131]
本实施例提供方法的性能估计标准为均方根误差(root mean square error,rmse)定义为:
[0132]
[0133]
其中,mon为蒙特卡罗实验次数,k表示目标个数,表示第mn次实验的估计值,xk表示实际值。
[0134]
图4为本实施例所述方法与传统直接定位方法根均方误差(rmse)随信噪比(snr)变化的性能曲线图。仿真条件为:有3个目标,它们的非圆相位和位置分别是(10,20,30)和[(-3000,-3000),(0,0),(3000,3000)],6个观测基站[(-6000,-9000)、(-3600,-7000)、(-1200,-10000)、(1200,-8000)、(3600,-11000)、(6000,-12000)],每个基站配备阵元数为6的均匀线阵,快拍数为100,仿真1000次。从图4可以看出,本实施例实现了更高的定位精度。
[0135]
图5为本实施例所述方法与传统直接定位方法根均方误差(rmse)随快拍数(snapshot)变化的性能曲线图。仿真条件为:有3个目标,它们的非圆相位和位置分别是(10,20,30)和[(-3000,-3000),(0,0),(3000,3000)],6个观测基站[(-6000,-9000)、(-3600,-7000)、(-1200,-10000)、(1200,-8000)、(3600,-11000)、(6000,-12000)],每个基站配备阵元数为6的均匀线阵,信噪比(snr)为15db,仿真1000次。从图5可以看出,本实施例所提方法相比传统两步定位,直接定位方法具有更好的估计性能
[0136]
综上所述,从仿真效果图的分析可知,本发明提出的一种基于基于加权欧拉esprit的多阵列非圆源直接定位方法能够有效增大阵列孔径,具有更高的空间自由度和定位精度,能估计更多目标。此外,该方法在保证估计性能的同时通过欧拉变换显著降低了计算复杂度。本发明未详述之处,均为本领域技术人员的公知技术。
[0137]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1