环形器件中各层厚度的量测方法及装置与流程
本技术涉及半导体检测技术,尤其涉及一种环形器件中各层厚度的量测方法及装置。
背景技术:
1、半导体芯片(例如目前主流的3d-dram芯片)中广泛存在着圆柱形的电容器件。圆柱形电容器件由金属层和介电质层间隔分布组成,在半导体芯片的加工生产过程中,需要根据圆柱形电容器件的截面图形获知圆柱形电容器件中各层的厚度数据,以控制圆柱形电容器件的各层厚度符合半导体芯片的制造要求。
2、在传统方法中,一般是人工截取圆柱形电容器件的环形截面,再人工测量电容器件环形截面中各层的厚度数据,这种方法测量得到的数据不仅会因为人工测量主观因素过多而存在不准确的问题,还会因为测量时间过长而导致半导体芯片制造速度降低。
3、因此,如何提高圆柱形电容器件中各层的厚度数据测量的准确度,提高厚度数据测量的速度,仍然是亟待解决的问题。
技术实现思路
1、本技术提供一种环形器件中各层厚度的量测方法及装置,用以提高圆柱形电容器件中各层的厚度数据测量的准确度,提高厚度数据测量的速度。
2、根据一些实施例,本技术第一方面提供一种环形器件中各层厚度的量测方法,包括:
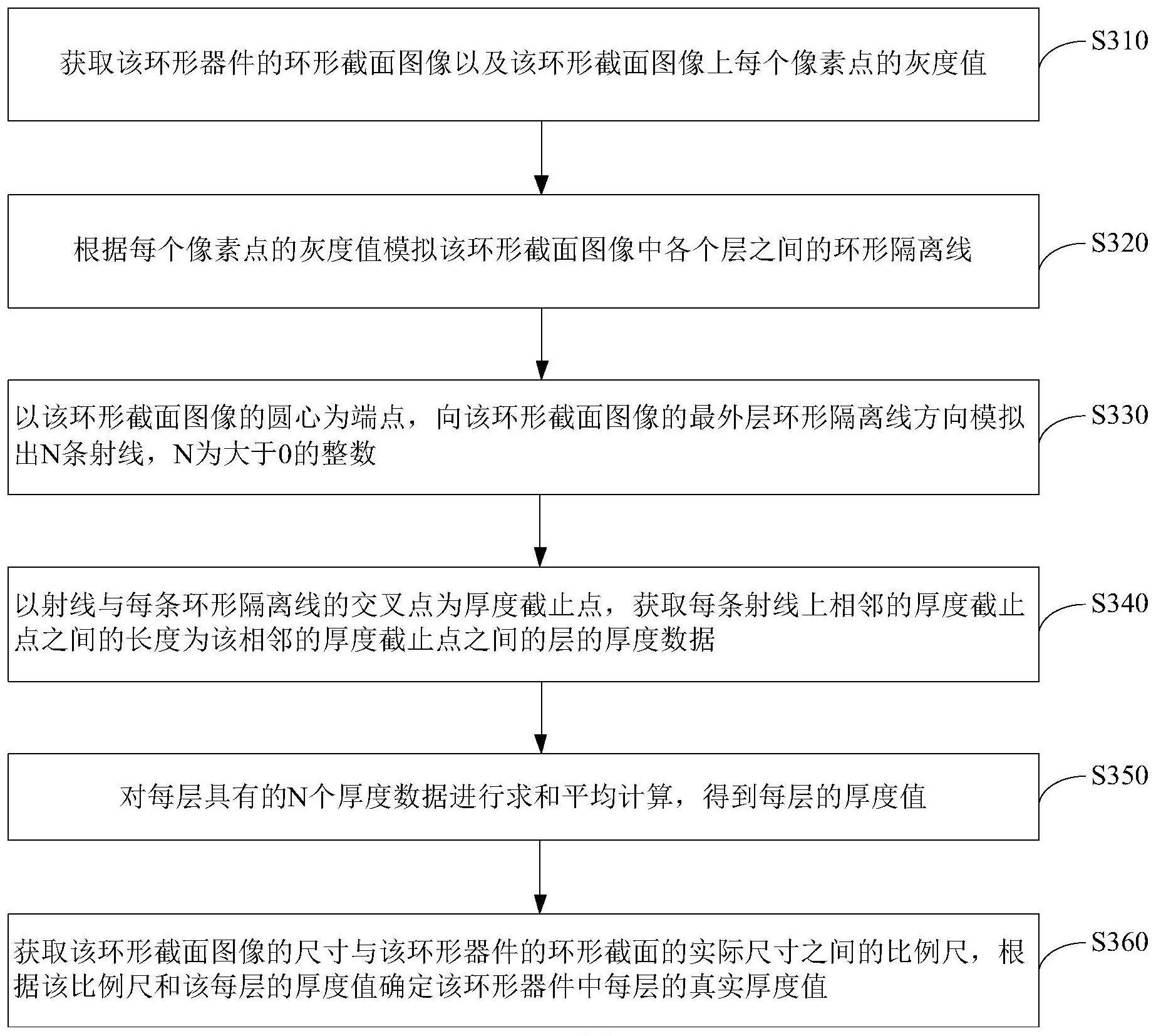
3、获取所述环形器件的环形截面图像以及所述环形截面图像上每个像素点的灰度值;
4、根据每个像素点的灰度值模拟所述环形截面图像中各个层之间的环形隔离线;
5、以所述环形截面图像的圆心为端点,向所述环形截面图像的最外层环形隔离线方向模拟出n条射线,n为大于0的整数;
6、以射线与每条环形隔离线的交叉点为厚度截止点,获取每条射线上相邻的厚度截止点之间的长度为所述相邻的厚度截止点之间的层的厚度数据;
7、对每层具有的n个厚度数据进行求和平均计算,得到每层的厚度值;
8、获取所述环形截面图像的尺寸与所述环形器件的环形截面的实际尺寸之间的比例尺,根据所述比例尺和所述每层的厚度值确定所述环形器件中每层的真实厚度值。
9、可选的,所述根据每个像素点的灰度值模拟所述环形截面图像中各个层之间的环形隔离线,包括:
10、筛选出所述环形截面图像中灰度值大小为至少前百分之十的像素点为目标像素点;
11、检测所述环形截面图像中的各像素对,每个像素对由一个第一目标像素点以及与所述第一目标像素点相邻且距离最短的一个第二目标像素点组成;
12、通过线段连接各像素对中第一目标像素点和第二目标像素点,得到所述环形截面图像中各个层之间的环形隔离线。
13、可选的,还包括:
14、分别沿第一方向和第二方向将所述环形截面图像按照长度l等间隔划分,得到m个子图像区域,所述第一方向和所述第二方向为相互垂直的两个方向,l大于零,m为大于零的整数;
15、所述通过线段连接各像素对中第一目标像素点和第二目标像素点,得到所述环形截面图像中各个层之间的环形隔离线包括:
16、只有当像素对中的第一目标像素点和第二目标像素点在同一个子图像区域时,通过线段连接第一像素对中第一目标像素点和第二目标像素点,得到所述环形截面图像中各个层之间的环形隔离线。
17、可选的,还包括:
18、以所述环形截面图像的圆心为原点,沿所述第一方向和所述第二方向将所述环形截面图像划分为四个象限,其中,第一象限的横纵坐标值大于0,第二象限的横坐标值小于0且纵坐标值大于0,第三象限的横纵坐标值均小于0,第四象限的横坐标值大于0且纵坐标值小于0;
19、所述通过线段连接第一像素对中第一目标像素点和第二目标像素点,得到所述环形截面图像中各个层之间的环形隔离线包括:
20、获取每个象限中的第一像素对,所述第一像素对中的第一目标像素点横坐标值小于第二目标像素点的横坐标值;
21、通过线段连接所述第一象限和所述第三象限的第一像素对中第一目标像素点和第二目标像素点后,当第一目标像素点的纵坐标值小于第二目标像素点的纵坐标值时,抹除第一像素对中第一目标像素点和第二目标像素点之间的线段;
22、通过线段连接所述第二象限和所述第四象限的所述第一像素对中第一目标像素点和第二目标像素点后,当第一目标像素点的纵坐标值大于第二目标像素点的纵坐标值时(y1>y2),抹除第一像素对中第一目标像素点和第二目标像素点之间的线段;
23、根据剩余未抹除的线段得到所述环形截面图像中各个层之间的环形隔离线。
24、可选的,所述通过线段连接第一像素对中第一目标像素点和第二目标像素点,得到所述环形截面图像中各个层之间的环形隔离线包括:
25、当线段的长度大于或等于时,抹除所述线段;
26、根据剩余未抹除的线段得到所述环形截面图像中各个层之间的环形隔离线。
27、可选的,所述以射线与每条环形隔离线的交叉点为厚度截止点,获取每条射线上相邻的厚度截止点之间的长度为所述相邻的厚度截止点之间的层的厚度数据包括:
28、读取每个厚度截止点的坐标数据;
29、根据每个厚度截止点的坐标数据确定每条射线上相邻的厚度截止点之间的长度为所述相邻的厚度截止点之间的层的厚度数据。
30、可选的,所述对每层具有的n个厚度数据进行求和平均计算,得到每层的厚度值包括:
31、剔除每层具有的n个厚度数据中的最大值和最小值,对剩余的厚度数据进行求和平均计算,得到每层的厚度值。
32、根据一些实施例,本技术第二方面提供一种环形器件中各层厚度的量测装置,包括:
33、获取模块,用于获取所述环形器件的环形截面图像以及所述环形截面图像上每个像素点的灰度值;
34、模拟模块,用于根据每个像素点的灰度值模拟所述环形截面图像中各个层之间的环形隔离线;
35、所述模拟模块还用于以所述环形截面图像的圆心为端点,向所述环形截面图像的最外层环形隔离线方向模拟出n条射线,n为大于零的整数;
36、处理模块,用于以射线与每条环形隔离线的交叉点为厚度截止点,获取每条射线上相邻的厚度截止点之间的长度为所述相邻的厚度截止点之间的层的厚度数据;
37、所述处理模块还用于对每层具有的n个厚度数据进行求和平均计算,得到每层的厚度值;
38、所述处理模块还用于获取所述环形截面图像的尺寸与所述环形器件的环形截面的实际尺寸之间的比例尺,根据所述比例尺和所述每层的厚度值确定所述环形器件中每层的真实厚度值。
39、可选的,所述模拟模块具体用于:
40、筛选出所述环形截面图像中灰度值大小为至少前百分之十的像素点为目标像素点;
41、检测所述环形截面图像中的各像素对,每个像素对由一个第一目标像素点以及与所述第一目标像素点相邻且距离最短的一个第二目标像素点组成;
42、通过线段连接各像素对中第一目标像素点和第二目标像素点,得到所述环形截面图像中各个层之间的环形隔离线。
43、可选的,还包括:
44、图像划分模块,用于分别沿第一方向和第二方向将所述环形截面图像按照长度l等间隔划分,得到m个子图像区域,所述第一方向和所述第二方向为相互垂直的两个方向,l大于零,m为大于零的整数;
45、所述模拟模块具体用于:
46、只有当像素对中的第一目标像素点和第二目标像素点在同一个子图像区域时,通过线段连接第一像素对中第一目标像素点和第二目标像素点,得到所述环形截面图像中各个层之间的环形隔离线。
47、可选的,所述图像划分模块还用于:
48、以所述环形截面图像的圆心为原点,沿所述第一方向和所述第二方向将所述环形截面图像划分为四个象限,其中,第一象限的横纵坐标值大于0,第二象限的横坐标值小于0且纵坐标值大于0,第三象限的横纵坐标值均小于0,第四象限的横坐标值大于0且纵坐标值小于0;
49、所述模拟模块具体用于:
50、获取每个象限中的第一像素对,所述第一像素对中的第一目标像素点横坐标值小于第二目标像素点的横坐标值;
51、通过线段连接所述第一象限和所述第三象限的第一像素对中第一目标像素点和第二目标像素点后,当第一目标像素点的纵坐标值小于第二目标像素点的纵坐标值时,抹除第一像素对中第一目标像素点和第二目标像素点之间的线段;
52、通过线段连接所述第二象限和所述第四象限的所述第一像素对中第一目标像素点和第二目标像素点后,当第一目标像素点的纵坐标值大于第二目标像素点的纵坐标值时(y1>y2),抹除第一像素对中第一目标像素点和第二目标像素点之间的线段;
53、根据剩余未抹除的线段得到所述环形截面图像中各个层之间的环形隔离线。
54、可选的,所述模拟模块具体用于:
55、当线段的长度大于或等于时,抹除所述线段;
56、根据剩余未抹除的线段得到所述环形截面图像中各个层之间的环形隔离线。
57、根据一些实施例,本技术第三方面提供一种电子设备,包括:处理器,以及与所述处理器通信连接的存储器;
58、所述存储器存储计算机执行指令;
59、所述处理器执行所述存储器存储的计算机执行指令,以实现如第一方面所述的环形器件中各层厚度的量测方法。
60、根据一些实施例,本技术第四方面提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,当所述指令被执行时,使得计算机执行如第一方面所述的环形器件中各层厚度的量测方法。
61、根据一些实施例,本技术第五方面提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如第一方面所述的环形器件中各层厚度的量测方法。
62、本技术的一些实施例提供的环形器件中各层厚度的量测方法根据环形器件的环形截面图像和该环形截面图像上每个像素点的灰度值模拟出该环形截面图像中各个层之间的环形隔离线。再以该环形截面图像的圆心为端点,模拟出至少一条射线,以射线与每条环形隔离线的交叉点为厚度截止点,获取射线上相邻的厚度截止点之间的长度为该相邻的厚度截止点之间的层的厚度数据。再根据所述环形截面图像的尺寸与所述环形器件的环形截面的实际尺寸之间的比例尺确定出该环形器件中每层的真实厚度值。本实施例提供的方法无需人工参与进行环形器件中每层厚度的量测,只需要模拟出环形隔离线、射线,以及经过其他处理就可以得到该环形器件中每层的厚度值,提高了环形器件(圆柱形电容器件)中各层的厚度数据测量的准确度,提高了厚度数据测量的速度。
- 还没有人留言评论。精彩留言会获得点赞!