一种基于恒星与卫星联合的全天时光学导航方法和装置
1.本发明涉及导航技术与航天技术领域,尤其涉及一种基于恒星与卫星联合的全天时光学导航方法和装置。
背景技术:
2.中国航天科技集团的“彩虹”太阳能无人机、美国facebook的“阿奎拉”太阳能无人机、欧洲空客的“西风之神”太阳能无人机等长航时太阳能无人机,可在大气层内持续飞行数月,飞行高度可达20千米,是一种革命性的航空器,可作为一颗“高空伪卫星”,在区域侦察、环境监测、搜索跟踪、信息收拾、宽带通信、时空物联网服务等领域及重大灾害时紧急提供外界通信服务上具有广泛的应用前景。现有的长航时无人机导航系统严重依赖北斗、gps等无线电卫星导航,但基于无线电卫星的导航模式极易受到欺骗与干扰。
3.微惯性技术(mimu)的快速发展为无人系统自主导航的实现创造了条件,但mimu精度较低,直接用惯性导航算法得到的无人系统导航结果会迅速发散,不能完成长航时的导航任务。星敏感器可以测量载体的姿态信息,通过与mimu的测量结果进行解耦,可以获得地理信息,但只能在夜间使用,且在动态条件下mimu会导致导航精度严重受限,无法满足导航的需求。
技术实现要素:
4.本发明旨在至少在一定程度上解决相关技术中的技术问题之一。
5.为此,本发明的目的在于解决卫星无线电拒止环境下的高精度全天时导航问题,提出了一种基于恒星与卫星联合的全天时光学导航方法。
6.本发明的另一个目的在于提出一种基于恒星与卫星联合的全天时光学导航装置。
7.为达上述目的,本发明一方面提出了基于恒星与卫星联合的全天时光学导航方法,包括以下步骤:
8.在第一预设时段,利用星敏感器观测恒星,获得第一最优姿态矩阵;利用红外光学敏感器观测卫星,并基于所述第一姿态矩阵得到第一卫星观测方程;基于所述第一卫星观测方程通过先验信息与气压计耦合获得的高程信息构建第一指标函数;根据所述第一指标函数得到第一最优经纬度;在第二预设时段,利用太阳敏感器观测太阳得到太阳观测矢量;利用红外光学敏感器观测卫星得到第二卫星观测方程;基于所述太阳观测矢量和所述第二卫星观测方程,建立太阳观测单位矢量与卫星观测单位矢量的角度约束方程;基于所述角度约束方程以及所述先验信息与气压计耦合得到的高程信息构建第二指标函数;基于所述第二指标函数得到第二最优经纬度;基于所述第二最优经纬度并根据所述卫星观测方程的卫星观测矢量与所述太阳观测矢量,得到第二最优姿态矩阵。
9.本发明实施例的基于恒星与卫星联合的全天时光学导航方法,其中,导航装置由星敏感器、太阳敏感器和红外光学敏感器组成,星敏感器观测恒星,太阳敏感器观测太阳、红外光学敏感器观测搭载红外光源的卫星,通过红外编码光源获得卫星编号,实现卫星精
密星历的获取,从而建立无限距离恒星与有限距离卫星的联合观测方程,并提出夜间恒星与卫星、白天太阳与卫星的姿态与位置解耦方法,实现导航装置全天时位置与姿态的获取。相较于传统卫星无线电导航,本发明利用自然天体和人造天体,通过光电测量手段,实现在卫星无线电拒止环境下的高精度全天时导航,有效解决无线电被干扰欺骗的难题,可作为无人飞行器等无人系统备用导航方法与装置。
10.另外,根据本发明上述实施例的基于恒星与卫星联合的全天时光学导航方法还可以具有以下附加的技术特征:
11.进一步地,所述第一卫星观测方程为:
[0012][0013]
其中,s
eci
为卫星在eci下的有距离矢量,为最优状态矩阵,s
*
为卫星在红外光学敏感器的矢量,k(t)为敏感器到卫星的距离,为系统在ecef坐标下的位置,为ecef坐标系到eci坐标系的转换矩阵,为红外光学敏感器与星敏感器的安装矩阵。
[0014]
进一步地,所述第一指标函数为:
[0015][0016]
进一步地,所述在第一预设时段,利用星敏感器观测恒星,获得第一最优姿态矩阵,包括:
[0017]
根据星敏感器的原理:
[0018][0019]
其中,p
eci|i
为恒星在eci坐标系下的矢量,p
st|i
为恒星在星敏感器坐标系下的矢量;
[0020]
通过对多个恒星成像,获得星敏感器坐标系到eci坐标系下的第一最优姿态矩阵
[0021]
进一步地,所述第二卫星观测方程为:
[0022][0023]
其中,s
ecef
为卫星在ecef坐标系下的矢量,由卫星的实时经纬高(φs,λs,hs)解算,k(t)表示观测点到卫星的距离,为观测点在ecef坐标系中的矢量,为系统敏感器安装矩阵。
[0024]
进一步地,所述角度约束方程为:
[0025][0026]
其中,为太阳观测单位矢量,为卫星观测单位矢量。
[0027]
进一步地,所述第二指标函数为:
[0028][0029]
其中,d
enu
(δx,δy,δz)表示在预设两个时刻内,敏感器在enu坐标系内的位置变化。
[0030]
进一步地,在预设t1时刻观测点经纬高(φ,λ,h),构建如下方程,求解出第二最优姿态矩阵
[0031][0032]
进一步地,所述恒星、太阳与卫星观测矢量的表达式为:
[0033][0034]
其中,v
*
分别表示恒星观测矢量p
st
、太阳观测矢量r
*
与卫星观测矢量s
*
,(x0,y0)表示星敏感器、太阳敏感器与红外光学敏感器的中点坐标,(xi,yi)表示星点、太阳与卫星的成像坐标,f
dev
分别表示星敏感器的焦距f
st
、太阳敏感器的焦距f
sun
与红外光学敏感器的焦距f
ir
。
[0035]
为达到上述目的,本发明另一方面提出了一种基于恒星与卫星联合的全天时光学导航装置,包括:
[0036]
第一预设时段模块,用于在第一预设时段,利用星敏感器观测恒星,获得第一最优姿态矩阵;利用红外光学敏感器观测卫星,并基于所述第一姿态矩阵得到第一卫星观测方程;基于所述第一卫星观测方程通过先验信息与气压计耦合获得的高程信息构建第一指标函数;根据所述第一指标函数得到第一最优经纬度;第二预设时段模块,用于在第二预设时段,利用太阳敏感器观测太阳得到太阳观测矢量;利用红外光学敏感器观测卫星得到第二卫星观测方程;基于所述太阳观测矢量和所述第二卫星观测方程,建立太阳观测单位矢量与卫星观测单位矢量的角度约束方程;基于所述角度约束方程以及所述先验信息与气压计耦合得到的高程信息构建第二指标函数;基于所述第二指标函数得到第二最优经纬度;基于所述第二最优经纬度并根据所述卫星观测方程的卫星观测矢量与所述太阳观测矢量,得到第二最优姿态矩阵。
[0037]
本发明实施例的基于恒星与卫星联合的全天时光学导航装置,导航装置由星敏感器、太阳敏感器和红外光学敏感器组成,星敏感器观测恒星,太阳敏感器观测太阳、红外光学敏感器观测搭载红外光源的卫星,通过红外编码光源获得卫星编号,实现卫星精密星历的获取,从而建立无限距离恒星与有限距离卫星的联合观测方程,并提出夜间恒星与卫星、白天太阳与卫星的姿态与位置解耦方法,实现导航装置全天时位置与姿态的获取。相较于传统卫星无线电导航,本发明利用自然天体和人造天体,通过光电测量手段,实现在卫星无
线电拒止环境下的高精度全天时导航,有效解决无线电被干扰欺骗的难题,可作为无人飞行器等无人系统备用导航方法与装置。
[0038]
本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
[0039]
本发明上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:
[0040]
图1为根据本发明实施例的eci和ecef坐标系的示意图;
[0041]
图2为根据本发明实施例的星敏感器、太阳敏感器、红外光学敏感器视场与安装关系示意图;
[0042]
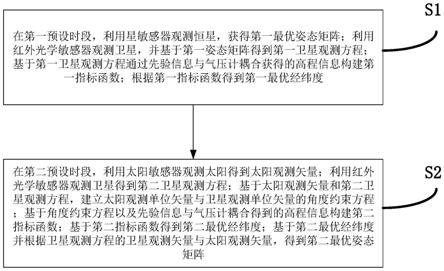
图3为根据本发明实施例的基于恒星与卫星联合的全天时光学导航方法的流程图;
[0043]
图4为根据本发明实施例的基于恒星与卫星的全天时导航框架示意图;
[0044]
图5为根据本发明实施例的星敏感器、太阳敏感器、红外光学敏感器成像示意图;
[0045]
图6为根据本发明实施例的夜间导航方式方法示意图;
[0046]
图7为根据本发明实施例的白天导航方式方法示意图;
[0047]
图8为根据本发明实施例的基于恒星与卫星联合的全天时光学导航装置的结构示意图。
具体实施方式
[0048]
需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
[0049]
为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
[0050]
下面参照附图描述根据本发明实施例提出的基于恒星与卫星联合的全天时光学导航方法及装置,首先将参照附图描述根据本发明实施例提出的基于恒星与卫星联合的全天时光学导航方法。
[0051]
应当理解的是,在具体阐述本发明实施例的基于恒星与卫星联合的全天时光学导航方法前,需要对本发明中提及的坐标系进行说明。如图1所示,eci表示天球赤道坐标系,又称地心赤道坐标系,以j2000.0坐标系为基准,即坐标系为公元2000年1月1日地球力学时12时建立的惯性坐标系,eci坐标系以地心为原点,x轴指向春分点,z轴指向北天极,y轴在赤道平面内且由右手定则确定;ecef表示地固坐标系,以地心为原点,x轴指向经纬度为零的点,z轴指向地北极,y轴在赤道平面内且由右手定则确定。enu表示地理坐标系,即东北天坐标系,以载体质心为原点,x轴指向东,y轴指向北,z轴垂直指向天。
[0052]
作为一种示例,如图2所示,全天时导航装置由20
°×
20
°
视场星敏感器、120
°×
120
°
视场太阳敏感器和40
°×
40
°
红外光学敏感器组成。星敏感器和太阳敏感器分别用来观测恒星和太阳,红外光学敏感器用来观测卫星。全天时导航分为夜间与白天两种情况,在夜间星敏感器与红外光学敏感器组合工作;在白天,太阳敏感器与红外光学敏感器组合工作。星敏感器的工作原理是根据所拍摄到的恒星图像,计算星点位置,并与已知星表进行比较进而获得星敏感器相对eci坐标系的姿态信息。太阳敏感器可获得太阳在敏感器内的矢量,进而计算太阳的方向角和高度角。携带红外光源的卫星一旦进入红外敏感器视场,导航设备可全天时观测卫星发光信号,获得卫星观测矢量,进而获得卫星ecef坐标。
[0053]
需要说明的是,全天时光学导航基于无限远恒星与有限距离卫星,实现姿态、地理位置的解耦。为了实现全天时对卫星的观测,人造卫星需搭载红外波段光源,卫星在ecef坐标系的精确位置由其精密星历提供。地面装置在已知utc时间的情况下,一旦观测到卫星,经过解码获得卫星编号后,通过精密星历即可在红外敏感器观测卫星时,实时获得卫星在ecef坐标系下的位置。
[0054]
作为一种示例,本发明需人造卫搭载红外光学信标,为了使星标光源能够透过大气且不被大气分子吸收,信标的中心谱段为1550nm,发散角至少为
±
10
°
。人造卫星轨道高度为400至600千米。卫星红外光源以一定频率进行闪烁,导航设备中的红外光学敏感器根据闪烁频率确定卫星编号,进而卫星精密星历的辅助下,开展全天时导航。
[0055]
本发明将分别对夜晚和白天两种情况进行具体阐述。其中,夜晚情况下的姿态可直接通过星敏感器获得,位置需星敏感器与红外光学敏感器联合求解;白天情况下的姿态和位置需通过多时刻太阳敏感器与红外光学敏感器联合求解。
[0056]
图3是本发明一个实施例的基于恒星与卫星联合的全天时光学导航方法的流程图。
[0057]
如图3所示,该基于恒星与卫星联合的全天时光学导航方法包括以下步骤:
[0058]
步骤s1,在第一预设时段,利用星敏感器观测恒星,获得第一最优姿态矩阵;利用红外光学敏感器观测卫星,并基于第一姿态矩阵得到第一卫星观测方程;基于第一卫星观测方程通过先验信息与气压计耦合获得的高程信息构建第一指标函数;根据第一指标函数得到第一最优经纬度。
[0059]
应当理解的是,本步骤是对在夜晚情况下进行阐述。
[0060]
首先,利用星敏感器观测恒星,获得第一最优姿态矩阵。
[0061]
具体的,如图4和图6所示,在夜晚,导航设备利用恒星与卫星进行导航,其中星敏感器观测恒星,红外光学敏感器观测卫星。
[0062]
具体地,夜晚存在大量可见光(400nm-780nm)波段的恒星,由于恒星到地球的距离无限远,因此利用星敏感器对其观测计算,可得到敏感器姿态信息,如图5所示,根据星敏感器的原理:
[0063][0064]
其中,p
eci|i
为恒星在eci坐标系下的矢量,p
st|i
为恒星在星敏感器坐标系下的矢量,表达式为:
[0065]
[0066]
其中,(x0,y0)为星敏感器的中点坐标,(xi,yi)为星点成像坐标,f
st
为星敏感器的焦距;
[0067]
通过对多个恒星成像,可以利用quest等方法,获得星敏感器坐标系到eci坐标系下的最优姿态矩阵
[0068]
接着,利用红外光学敏感器观测卫星,并基于第一姿态矩阵得到第一卫星观测方程。
[0069]
需要说明的是,低轨卫星(400km-1000km)具有一定高度的轨道,其绕地球一圈只需大约95分钟,观测卫星时,观测地点不同会导致观测卫星矢量不同。
[0070]
具体地,低轨卫星携带红外光源载荷,红外光学敏感器可实现对其观测,观测方程可表示为:
[0071][0072]
其中,s
eci
为卫星在eci下的有距离矢量,为最优状态矩阵,s
*
为卫星在红外光学敏感器的矢量,如图5所示,其计算方法与星敏感器计算星点坐标相似。k(t)为敏感器到卫星的距离,为系统在ecef坐标下的位置,(φ,λ,h)分别表示纬度、经度和高程,代表所需求解的经纬高信息。为ecef坐标系到eci坐标系的转换矩阵,为红外光学敏感器与星敏感器的安装矩阵。
[0073]
具体地,k(t)由以下公式求得:
[0074][0075]
作为一种示例,在wgs-84坐标系中,可表示为:
[0076][0077]
其中,e表示wgs-84坐标系定义的地球椭球面离心率,re(φ)表示地球卯酉圈曲率半径,计算公式分别如下:
[0078][0079][0080]
其中,r
p
表示地球椭圆长半轴,ro表示短半轴。
[0081]
可以知道的是,在系统运行前,需提前与标准utc时间较准,在系统工作时,依靠高精度晶振对系统进行授时。因此根据系统utc时间可获得根据系统安装关系,经过标定获得红外光学敏感器与星敏感器的安装矩阵s
eci
是卫星在eci坐标系下的矢量,其可以根据卫星在ecef坐标系内的经纬高(φs,λs,hs)和计算,如下所示:
[0082]
[0083]
进一步的,基于第一卫星观测方程通过先验信息与气压计耦合获得的高程信息构建第一指标函数。
[0084]
具体地,通过先验信息与气压计耦合的方式获得敏感器所处的高程信息h,进而构建如下指标函数:
[0085][0086]
进一步的,根据第一指标函数得到第一最优经纬度。
[0087]
具体地,通过非线性最小二乘方法,使下式达到最小值,此时可求出最优的经纬度(φ,λ):
[0088]
min‖g(φ,λ)‖2[0089]
步骤s2,在第二预设时段,利用太阳敏感器观测太阳得到太阳观测矢量;利用红外光学敏感器观测卫星得到第二卫星观测方程;基于太阳观测矢量和第二卫星观测方程,建立太阳观测单位矢量与卫星观测单位矢量的角度约束方程;基于角度约束方程以及先验信息与气压计耦合得到的高程信息构建第二指标函数;基于第二指标函数得到第二最优经纬度;基于第二最优经纬度并根据所述卫星观测方程的卫星观测矢量与所述太阳观测矢量,得到第二最优姿态矩阵。
[0090]
可以理解的是,该步骤是对白天情况下的阐述。
[0091]
在白天,由于大气背景辐射,恒星光会被大气反射光掩盖,唯一能够用来导航的恒星只有太阳,但仅有一个矢量的情况下不仅无法求出惯性系下的姿态,更无法求解地理位置。因此,如图4和图7所示,本发明的一个实施例引入有限距离卫星,利用卫星高速运动特性和红外光源的白天可观测性,连续观测卫星矢量,与太阳矢量建立位姿耦合方程,进行多帧迭代解耦,实现姿态与地理位置的解算。白天导航所用设备为太阳敏感器与红外光学敏感器,太阳敏感器观测太阳获得太阳矢量,红外光学敏感器观测卫星。计算具体步骤如下:
[0092]
首先,在第二预设时段,利用太阳敏感器观测太阳得到太阳观测矢量。第二预设时段为白天时段。
[0093]
可以理解地是,本发明的恒星、太阳与卫星观测矢量的表达式为:
[0094][0095]
其中,v
*
分别表示恒星观测矢量p
st
、太阳观测矢量r
*
与卫星观测矢量s
*
,(x0,y0)表示星敏感器、太阳敏感器与红外光学敏感器的中点坐标,(xi,yi)表示星点、太阳与卫星的成像坐标,f
dev
分别表示星敏感器的焦距f
st
、太阳敏感器的焦距f
sun
与红外光学敏感器的焦距f
ir
。
[0096]
具体地,如图5所示,太阳敏感器的成像原理与星敏感器相似,太阳观测单位矢量可表达为:
[0097]
[0098]
其中,(x0,y0)表示太阳敏感器的中点坐标,(xi,yi)表示太阳点的成像坐标,f
sun
表示太阳敏感器的焦距。
[0099]
在已知utc时间t的情况下,根据太阳星历,获得任意时间ecef坐标系内的太阳矢量r
ecef
,进而得到如下关系:
[0100][0101]
其中,表示太阳敏感器坐标系到ecef坐标系的姿态矩阵。
[0102]
进一步地,利用红外光学敏感器观测卫星得到第二卫星观测方程。
[0103]
可以知道的是,星敏感器在白天无法观测恒星,因此无法直接求出姿态关系。但白天,可以靠卫星上的红外光源载荷,通过红外光学敏感器观测卫星,得到卫星观测方程:
[0104][0105]
其中,s
ecef
表示卫星在ecef坐标系下的矢量,可由卫星的实时经纬高(φs,λs,hs)解算,s
*
表示卫星在红外光学敏感器的单位矢量,与恒星敏感器求解星点一致。k(t)表示观测点到卫星的距离。表示观测点在ecef坐标系中的矢量。其中,的计算方式同上,s
ecef
、ks(t)通过如下公式计算:
[0106][0107][0108]
进一步地,基于太阳观测矢量和第二卫星观测方程,建立太阳观测单位矢量与卫星观测单位矢量的角度约束方程。
[0109]
具体地,通过对太阳敏感器两个时刻太阳观测矢量与红外光学敏感器两个时刻的卫星观测矢量进行比较,可以得到如下关系:
[0110][0111]
太阳敏感器与红外敏感器测量得到的均为单位矢量,因此建立太阳观测单位矢量与卫星观测单位矢量的角度约束方程,可表示为:
[0112][0113]
系统敏感器安装矩阵提前均已标定。因此,在同一时刻对太阳和卫星的观测,可以获得其矢量夹角θ
t
。在已知敏感器相对精准的高程信息h后,还存在经纬度两个未知量。由于近地卫星运动速度快,在下一时刻,卫星与太阳的矢量夹角会发生改变。因此在两个时刻,有两个方程,进而可以求解出最优经纬度。
[0114]
进一步地,基于角度约束方程以及先验信息与气压计耦合得到的高程信息构建第二指标函数,并得到第二最优经纬度。
[0115]
具体地,在进行导航时,设备可能发生运动。为了弥补导航设备的地理位置变化,引入敏感器在enu坐标系下的初速度与加速度。进而建立如下方程。
[0116][0117][0118][0119]
其中,d
enu
(δx,δy,δz)表示在两个时刻内,敏感器在enu坐标系内的位置变化,通过载体的运动敏感器进行测量,表示观测点p点从enu坐标系到ecef坐标系的旋转矩阵,其值可表示为:
[0120][0121]
分别获得太阳单位矢量和卫星单位矢量夹角,以及两个时刻间的位移变化情况后,构建如下指标函数
[0122][0123]
可以通过非线性最小二乘方法,进行多次迭代,使下式达到最小值。
[0124]
min‖l(φ,λ)‖2[0125]
经过多次迭代,可以求解出白天情况下敏感器所处的经纬度信息。
[0126]
进一步地,基于第二最优经纬度并根据卫星观测方程的卫星观测矢量与太阳观测矢量,得到第二最优姿态矩阵。
[0127]
具体地,为了求解姿态矩阵以t1时刻为例,构建如下方程:
[0128][0129]
可以通过quest等方法,在已知观测点经纬高(φ,λ,h)的情况,根据卫星观测矢量与太阳观测矢量,可以求解出最优姿态矩阵
[0130]
通过上述步骤,通过光电测量手段,实现在卫星无线电拒止环境下的高精度全天时导航,有效解决无线电被干扰欺骗的难题,可作为无人飞行器等无人系统备用导航方法与装置。
[0131]
为了实现上述实施例,如图8所示,本实施例中还提供了一种基于恒星与卫星联合的全天时光学导航装置10,该装置10包括:第一预设时段模块100和第二预设时段模块200。
[0132]
第一预设时段模块100,用于在第一预设时段,利用星敏感器观测恒星,获得第一最优姿态矩阵;利用红外光学敏感器观测卫星,并基于第一姿态矩阵得到第一卫星观测方
程;基于第一卫星观测方程通过先验信息与气压计耦合获得的高程信息构建第一指标函数;根据第一指标函数得到第一最优经纬度;
[0133]
第二预设时段模块200,用于在第二预设时段,利用太阳敏感器观测太阳得到太阳观测矢量;利用红外光学敏感器观测卫星得到第二卫星观测方程;基于太阳观测矢量和第二卫星观测方程,建立太阳观测单位矢量与卫星观测单位矢量的角度约束方程;基于角度约束方程以及先验信息与气压计耦合得到的高程信息构建第二指标函数;基于第二指标函数得到第二最优经纬度;基于第二最优经纬度并根据卫星观测方程的卫星观测矢量与太阳观测矢量,得到第二最优姿态矩阵。
[0134]
根据本发明实施例的基于恒星与卫星联合的全天时光学导航装置,通过光电测量手段,实现在卫星无线电拒止环境下的高精度全天时导航,有效解决无线电被干扰欺骗的难题,可作为无人飞行器等无人系统备用导航方法与装置。
[0135]
需要说明的是,前述对基于恒星与卫星联合的全天时光学导航方法实施例的解释说明也适用于该实施例的基于恒星与卫星联合的全天时光学导航装置,此处不再赘述。
[0136]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
[0137]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0138]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1