一种具有空间线形重构功能的自适应高速磁浮道岔的制作方法
1.本发明属于磁浮道岔技术领域,具体涉及一种具有空间线形重构功能的自适应高速磁浮道岔。
背景技术:
2.磁浮交通系统是目前国际上地面交通体系中速度最快、技术最为先进的交通系统。它主要依靠电磁力来实现支承、导向、牵引和制动功能。与常规轮轨列车相比,具有低噪音、低能耗、无污染、安全舒适和高速高效的特点,被认为是一种具有广阔前景的新型交通工具。
3.道岔是磁浮列车系统中轨道结构系统的重要组成部分。磁浮道岔与铁路道岔相比有较大的区别,磁浮道岔实际上是一根连续可弹性弯曲的钢梁,由液压或电动机械驱动道岔钢梁从直股转换到侧股。
4.磁浮道岔过程中,转辙精度、可靠性由控制系统保证,在转辙过程中,控制系统无法精确感知整体转辙线形,动作行程可能会超过行程开关的允许值,造成行程开关损坏而无法复位的故障,极大影响系统的可靠性;弹性侧弯型高速磁浮道岔长度大,整体形变测量困难,目前采用多点布设倾角传感器,随着测量距离的增加,道岔整体线形重构累计误差增大,无法满足重构精度要求。因此,需要研究出一种能够有效地实时感知侧弯型高速磁浮道岔线形的技术。
技术实现要素:
5.针对现有技术的以上缺陷或改进需求中的一种或者多种,本发明提供了一种具有空间线形重构功能的自适应高速磁浮道岔,能够实时感知侧弯型高速磁浮道岔转辙线形。
6.为实现上述目的,按照本发明的一个方面,提供一种高速磁浮道岔空间线形自反馈系统,包括数据采集硬件系统、后台数据处理系统和道岔形变实时显示系统;
7.所述数据采集硬件系统包括设于道岔梁上的光纤光栅传感阵列、传导光纤和光纤光栅高速解调仪,用于采集光纤光栅安装位置的应变数据,并实时传输到后台数据处理系统;
8.所述后台数据处理系统根据数据采集硬件系统获取波长数据计算应变数据、计算位移场,再通过计算模型位置、修改模型位置最终刷新绘制模型,进一步传递给所述道岔形变实时显示系统,通过人机交互后将道岔模型线型进行可视化显示。
9.作为本发明的进一步改进,所述后台数据处理系统根据数据采集硬件系统获取波长数据计算应变数据、计算位移场,即空间线形重构方法,包括如下步骤:
10.s1通过光纤光栅传感阵列每个节点中心波长和波长变化量计算节点处的曲率及弯曲方向;
11.s2通过插值方法获取测量节点间数据;
12.s3在每个节点建立绝对坐标系和运动坐标系,通过递推关系计算出变换矩阵,从
而计算出后一点在绝对坐标系中的坐标,不断重复该过程,即可获得空间曲线上所有离散点的坐标信息,最终重构出该空间曲线。
13.作为本发明的进一步改进,步骤s1中,光纤光栅传感阵列包括光纤光栅a、光纤光栅b和光纤光栅c,存在三者的纤芯距离相等的几何中心,距离为d;
14.光纤光栅传感阵列实际应变包括由结构弯曲产生的纯机械应变和由温度变化引起的诱导应变,因此同一节点处三个光纤光栅的实际应变为:
[0015][0016]
令λa、λb、λc分别为三个节点光纤光栅传感阵列的中心波长、δλa、δλb、δλc分别为三个节点中心波长变化量,则可由光纤光栅传感阵列的中心波长计算出同一节点处三个光纤光栅的计算应变分别为:
[0017][0018]
令所述计算应变等于实际应变,计算出每个节点的曲率和弯曲方向为:
[0019][0020]
εa、εb、εc分别三个fbg的实际应变,k为节点处的曲率,θ表示弯曲方向与光纤光栅a的夹角,α、ξ分别为热膨胀系数和热光系数,为常数。
[0021]
作为本发明的进一步改进,步骤s2中,采用hermite插值,设[a,b]上有n个插值节点,则hermite表达式为:
[0022][0023]
其中,yi、hi和ai可由下式计算得到:
[0024]
yi=y(xi),yi=y(xi)
[0025][0026][0027]
作为本发明的进一步改进,步骤s3中,包括如下过程:
[0028]
在空间曲线o1o2o3的一端建立全局绝对坐标系x-y-z,在每个节点建立运动坐标系,其中ai沿着几何中心指向光纤光栅a的方向,ci沿着空间曲线在此点的切线方向,bi垂直于ai、ci组成的平面,组成右手笛卡尔坐标系;计算出每个计算节点在前一个运动坐标系下的运动坐标mi;假设全局绝对坐标系为f,存在齐次变换矩阵ti将f转换到第i点处的运动坐标系,转换关系如下式:
[0029]
mi=t
if[0030]
两边同时乘以可得:
[0031]
f=t
i-1
mi[0032]
每一点的运动坐标系m
i+1
可通过前一点的运动坐标系mi经过一个齐次变换矩阵t
i+1
转换得到:
[0033]mi+1
=t
i+1
mi[0034]
齐次变换矩阵可根据运动坐标系mi依次绕ci、b
i-1
、c
i-2
旋转特点角度θi、-θ
i+1
,再平移向量pi,变换矩阵分别为:
[0035][0036][0037]
[0038][0039]
则齐次变换矩阵可求得:
[0040]
t
i+1
=pr3r2r1[0041]
经过计算最终可得所述运动坐标系与所述全局绝对坐标系的变换矩阵 ti为一个递推关系式如下:
[0042]
t
i+1
=t
i+1
ti[0043]
经过递推可求得每一点处的转换矩阵t
i+1
和运动坐标mi,继而转换到绝对坐标系中,获得每一点的绝对坐标;重复此步骤,即可获得所有离散点的空间坐标,从而重构出磁浮道岔的空间线形。
[0044]
作为本发明的进一步改进,所述道岔梁包括上顶板和下底板;
[0045]
所述上顶板和下底板之间设有腹板,所述腹板之间通过隔板固定,并且腹板外部两侧固定有筋板,两侧的筋板顶面分别设有滑撬板,底面分别设有π形板,并且所述π形板和滑撬板通过穿过筋板的竖板固定;
[0046]
在高速磁浮道岔梁两侧π形板和滑撬板之间的竖板上设有第一光纤光栅传感阵列和/或第二光纤光栅传感阵列,和/或所述上顶板下方设有第三光纤光栅传感阵列,能够通过光纤光传感阵列网络实时重构道岔线形。
[0047]
作为本发明的进一步改进,光纤光栅网络阵列根据道岔结构特点和光纤光栅参数特性布设。假设光纤光栅传感器(s1,s2,
…
,sn)组成的传感器网对监测点有效重构系数为:
[0048][0049]
其中,为监测点曲率,ω为道岔梁不同区域权重系数,α为衰减系数,和传感器与监测点矢径;
[0050]
认定当f≥γ时,能够有效重构道岔梁线形,其中γ为监测阈值,故可得到光纤光栅传感器有效监测距离ds为:
[0051][0052]
作为本发明的进一步改进,磁浮道岔梁侧弯时为直线-回旋曲线-圆曲线
ꢀ‑
回旋曲线-直线的拟合弯曲曲线,其中直线区段监测区段中,光纤光栅传感阵列均匀布设;回旋曲线区段中,光纤光栅传感阵列两端布设距离小于中间布设距离;圆曲线区段上光纤光栅传感阵列布设距离逐渐减小。
[0053]
作为本发明的进一步改进,各纤光栅传感阵列外部设有保护结构,所述保护结构包括负膨胀系数的钙钛矿材料层、第一铬钢管和第二铬钢管,其中钙钛矿材料层与纤光栅传感阵列直接接触,用于温度补偿;所述第一铬钢管和第二铬钢管分别用于传递应力和保护器件。
[0054]
总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
[0055]
(1)本发明的高速磁浮道岔空间线形自反馈系统,采用光纤光栅传感阵列位移测量技术,在高速磁浮道岔上连续布设光纤光栅阵列传感器,实时感知侧弯型高速磁浮道岔转辙线形。本发明能够实时感知磁浮列车直向通过道岔、侧向通过道岔时道岔梁体形变和磁浮列车和道岔梁的耦合共振应力,通过精确感知数据制定对策,调整锁销横向约束及走行轨竖向约束状态,防止道岔梁体破坏;同时,感知系统能够通过道岔线型多工况、长时间运行数据,对道岔线型进行优化。
[0056]
(2)本发明的高速磁浮道岔空间线形自反馈系统,根据道岔梁最终弯曲线形的曲率、监测区段权重系数、传感器监测衰减系数和监测阈值确定,优化光纤光栅传感网络节点布设;并且设计了一种管式光纤光栅保护装置,对光纤光栅阵列进行封装,极大增强传感器使用寿命和可靠性。
[0057]
(3)本发明的高速磁浮道岔空间线形自反馈系统,解决光纤光栅测量温度补偿问题,采用多传感器数据融合方法,消除模型重构累计误差和数据跳变误差。
[0058]
(4)本发明的高速磁浮道岔梁的线形自反馈系统,后台数据处理系统根据数据采集硬件系统采集的应变测量数据计算节点位移形变,通过模型结构变形的位移重构,利用图形可视化技术实时显示道岔结构的变形,同步模拟现实磁浮道岔整个转辙,定位、对齐过程。
附图说明
[0059]
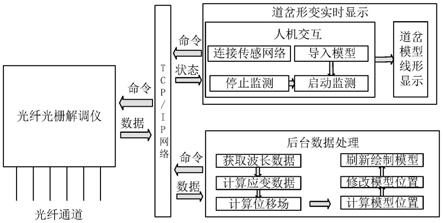
图1为本发明实施例的磁浮道岔线形自反馈实时显示系统示意图;
[0060]
图2为本发明实施例的磁浮道岔线形自反馈硬件系统示意图;
[0061]
图3为本发明实施例的具有空间自反馈功能的高速磁浮道岔整体结构示意图;
[0062]
图4为本发明实施例的具有空间自反馈功能的高速磁浮道岔梁结构示意图;
[0063]
图5为本发明实施例的具有空间自反馈功能的高速磁浮道岔梁光纤光栅传感阵列安装位置示意图;
[0064]
图6为本发明实施例的具有空间自反馈功能的高速磁浮道岔梁直线和弯曲状态对比图;
[0065]
图7为本发明实施例的具有空间自反馈功能的高速磁浮道岔梁监测点布置距离示意图;
[0066]
图8为本发明实施例的具有空间自反馈功能的高速磁浮道岔梁涉及的光纤光栅保护结构示意图;
[0067]
图9为本发明实施例的三光纤光栅分布计算示意图;
[0068]
图10为本发明实施例的坐标系转换及递推示意图。
[0069]
在所有附图中,同样的附图标记表示相同的技术特征,具体为:1-道岔梁、2-活动端垛梁、3-固定支撑、4-道岔基础、5-台车、6-驱动系统、7-锁闭系统、8-光纤光栅传感器、9-筋板、10-第一光纤光栅传感阵列、11-连接板、12-第二光纤光栅传感阵列、13-上顶板、14-滑撬板、15-第三光纤光栅传感阵列、16-π形板、17-腹板、18-下底板、19-隔板、20-光纤光栅传感阵列、21-钙钛矿材料层、22-第一铬钢管、23-第二铬钢管。
具体实施方式
[0070]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0071]
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0072]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
[0073]
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0074]
在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
[0075]
如图1和图2所示,本发明的高速磁浮道岔空间线形自反馈系统,包括数据采集硬件系统、后台数据处理系统和道岔形变实时显示系统。数据采集硬件系统包括光纤光栅传感阵列、传导光纤和光纤光栅高速解调仪,用于采集fbg安装位置的应变数据,并实时传输到后台数据处理系统,后台数据处理系统根据数据采集硬件系统获取波长数据、计算应变数据、计算位移场(对应线形重构方法中的曲率计算、引入曲率插值和曲线坐标点的递推),再通过计算模型位置、修改模型位置最终刷新绘制模型,进一步传递给道岔形变实时显示系统,通过人机交互将道岔模型线型进行可视化显示。
[0076]
如图3所示,高速磁浮道岔结构包括道岔梁1和活动端垛梁2,道岔梁 1下方设有若干间隔布置的转辙机构,用于将道岔梁1和活动端垛梁2对接;转辙机构包括道岔基础4以及设置在其上方的固定支撑3、台车5、驱动系统6、锁闭系统7。驱动系统的主要作用是电机驱动梁的横移,锁闭装置的主要作用是锁闭电机驱动电动推杆插入地面固定朵桩孔内,同时通过走行轨限位机构,实现道岔梁结构三维约束,使主梁在相应位置上稳定不动,保证车辆通行的稳定性。道岔梁1上设有若干光纤光栅传感器8,本发明道岔梁结构为整体弹性侧弯型结构,道岔通过转辙机构进行整体侧弯实现直向、侧向位的转辙。道岔梁嵌入光纤光栅阵列传感光缆,在道岔弯曲过程中可实时检测道岔线形,可实现道岔梁结构形变实时监测、道
岔对齐自动检测及列车过岔时的动态共振实时监测等。
[0077]
本发明的具有空间线形重构功能的自适应高速磁浮道岔梁,包括上顶板13和下底板18,上顶板13和下底板18之间设有腹板17,腹板17之间通过横向隔板19固定,并且腹板17外部两侧固定有筋板9,两侧的筋板9 顶面分别设有连接板11和滑撬板14,底面分别设有π形板16,并且π形板16和滑撬板14通过穿过筋板9的竖板固定。
[0078]
根据道岔梁结构特点与转辙时道岔整体线形变化,在道岔全段布设若干光纤光栅传感器,本发明对于光纤光栅传感器的数量不作具体限制,只要能够达到上述监测效果即可。在本发明图4所述的一个优选实施例中,道岔梁上布置为三光纤光栅传感器的具体形式;第一光纤光栅传感阵列10 和第二光纤光栅传感阵列12分别设于两侧π形板16和滑撬板14之间的竖板上,紧贴筋板9安装;第三光纤光栅传感阵列15设于上顶板13下方,在隔板19上预先开设有光纤光栅传感阵列安装槽。
[0079]
另外需要说明的是,光纤光栅传感网络优选安装于两端滑撬板与π形板中间以及上顶板下方,除此之外,还可以安装于如图5所示的下底板18 中部、两侧腹板17中部或者π形板16中部上方。
[0080]
进一步如图6所示,通过光纤光栅传感网络对道岔梁进行线形自反馈时,将监测点的应变信息转换为曲率信息,通过曲率信息与弧长信息拟合道岔梁整体线形,故保证曲率信息连续性是道岔梁线形自反馈高精度监测的前提。通过综合考虑光纤光栅解调仪解调范围、fbg工作范围、高速磁浮道岔梁结构形变特点,优化光纤光栅传感网络节点布设,可以减少传感器数量与信息冗余,提高测量精度。
[0081]
为评价传感器对道岔应变监测与形变重构准确率,假设传感器 (s1,s2,
…
,sn)组成的传感器网对监测点有效重构系数为:
[0082][0083]
其中,为监测点曲率,ω为道岔梁不同区域权重系数,α为衰减系数,和传感器与监测点矢径。
[0084]
认定当f≥γ时,能够有效重构道岔梁线形,其中γ为监测阈值,故可得到传感器有效监测距离ds为:
[0085][0086]
故本发明传感器布设的距离根据道岔梁最终弯曲线形的曲率、监测区段权重系数、传感器监测衰减系数和监测阈值确定。
[0087]
结合图6和图7,道岔在侧弯时近似为直线-回旋曲线-圆曲线-回旋曲线
ꢀ‑
直线的拟合弯曲曲线,根据道岔弯曲结构特点,设置相应的传感器布设方式。在道岔转辙过程中,直线区段(l1)较为固定,传感器均匀布设即可满足监测需求;在道岔转辙过程中,回旋曲线区段(l2)的线形变化为中间曲率最小,两端曲率较大,故传感器两端布设距离较小,中间传感器布设距离较大。圆曲线区段道(l3)是道岔转辙变形的监测重点,且道岔梁形变曲率逐渐变大,故传感器布设距离逐渐变小。
[0088]
另外,为保证光纤光栅传感器可靠性,如图8所示,光纤光栅外部设有保护结构,对光纤光栅阵列进行封装,保护结构包括负膨胀系数的钙钛矿材料层21、第一铬钢管22和第二铬钢管23,其中钙钛矿材料层21与纤光栅传感器直接接触,包覆于传感器的外部,用于温度补偿;第一铬钢管 22设于钙钛矿材料层21一侧,用于传递应力,第二铬钢管套于钙钛矿材料层21和第一铬钢管22外部,用于保护器件。温度发生变化时,负膨胀系数的钙钛矿材料层21和第一铬钢管22的变化量此消彼长,互相抵消,使两者之间没有力的相互作用,能够实现温度补偿和应变增敏,外部第二铬钢管23能够在高速磁浮预埋空间保护内部传感器,极大增强传感器使用寿命和可靠性。
[0089]
空间曲线重构算法目的是将fbg获得的离散中心波长信息转化为磁浮道岔的形状信息或者坐标信息,从而重构出磁浮道岔的空间线形。基于光纤光栅的磁浮道岔应变监测和线形拟合对三维重构算法要求很高,需要较高的精度和实时性,同时针对高速磁浮复杂的工作环境,必须考虑光纤光栅的温度补偿问题。
[0090]
本发明的重构方法主要包含三个步骤:曲率计算、引入曲率插值和曲线坐标点的递推,对应数据采集硬件系统中后台数据处理系统根据数据采集硬件系统获取波长数据、计算应变数据、计算位移场。
[0091]
首先是通过fbg每个节点中心波长和波长变化量计算节点处的曲率及弯曲方向,其次通过插值方法获取测量节点间数据,最后在每个节点建立运动坐标系,通过递推关系计算出变换矩阵,从而计算出后一点在绝对坐标系中的坐标,不断重复该过程,即可获得空间曲线上所有离散点的坐标信息,最终重构出该空间曲线。
[0092]
以本发明三光纤光栅传感阵列的具体实施方式为例,具体重构方法如下:
[0093]
步骤一:曲率计算
[0094]
如图7和图8,本发明一个具体实施例的三光纤光栅布设中,存在三个光纤光栅a、b、c的纤芯距离相等的几何中心,距离为d,考虑到光纤光栅的交叉敏感特性,每个测量节点处fbg的实际应变包括由结构弯曲产生的纯机械应变和由温度变化引起的诱导应变两部分,因此同一节点处三个 fbg的实际应变为:
[0095][0096]
其中,εa、εb、εc分别三个fbg的实际应变,k为节点处的曲率,θ表示弯曲方向与光纤光栅a的夹角,α、ξ分别为热膨胀系数和热光系数,为常数。
[0097]
令λa、λb、λc分别为三个节点fbg的中心波长、δλa、δλb、δλc分别为三个节点中心波长变化量,则可由fbg的中心波长计算出应变,此时忽略fbg 的温度敏感特性,认为中心波长的变化全部由应变引起,则计算出的应变实质上已经包含了温度因素。同一节点处三个光纤光栅的计算应变分别为:
[0098][0099]
其中,pe为弹光系数。令计算应变等于实际应变,既εa=ε'a,εb=ε'b,εc=ε'c,可计算出每个节点的曲率和弯曲方向:
[0100][0101]
步骤二:曲率插值
[0102]
由于光纤光栅测量节点数目是有限,为了减小重构误差,光滑地重构出曲线的形状,采用hermite插值。设[a,b]上有n个插值节点,则hermite表达式为:
[0103][0104]
其中,yi、hi和ai可由下式计算得到:
[0105]
yi=y(xi),yi′
=y
′
(xi)
[0106][0107][0108]
另外,本发明除了采用上述hermite插值,还可以采用线性插值或者多项式插值,本领域技术人员可以根据实际情况进行选择。
[0109]
步骤三:曲线坐标点递推
[0110]
在空间曲线o1o2o3的一端建立全局绝对坐标系x
–
y-z,在每个节点建立运动坐标系,其中ai沿着几何中心指向光纤光栅a的方向,ci沿着空间曲线在此点的切线方向,bi垂直于ai、ci组成的平面,组成右手笛卡尔坐标系。步骤二中插值点足够多时,两点之间圆弧段极
其微小且不考虑扭曲状态时,该微小圆弧段可看作是密切平面上的曲线,从而计算出每个计算节点在前一个运动坐标系下的运动坐标mi。假设全局绝对坐标系为f,存在齐次变换矩阵ti将f转换到第i点处的运动坐标系,转换关系如下式:
[0111]
mi=t
if[0112]
两边同时乘以可得:
[0113]
f=t
i-1
mi[0114]
每一点的运动坐标系m
i+1
可通过前一点的运动坐标系mi经过一个齐次变换矩阵t
i+1
转换得到:
[0115]mi+1
=t
i+1
mi[0116]
齐次变换矩阵可根据运动坐标系mi依次绕ci、b
i-1
、c
i-2
旋转特点角度θi、-θ
i+1
,再平移向量pi,变换矩阵分别为:
[0117][0118][0119][0120][0121]
则齐次变换矩阵可求得:
[0122]
t
i+1
=pr3r2r1[0123]
经过计算最终可得运动坐标系与全局坐标系的变换矩阵ti为一个递推关系式如下:
[0124]
t
i+1
=t
i+1
ti[0125]
经过递推可求得每一点处的转换矩阵t
i+1
和运动坐标mi,继而转换到绝对坐标系中,获得每一点的绝对坐标。重复此步骤,即可获得所有离散点的空间坐标,从而重构出磁浮道岔的空间线形。
[0126]
另外需要说明的是,上述光纤光栅传感阵列的重构方法是根据本发明优选实施例中的三光纤光栅设置形式,设置其他光纤光栅数量时,采用相同的思路进行计算即可。
[0127]
道岔线形重构算法会极大影响重构精度,传感器测量数据出现跳变、缺失时,重构线形会出现极大累计偏差。本发明的基于多光纤光栅传感阵列的磁浮道岔线形重构方法,解决光纤光栅测量温度补偿问题,采用多传感器数据融合方法,消除模型重构累计误差和数据跳变误差。
[0128]
本发明的空间线形自反馈系统,后台数据处理系统采用上文所述的重构方法,根据应变测量数据计算节点位移形变,通过模型结构变形的位移重构,利用图形可视化技术实时显示道岔结构的变形,同步模拟现实磁浮道岔整个转辙,定位、对齐过程。
[0129]
本发明的高速磁浮道岔梁的线形自反馈系统,能够实时感知磁浮列车直向通过道岔、侧向通过道岔时道岔梁体形变和磁浮列车和道岔梁的耦合共振应力,通过精确感知数据制定对策,调整锁销横向约束及走行轨竖向约束状态,防止道岔梁体破坏;同时,感知系统能够通过道岔线型多工况、长时间运行数据,对道岔线型进行优化。
[0130]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1