用于ADAS校准的对准的制作方法
用于adas校准的对准
1.相关申请的引用
2.该申请涉及于2017年7月14日提交的美国临时专利申请no.62/532,712以及于2018年7月16日提交的美国专利申请no.16/036,527,其名称均为“高精度、高准确度单轮毂激光扫描仪”,以上申请中的每个申请的公开内容通过引用并入本文。
背景技术:
3.许多车辆具有充当结构基础的框架。作为结构基础,车辆框架可以支撑各种车辆部件,比如发动机、车身和动力传动系。车辆框架可以由诸如钢之类的金属形成并且通常被设计成承受大量的应力。然而,一些框架还被设计成具有故意的褶皱区以帮助保护乘客。褶皱区可操作以在碰撞期间变形来吸收一部分冲击。此外,存在多种可用的车辆框架,其具有不同的形状、尺寸、部件等。
4.许多车辆还具有高级驾驶员辅助系统,比如车道偏离警告(lgw)系统、防抱死制动系统(abs)、自适应巡航控制(acc)、前向碰撞警告(fcw)以及依赖于各种传感器——比如红外、紫外和可见光相机、lidar、radar、gps以及超声波传感器等中的一种或多种——的其他系统。
5.在某些情况下,比如在碰撞的情况下,车辆的框架可能会从其预期形状变形。车辆框架的变形可能会产生不利后果,比如车辆部件错位、车辆部件磨损增加或结构完整性降低。有时,当车辆框架变形时,它可能会弯曲回其预期形状。然而,可能难以确定变形的车辆框架是否正确地弯曲回其预期形状。类似地,adas传感器会因为传感器需要周期性的重新校准而随时间发生变化,但车辆的变形会影响重新校准系统成功运行的能力。
6.尽管已经制造并使用了各种框架测量和adas校准系统、方法及相关联部件,但相信在本发明人之前没有人制造或使用所附权利要求中描述的发明。
附图说明
7.尽管说明书以特别指出并明确要求保护该技术的权利要求书结尾,但相信从以下结合附图对某些示例的描述中将更好地理解该技术,其中相同的附图标记表示相同的元件,在附图中:
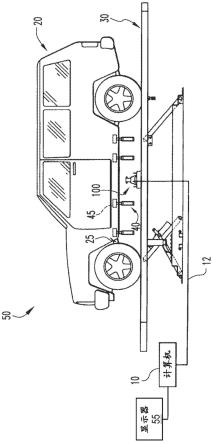
8.图1是车辆的侧视图,其具有从车辆上的预定位置悬挂的编码反射目标并且具有位于车辆下方并沿着用于扫描编码反射目标的取向的扫描组件;
9.图2a是图1的扫描组件的立体图,其中回转组件处于第一旋转位置;
10.图2b是图1的扫描组件的立体图,其中图2a的回转组件旋转至第二旋转位置;
11.图3是图1的扫描组件的分解侧视图;
12.图4是图2a的回转组件的分解立体图;
13.图5a是图2a的回转组件处于第一旋转位置的立体图,其中,为了清楚起见,移除了壳体;
14.图5b是图2a的回转组件处于第二旋转位置的立体图,其中,为了清楚起见,移除了
壳体;
15.图6是图2a的回转组件的驱动组件的立体图;
16.图7是图2a的回转组件的飞轮组件的立体图;
17.图8是图7的飞轮组件的另一立体图,其中,为了清楚而移除了选定部件;
18.图9是图7的飞轮组件沿图8的线9-9截取的横截面俯视图,该飞轮组件具有启用的激光器组件;
19.图10a是图7的飞轮组件旋转至第一位置时沿图8的线9-9截取的横截面俯视图,在该第一位置,图9的激光器组件被启用而没有从图1的编码反射目标反射出的外向光束;
20.图10b是图7的飞轮组件旋转至第二位置时沿图8的线9-9截取的横截面俯视图,在该第二位置,图9的激光器组件被启用且具有从图1的编码反射目标反射出的第一外向光束;
21.图10c是图7的飞轮组件旋转至第三位置时沿图8的线9-9截取的横截面俯视图,在该第三位置,图9的激光器组件被启用且具有从图1的编码反射目标反射出的第二外向光束;
22.图11是图7的飞轮组件的分解立体图,其中,为了清楚起见,移除了选定部件;
23.图12是图7的飞轮组件的立体图,其中,为了清楚起见,移除了选定部件;
24.图13是图7的飞轮组件的俯视平面图,其中,为了清楚起见,移除了选定部件;
25.图14是图7的飞轮组件的旋转位移测量组件的编码器组件的立体图;
26.图15是图7的飞轮组件沿图8的线15-15截取的横截面平面图;
27.图16a是图7的飞轮组件沿图8的线15-15截取的并且在图15的圆16内的横截面平面图,其中,飞轮组件处于第一旋转位置;
28.图16b是图7的飞轮组件沿图8的线15-15截取的并且在图15的圆16内的横截面平面图,其中,飞轮组件处于第二旋转位置;
29.图16c是图7的飞轮组件沿图8的线15-15截取的并且在图15的圆16内的横截面平面图,其中,飞轮组件处于第三旋转位置;
30.图17是图7的飞轮组件的光学块组件的立体图;
31.图18是图17的光学块组件的另一立体图;
32.图19是图17的光学块组件的俯视平面图;
33.图20是图17的光学块组件的分解立体图;
34.图21是图17的光学块组件的另一分解立体图;
35.图22是图17的光学块组件沿图18的线22-22截取的横截面立体图;
36.图23是图17的光学块组件的横截面俯视图,其中,激光已经从图1的编码反射目标反射出并且反射回到光学块组件中,如图10c中所示;
37.图24是图17的光学块组件的单件块的立体图;
38.图25是图24的单件块的另一立体图;
39.图26是图24的单件块的仰视平面图;
40.图27是图24的单件块沿图24的线27-27截取的横截面立体图;
41.图28是用于图30的示例性目标检测系统的状态机的流程图;
42.图29a和图29b是由图30的示例性目标检测系统处理的目标回波的波形;
43.图30是与图2a的扫描组件一起使用的目标检测系统的示意图;
44.图31是与图2a的扫描组件一起使用的adas校准系统的示意图;以及
45.图32是在所描述的系统中使用的处理装置的示意图。
46.附图不旨在以任何方式进行限制,并且预期本技术的各种实施方式可以以各种其他方式实现,包括那些未必在附图中描绘的方式。纳入本说明书并构成本说明书的一部分的附图图示了本技术的多个方面,并且附图与描述一起解释了本技术的原理;但是,应当理解的是,本技术不限于所示的精确布置。
具体实施方式
47.以下对本技术某些示例的描述不应当用来限制本技术的范围。本技术的其他示例、特征、方面、实施方式和优势将通过以下描述而对本领域技术人员而言变得明显,该描述通过举例说明的方式展现出预期实施本技术的最佳模式之一。如将认识到的,在此描述的技术在不背离本技术的情况下能够具有其他不同的和明显的方面。因此,附图和描述应当被认为是说明性的,而不是限制性的。
48.i.示例性测量系统的概述
49.图1示出了示例性测量系统50。在图1中示出测量系统50处于包括提升车辆20的车辆升降组件30的示例性环境中。车辆20包括框架组件25。
50.测量系统50包括扫描组件100、计算机10以及经由框架附接特征件45附接至框架组件25的选定点位的多个编码反射目标40。扫描组件100的合适部件与计算机10经由线缆12连通。框架附接特征件45构造成附接至框架组件25上的选定点位,使得编码反射目标40相对于扫描组件100适当地定向。可以使用任何合适类型的框架附接特征件45和编码反射目标40,鉴于本文的教导,这对本领域普通技术人员而言将是明显的。
51.扫描组件100定位成与编码反射目标40竖向对准。尽管在当前示例中,扫描组件100通过车辆升降组件30进行支撑,但是扫描组件100也可以通过任何其他合适的机构进行支撑,鉴于本文的教导,这对本领域普通技术人员而言将是明显的。例如,扫描组件100可以搁置在其自身的可调节支撑桌面上。
52.如下文将更详细描述的,扫描组件100被配置成在发射光、比如激光的同时旋转,使得光从编码反射目标40反射并朝着扫描组件100返回。扫描组件100被配置成当来自目标40的反射光被朝着扫描组件100引导回时进行检测。因此,扫描组件100可以位于在扫描组件100与所有编码反射目标40之间没有视觉障碍的位置。
53.扫描组件100可以将任何合适的信息发送到计算机10以便计算机10可以在扫描组件100检测到来自目标40的反射光时确定扫描组件100的旋转位置或旋转位移。通过应用几何原理,计算机10可以使用该信息来确定编码反射目标40在三维空间中相对于扫描组件100和彼此位于何处。替代性地,扫描组件100本身可以包含确定每个编码反射目标40的位置所需的处理资源,然后扫描组件100可以将该数据发送到计算设备或将其显示在用户显示器55上。
54.图2a至图3示出了示例性扫描组件100。扫描组件100包括基部组件110、顶部组件130以及回转组件200。如在图2a至2b间所见,回转组件200的选定部分构造成相对于基部组件110和顶部组件130的冠部132绕纵向轴线la旋转。尽管如本领域技术人员将理解的,旋转
速度会发生改变,但是回转组件200仍可以以尽可能接近恒定的旋转速度绕纵向轴线la旋转。
55.基部组件110包括本体112、从本体112延伸的手柄114、电源开关120、电源端口122以及通信端口124。如在图3中最佳所见,基部组件110的本体112限定开口116,该开口116构造成容纳回转组件200的部分并与之联接。手柄114构造成使操作者能够抓持扫描组件100并将其放置在期望的位置。电源开关120能够操作以启用扫描组件100进行操作,如上所述,并且这也将在下文中更详细地描述。因此,电源开关120可以启用扫描组件100,从而使回转组件200旋转、使光从回转组件200发射、对来自目标40的反射光进行检测并追踪回转组件200的旋转位置和/或旋转位移。电源开关120还可以启用扫描组件100的需要电力的任何其他功能。替代性地或附加地,电源开关120的启用使监控/控制系统通电,操作者可以通过该监控/控制系统单独启用回转组件200、激光器272、测量电子设备以及鉴于该公开内容本领域技术人员将想到的其他部件。
56.电源端口122构造成与电源连接以对扫描组件100进行充电或启用。扫描组件100可以容纳有电池,使得当电源端口122连接至电源时,电池开始充电。电池可以被配置成即便在扫描组件100未直接连接至电源时为扫描组件100的所有电力需求供电。在其他实施方式中,扫描组件100不包含电池,使得扫描组件100仅可以在电源端口122连接至电源时进行操作。
57.通信端口124构造成与通信线缆12联接以在计算机10与扫描组件100之间建立通信。尽管在当前示例中,通信端口124和通信线缆12提供计算机10与扫描组件100之间的通信,但是可以在扫描组件100与计算机10之间使用任何其他合适形式的通信,鉴于本文的教导,这对本领域普通技术人员而言将是明显的。例如,通信端口124可以替代性地或附加地包括无线接口,该无线接口构造成提供扫描组件100与计算机10之间的无线通信,从而有效地消除对通信线缆12的需求。替代性地,扫描组件100可以有能力经由无线通信和有线通信两者与计算机10进行通信,从而给操作者机会选择使用何种方法。
58.如在图4中最佳所见,回转组件200包括驱动组件210、飞轮组件220以及壳体202。壳体202限定第一孔204和第二孔206。壳体202固定至飞轮组件220的顶部并覆盖飞轮组件220的顶部,使得第一孔204和第二孔206与光学块组件300对准。如将在下文中更详细地描述的,光学块组件300构造成使光能够穿过光学块组件300,使得扫描组件100可以朝向目标40发射光,并且使得扫描组件100可以接收并检测来自目标40的反射光。第一孔204和第二孔206与光学块组件300对准以使光能够穿出和进入光学块组件300的选定部分以及壳体202。
59.如在图6中最佳所见,驱动组件210包括向上延伸到竖向轴214中的圆柱形基部212、以可旋转的方式联接至圆柱形基部212和/或竖向轴214的滑环216以及从滑环组件216径向向外延伸的联接臂218。在竖向轴214与顶部组件130的冠部132联接的同时,圆柱形基部212与基部组件110联接。圆柱形基部212和竖向轴214与基部组件110机械地固接(grounded),使得无论是圆柱形基部212还是竖向轴214都无法相对于基部组件110旋转。当扫描组件100被启用时,滑环组件216构造成绕由竖向轴214限定的纵向轴线la旋转。如在图5a至5b中最佳所见,联接臂218连接至滑环组件216,使得飞轮组件230绕纵向轴线la的旋转使联接臂218绕纵向轴线la旋转。滑环组件216构造成从旋转电路板222来回发送电力和通
信信号到位于本体112中的固定电路板。
60.如图7中最佳所见,飞轮组件220包括经由多个连接柱226固定至飞轮基部230的旋转电路板222。飞轮组件220限定中心开口225,该中心开口225构造成接纳驱动组件210的一部分。驱动组件210还包括安装至旋转电路板222的马达223。马达皮带轮221安装至马达轴的端部。马达皮带轮221通过皮带与固定皮带轮227连接,使得当马达223使马达皮带轮221旋转时,飞轮基部230绕纵向轴线la旋转。尽管在当前示例中马达223连接至旋转电路板222,但是马达223可以与扫描组件100的任何其他合适部分联接,鉴于本文的教导,这对于本领域普通技术人员而言将是明显的。此外,可以使用任何其他合适的部件来旋转驱动飞轮组件220,鉴于本文的教导,这对于本领域的普通技术人员而言将是明显的。
61.另外,飞轮组件220包括与飞轮基部230固定的旋转轴环228。旋转轴环228与驱动组件210的圆柱形基部212以可旋转的方式联接,使得旋转轴环228可以在保持被圆柱形基部212竖向支撑的同时绕纵向轴线la旋转。因为飞轮基部230被固定至旋转轴环228,所以飞轮基部230也与圆柱形基部212以可旋转的方式联接。旋转轴环228可以通过任何合适的手段与圆柱形基部212联接,鉴于本文的教导,这对本领域普通技术人员而言将是明显的。例如,多个球轴承可以以可旋转的方式联接旋转轴环228与圆柱形基部212。
62.图8和图11示出了飞轮组件220,为了清楚起见,省略了旋转电路板222。如上所述,飞轮组件220包括能够绕纵向轴线la旋转的飞轮基部230。飞轮基部230的顶部附接有激光器组件270、两个五棱镜组件240、两个光学块组件300以及温度传感器280。因此,随着飞轮基部230如上所述地绕纵向轴线la旋转,激光器组件270、五棱镜组件240、光学块组件300和温度传感器280也绕纵向轴线la旋转。
63.激光器组件270包括经由激光器支架274固定至飞轮基部230的激光器272。每个五棱镜组件240包括经由棱镜支架244固定至飞轮基部230的五棱镜242、242
′
。如可以在图9中看到的,激光器272有效地邻近分束器五棱镜242并且从第二五棱镜242
′
侧向移位。当激光器272启用时,激光器272发射第一外向光束290,该第一外向光束290穿过分束器五棱镜242并穿过第一光学块组件300。分束器五棱镜242将激光分成指向第二五棱镜242
′
的分光束291。然后第二五棱镜242
′
将分光束291引导成第二外向光束292,该第二外向光束292穿过第二光学块组件300行进。第一外向光束290和第二外向光束292穿过壳体202的第一孔204和第二孔206离开回转组件200。因此,激光器组件270和五棱镜组件240一起产生了两个外向光束390、392,这两个外向光束390、392大致彼此平行并且间隔开两个五棱镜242、242
′
之间的已知距离。由于激光器272、五棱镜242、242
′
和光学块组件300均固定至飞轮基部230,所以随着飞轮基部230绕纵向轴线la旋转,第一输出光束390和第二输出光束392也绕纵向轴线la旋转。
64.在当前示例中使用了五棱镜242、242
′
。然而,可以使用任何其他合适的分束装置,鉴于本文的教导,这对本领域普通技术人员而言将是明显的。例如,可以采用具有菱形(rhombus)、长菱形(rhomboid)或平行四边形的横截面形状的棱镜,例如,如在美国专利no.8,381,409中所述的那样。
65.图10a至图10c示出了如上所述的扫描组件100利用激光器组件270、五棱镜组件240和光学块组件300的示例性使用。扫描组件100如上所述地适当定位,使得扫描组件100与目标40竖向对准。目标40经由框架附接特征件45附接至车辆20的框架25,使得目标40相
对于扫描组件100适当地定向。尽管在图10a至图10c中示出了一个目标40,但是应当理解的是,可以有效地将多个目标40定向并定位在车辆框架25的预定位置上。
66.图10a示出了一旦扫描组件100通过电源开关120启用而处于初始旋转位置的飞轮组件220。因此,激光器272被启用,使得五棱镜组件240产生第一外向光束390和第二外向光束392,如上所述。此外,飞轮组件220开始绕纵向轴线la旋转,使得外向光束390、392也与飞轮组件220统一绕纵向轴线la旋转。如上所述,并且如将在下文中更详细地描述的,扫描组件100能够操作以在飞轮组件220绕纵向轴线la旋转时追踪飞轮组件220的旋转位移和/或旋转位置,并且将该旋转位移和/或旋转位置发送到计算机10。
67.图10b示出了旋转成使得第一外向光束390从目标40反射的飞轮组件220。因此,目标40使第一反射光束394朝向飞轮组件220、朝向第一外向光束390所穿过的光学块组件300反射回。如将在下文中更详细地描述的,光学块组件300构造成将第一反射光束394进一步反射成第二反射光束396和定向光束398。如将在下文中更详细地描述的,光学块组件300包括构造成检测定向光束398的光检测器370。光检测器370还与计算机10进行通信。一旦与第一外向光束390相关联的第一光学块组件300的光检测器370检测到定向光束398,则光检测器370将此检测传送至计算机10,然后该计算机10存储第一对应时间数据、飞轮组件220绕纵向轴线la的旋转位移和/或旋转位置。
68.接着,如图10c中所示,飞轮组件220进一步旋转成使得第二外向光束392从目标40反射回第二外向光束392所穿过的光学块组件300。如将在下文中更详细地描述的,该光学块组件300构造成将第一反射光束394进一步反射成第二反射光束396和定向光束398。如将在下文中更详细地描述的,光学块组件300包括构造成检测定向光束398的光检测器370。一旦与第二外向光束392相关联的第二光学块组件300的光检测器370检测到定向光束398,则光检测器370将此检测传送至计算机10,然后该计算机10存储第二对应时间数据、飞轮组件220绕纵向轴线la的旋转位移和/或旋转位置。然后计算机10可以利用输出光束390、392之间的已知距离和飞轮组件220在相应的光学块组件300检测到定向光束398时的角位置来计算目标40相对于扫描组件100的距离和角位置。
69.扫描组件100可以为适当地定位在框架25上的每个目标40都重复该过程,使得计算机10绘制出所有目标40的检测位置。扫描组件100可以如上所述迭代地扫描目标40,以便在操作者将框架弯曲成期望形状的同时追踪目标40的位置的改变。计算机10可以将目标40的实际位置和与特定框架25型号的合适形状相关联的每个目标40的预定位置进行比较。因此,测量系统50可以帮助确保操作者将框架25正确地修改成其期望的形状。
70.计算机10可以包括处理器和编码有可执行以实施本文所述的各种算法的编程信息的存储器,以及表示各种车辆的框架25上的各点的原始位置和/或最佳位置的数据。因此,应当理解的是,测量系统50可以在多种框架型号上实施。
71.ii.示例性旋转位移测量组件
72.在扫描组件100被启用的同时,可能发生会导致目标40的位置计算不准确的错误。如上所述,飞轮组件220的角位置被计算机10用来计算并绘制经检测目标40的位置。在某些现有系统中,飞轮组件220的角位移在目标被检测时基于飞轮组件220通过驱动组件210以恒定角速度进行旋转的假设来计算。在这种实施方式中,计算机10将使用飞轮组件220在与第一外向光束390相关联的第一光学块组件300检测到定向光束398的时刻和在与第二外向
光束392相关联的第二光学块组件300检测到定向光束398的时刻的角位移、利用假设的恒定角速度来计算目标40的位置。然而,由于各种因素,驱动组件210可能无法使飞轮组件220以恒定的角速度一致地旋转。因此,在计算飞轮组件220在那些时刻中的某一时刻或两个时刻下的精确角位置时可能发生错误,这会将错误引入计算机10的计算中和计算机10对目标40的位置的绘制中。
73.图11至图16c示出了示例性旋转位移测量组件250,该旋转位移测量组件250可以用于更加准确地测量绕纵向轴线la旋转的飞轮基部230的旋转位移和/或旋转位置。旋转位移测量组件250包括静态轮252、代码轮254和编码器组件260,代码轮254具有多个径向延伸的代码标记256,这些代码标记256围绕代码轮254的表面环形定位。代码轮254固定至静态轮252的下侧。飞轮基部230限定具有键接部分234的键孔凹部232。代码轮254和静态轮252容纳在键孔凹部232内。静态轮252和代码轮254相对于驱动组件210的圆柱形基部212在旋转上固定,使得静态轮252和代码轮254在马达223被启用时无法绕纵向轴线la旋转,如上所述。每个单独的代码标记256在围绕代码轮254的规则的旋转位置处径向呈现。代码轮254可以具有任何合适数量的代码标记256,鉴于本文的教导,这对本领域普通技术人员而言是明显的。代码标记256可以围绕代码轮254的底面平均地分布,以周向地包围代码轮254的底面,但是这仅仅是可选的。例如,代码轮254可以具有围绕代码轮254呈环形阵列的3000个代码标记256。
74.编码器组件260容纳在飞轮基部230的键接部分234内。编码器组件260包括电路板262、限定孔265的光学编码器264、通信端口266以及安装孔268。编码器组件260经由安装构件269和安装孔268固定至飞轮基部230,使得当马达组件216启用时,编码器组件260围绕纵向轴线la旋转,如上所述。编码器组件260在一个位置处固定至飞轮基部230,使得编码器组件260直接与代码标记256相邻。特别地,光学编码器264和孔265直接与代码标记256相邻。编码器组件260也定位成使得光学编码器254和孔265直接与代码标记256相邻,而与飞轮基部230的旋转位置无关。换言之,当编码器组件260围绕纵向轴线la旋转时,光学编码器254能够在孔265直接位于代码标记256下方时检测代码标记256并将代码标记256的顺序转换成电信号和/或二进制信号,这将在下文中更详细地讨论。因此,当代码标记256直接穿越过孔265时,光学编码器254可以检测代码标记256并使用相邻代码标记256的检测之间的时间来提高准确度,以此测量目标40的精确位置。由于光学编码器264固定至飞轮基部230,这也可以指示飞轮基部230的旋转位置和/或旋转位移。因此,当光学编码器264如图16a至图16b所示围绕纵向轴线la在相邻代码标记256之间旋转时,光学编码器264可以读取指示飞轮基部230已经旋转过已知角位移的信号。
75.光学编码器264经由电路板262与通信端口266通信。通信端口266可以通过本领域普通技术人员鉴于本文的教导已知的任何合适的手段连接至计算机10,比如有线或无线数据通信。因此,光学编码器264可以在其检测到相应的定向光束398的时刻基于通过光学编码器264对代码轮254的代码标记256进行读取而与计算机10关于飞轮基部230的旋转位置进行通信。
76.计算机10可以利用从光学编码器264输出的信号作为锁相环的输入来确定光学编码器264的读数之间的旋转位移,如图16c所示。例如,计算机10可以测量在飞轮基部230的先前旋转上光学编码器264对直接相邻的代码标记256的读数之间的时间。计算机10可以通
过在光学编码器264上读取每个相邻代码标记256所花费的时间来计算飞轮基部230的平均旋转速度。因此,如果光学块组件300在光学编码器264对代码标记256的读数之间检测到定向光束398,则计算机10可以利用锁相环的输出(在代码标记256之间)内插飞轮基部230的子间隔角位移。
77.尽管在当前示例中,旋转位移测量组件250利用代码轮254和光学编码器264来测量飞轮基部230的位移,但是其他实施方式可以使用本领域的普通技术人员鉴于本文的教导会想到的任何其他合适的角度测量技术。此外,虽然光学编码器264相对于飞轮基部230固定并且代码轮254相对于静态轮252固定,但这仅仅是可选的。例如,光学编码器264可以固定到静态轮252并且代码轮254可以固定到飞轮基部230。
78.iii.示例性反射光束多级检测
79.在一些操作场景中,当光检测器370开始接收到与目标40的反射相关联的定向光束398时,测量系统50无法知道与目标40的反射相关联的定向光束398的那部分的总体幅度将会是多少。即使在特定的安装中,扫描组件100与框架组件25之间的距离从一个车辆到下一个车辆的变化以及附接至特定框架组件25的目标40之间成比例的显著差异也会对信号幅度产生显著的差异。
80.对该技术问题的一种解决方案在图30中示出。由光检测器370中的一个光检测器输出的模拟反射信号401被分离并发送到多个(这里为六个)比较器411、412、413、414、415、416,每个比较器具有不同的阈值。在所示实施方式中,每个阈值是前一个阈值的两倍(例如,100mv、200mv、400mv、800mv、1600mv和3200mv),但是在其他实施方式中比例将不同,如本领域的技术人员鉴于本公开将想到的。
81.每个比较器411、412、413、414、415、416产生对应的二进制比较器输出421、422、423、424、425、426,其指示模拟反射信号401是否超过或不超过该比较器411、412、413、414、415、416的阈值。现场可编程门阵列(fpga)420接收二进制比较器输出421、422、423、424、425、426和定时信号429,从而实现图28所示的状态机430以产生时间输出431、433,如下文所讨论的。鉴于本公开,本领域技术人员将想到状态机430的替代性实施方式,比如在分立元件中、在一个或多个可编程控制器中或在功能等效的模拟电路中。
82.状态机430开始于基本状态s0。在比较器411的比较器输出421的前沿p1l,fpga 420将当前时间戳保存到寄存器420a中并移至状态s1.1。如果下一个接收到的转换信号是比较器412的比较器输出422的前沿p2l,则fpga 420将当前时间戳保存到寄存器420b中并且移至状态s2.2。或者,如果下一个接收到的转换信号是比较器411的比较器输出421的后沿,则fpga 420返回基本状态s0。
83.在该图示的实施方式中,自状态s2.2,如果下一个接收到的转换信号是比较器413的比较器输出423的前沿p3l,则fpga 420将当前时间戳保存到寄存器420c并移至状态s3.3。或者,如果下一个接收到的转换信号是比较器412的比较器输出422的后沿,则fpga 420移至状态s1.2。自状态s1.2,如果下一个接收到的转换信号是比较器413的比较器输出423的另一个前沿p3l,则fpga 420返回状态s2.2。另一方面,如果在状态s1.2中,fpga 420接收到比较器411的比较器输出421的后沿p1t,则fpga 420将当前时间保存到寄存器420t,经由输出431、433输出寄存器420a、420t的内容,并返回基本状态s0。
84.自状态s3.3,如果fpga 420接收到的下一个转换是比较器414的比较器输出424的
前沿p4l,则fpga 420将当前时间戳保存到寄存器420d并移至状态s4.4。另一方面,如果fpga 420接收到比较器413的比较器输出423的后沿p3t,则fpga 420移至状态s2.3。自状态s2.3,如果fpga 420接收到的下一个转换是比较器413的比较器输出423的另一个前沿,则fpga 420移回状态s3.3。另一方面,如果从状态s2.3,fpga 420接收到比较器412的比较器输出422的后沿p2t,则fpga 420将当前时间保存到寄存器420t中,经由输出431、433输出寄存器420b、420t的内容,并移至状态s1.3。自状态s1.3,如果模拟反射信号401继续下降,那么接收到的下一个转换是比较器411的比较器输出421的后沿,则fpga 420简单地返回到基本状态s0。另一方面,如果fpga 420处于状态s1.3并接收到比较器412的比较器输出422的另一个前沿p2l,则fpga 420再次将当前时间戳保存到寄存器420b并移至状态s2.2。
85.自状态s4.4,如果fpga 420接收到的下一个转换是比较器415的比较器输出425的前沿p5l,则fpga 420将当前时间戳保存到寄存器420e并移至状态s5.5。另一方面,如果fpga 420处于状态s4.4并且接收到比较器414的比较器输出424的后沿p4t,则fpga 420移至状态s3.4。自状态s3.4,如果fpga 420接收到的下一个转换是比较器414的比较器输出424的另一个前沿,则fpga 420移回状态s4.4。另一方面,如果自状态s3.4,fpga 420接收到比较器413的比较器输出423的后沿p3t,则fpga 420将当前时间保存到寄存器420t中,经由输出431、433输出寄存器420c、420t的内容,并移至状态s2.4。自状态s2.4,如果模拟反射信号401继续下降,那么接收到的下一个转换是比较器412的比较器输出422的后沿,则fpga 420简单地移至状态s1.3。另一方面,如果fpga 420处于状态s2.4并接收到比较器413的比较器输出423的另一个前沿p3l,则fpga 420再次将当前时间戳保存到寄存器420c并移至状态s3.3。
86.自状态s5.5,如果fpga 420接收到的下一个转换是比较器416的比较器输出426的前沿,则fpga 420移至状态s6.6。另一方面,如果fpga 420处于状态s5.5并且接收到比较器415的比较器输出425的后沿p5t,则fpga 420移至状态s4.5。从状态s4.5,如果fpga 420接收到的下一个转换是比较器415的比较器输出425的另一个前沿,则fpga 420移回状态s5.5。另一方面,如果从状态s4.5,fpga 420接收到比较器414的比较器输出424的后沿p4t,则fpga 420将当前时间保存到寄存器420t中,经由输出431、433输出寄存器420d、420t的内容,并移至状态s3.5。从状态s3.5,如果模拟反射信号401继续下降,那么接收到的下一个转换是比较器413的比较器输出423的后沿,则fpga 420移至状态s2.4。另一方面,如果fpga 420处于状态s3.5并接收到比较器414的比较器输出424的另一个前沿p4l,则fpga 420再次将当前时间戳保存到寄存器420d并移至状态s4.4。
87.从状态s6.6,fpga 420接收的下一个转换必定是比较器416的比较器输出426的后沿,并且在接收到它时,fpga 420移至状态s5.6。如果随后接收到比较器416的比较器输出426的另一个前沿,则fpga 420移回状态s6.6。另一方面,如果fpga 420处于状态s5.6并接收到比较器415的比较器输出425的后沿,则fpga 420将当前时间保存到寄存器420t中,经由输出431、433输出寄存器420e、420t的内容,并移至状态s4.6。从状态s4.6,如果模拟反射信号401继续下降,那么接收到的下一个转换是比较器414的比较器输出424的后沿,则fpga 420移至状态s3.5。另一方面,如果fpga 420处于状态s4.6并接收到比较器415的比较器输出425的另一个前沿p5l,则fpga 420再次将当前时间戳保存到寄存器420e并移至状态s5.5。
88.如本领域普通技术人员将理解的那样,以上所述及图28所示的逻辑避免产生仅由模拟反射信号401在任何单个比较器411、412、413、414、415、416的检测阈值附近的振荡所触发的输出。尽管在一些实施方式中该结果可能是合乎需要的,但是其他实施方式将使用不同的逻辑来实现不同的定性结果,如本领域技术人员鉴于本公开将想到的。
89.如本领域技术人员也将理解的,图28至图30中所示的检测子系统检测在宽信号幅度范围上对应于来自目标40的反射的模拟反射信号401中的峰值定时(当扫描组件100与各种目标40之间的距离变化很大时会发现)。图29a、图29b提供了不同幅度的示例波形并且示出了对应于那些峰值的上升沿和下降沿的检测点的阈值。当然,其他实施方式将具有不同数量的比较器、不同的比较器阈值和比较器阈值的分布、不同的状态逻辑、不同的输入/输出范例以及不同的数据存储技术,如本领域技术人员鉴于本公开将想到的。
90.iv.示例性光学块组件
91.如上所述,激光器组件270和五棱镜组件240附接至飞轮基部230以产生两个输出光束390、392。每个输出光束390、392被配置成延伸穿过相应的光学块组件300并从目标40反射回它们各自的光学块组件300以进行检测。如将在下文中更详细地描述的,光学块组件300可以进一步反射来自目标40的光束以将光束引导至光检测器370。因此,光学块组件300的部件必须相对于飞轮基部230且相对于光学块组件300的其他部件精确组装,以正确接收输出光束390以及反射光束394。当光学块组件300的部件相对于彼此未对准地组装时,可能会出现大量的测量误差。
92.图17至图23示出了解决该风险的示例性光学块组件300。光学块组件300包括整体块310、保护玻璃片360、反射镜362、光检测器370、螺纹保持环380、凸透镜382以及滤光片384。整体块310构造成附接至飞轮基部230,而所有其他部件构造成附接至整体块310。整体块310由单个材料块制成,使得它不需要组装。因此,当其他部件附接至整体块310时,其他部件将相对于彼此一致地放置就位。
93.如在图24至图27中最佳所见,整体块310包括基部312、保护玻璃延伸部314、反射镜延伸部316以及透镜组件外壳318。基部312限定两个安装孔322、324和销钉杆孔326。安装孔322定尺寸成用以接收安装螺钉323,而销钉杆孔324定尺寸成用以接收精密销钉杆325以便将整体块310固定至飞轮基部330。销钉杆325和销钉杆孔326可以确保整体块310相对于飞轮基部330精确定位和定向,而安装孔322、324和安装螺钉323可以确保整体块310固定至飞轮基部330并正确定向。
94.保护玻璃延伸部314构造成用以接收保护玻璃360并与保护玻璃360联接。保护玻璃360可以帮助保护光学块组件300的位于整体块310范围内的部件。保护玻璃延伸部314限定了凹部330和孔332。凹部330构造成与保护玻璃360过盈配合。尽管在当前示例中,保护玻璃360通过过盈配合与保护玻璃延伸部314配合,但是可以使用任何其他合适的连接保护玻璃360与保护玻璃延伸部314的手段,如本领域普通技术人员鉴于本文的教导将明了的。例如,可以使用卡扣配合或粘合剂。如图23中最佳所见,孔332构造成用以接收第一外向光束390(或类似地,第二外向光束392)并用以接收来自目标40的第一反射光束394。因为保护玻璃延伸部314是整体块310的部件,所以保护玻璃360可以相对于光学块组件300的其他部件一致地附接。
95.反射镜延伸部316构造成用以接收反射镜362并与反射镜362联接。反射镜延伸部
316包括可以包围并容纳反射镜362的凸缘315、317。反射镜延伸部316还限定了孔334。当安装时,销钉杆325可以延伸穿过销钉孔326以使反射镜362抵靠凸缘317,以便将反射镜362固定在反射镜延伸部316内。反射镜362限定了孔364。如图23中最佳所见,反射镜362和反射镜延伸部316定位成使得孔334、364可以接收第一外向光束390或第二外向光束392并且使得反射镜的内部部分可以将第一反射光束394反射成第二反射光束396。第二反射光束396被导向透镜382。因为反射镜延伸部316是整体块310的部件,所以反射镜362可以相对于光学块组件300的其他部件一致地附接。
96.透镜组件外壳318包括安装面320。安装面320限定了配置成用以接收安装螺钉374的联接孔338。安装面320可以通过联接孔338、378和安装螺钉374与光检测器370联接。透镜组件外壳318限定孔336,使得正确组装的光检测器370可以检测来自由透镜组件外壳318限定的第二光路352内的光。因为透镜组件外壳318是整体块310的部件,所以光检测器370可以相对于光学块组件300的其他部件以一致的位置和取向附接。
97.光检测器370包括通信端口372,该通信端口372被配置成提供光检测器370与计算机10之间的通信。光检测器370能够操作成用以检测第二光路352内的光并将光的检测传送到计算机10。如将在下文中更详细地描述的,光检测器370可以检测来自反射目标40的光。光检测器370可以包括本领域普通技术人员鉴于本文的教导将明了的任何合适的材料和部件。例如,光检测器370可以包括光电二极管传感器和检测器印刷电路板。计算机10可以使用该检测来计算并绘制目标40相对于扫描组件100的位置。
98.透镜组件外壳318还限定了用于接收安装螺钉323的通孔328以及用于容纳螺纹保持环380、透镜382和滤光片384的孔340。孔340进一步由螺纹342、外壳部分344和环形止动部346限定。如图22中最佳所见,滤光片384可以抵靠环形止动部346,而透镜382在组装时抵靠滤光片384。螺纹保持环380可以与孔340的螺纹342联接,使得螺纹保持环380将透镜382和滤光片384保持就位。因为透镜组件外壳318是整体块310的部件,所以光检测器370、透镜382和滤光片384可以相对于光学块组件300的其他部件以一致的位置和取向附接。
99.在光学块组件300的所有部件正确附接和对准的情况下,图23示出了从目标40接收的反射光束394通过光学块组件300的示例性检测。当组装时,第一外向光束390或第二外向光束392可以分别穿过由反射镜延伸部316和反射镜362限定的孔334、364进入由保护玻璃延伸部314、反射镜延伸部316和透镜组件外壳318限定的第一光路350中。第一外向光束390或第二外向光束392可以穿过孔332和保护玻璃360离开。一旦外向光束390、392从目标40反射,目标40可以引导第一反射光束394穿过保护玻璃360和孔332返回。反射镜362的内部部分可以偏转第一反射光束394并将第一光路350内的第二反射光束396引向透镜382。透镜382可以使第一反射光束394穿过滤光片384聚焦成第二光路352内的朝向光检测器370上的一位置的定向光束398。滤光片382可以通过阻挡环境光源来帮助确保只有来自第一反射光束394的光进入第二光路352。光检测器370可以记录定向光束398的检测并将该检测传送到计算机10。然后计算机10可以计算并存储在光检测器370检测到第二反射光束396的时间点处相关联的飞轮基部230的旋转位置。
100.因为光学块组件300的所有部件都附接至整体块310,所以上述反射光束的检测定时可以由计算机10一致且准确地计算。这可能有助于减少与先前光学块组件中的部件的不正确组装或错位相关联的测量误差。
101.v.示例性环境温度校准装置
102.如上所述,当扫描组件100被启用时,可能会出现误差,这可能导致目标40的位置计算不准确。如上所述,计算机10使用五棱镜242、242
′
之间的已知距离来计算并绘制检测目标的位置。五棱镜242、242
′
经由棱镜支架244固定至飞轮基部230。然而,扫描组件100可能用在不同的地点,每个地点都有不同的环境温度。例如,扫描组件100可能用在冬季月份很少有供暖设备的商店中,而同一家商店在夏季月份可能很少有冷气可用。因此,即使是单个扫描组件100也可能在各种环境温度下使用。飞轮基部230可能由诸如钢之类的材料制成,其可能由于环境温度的变化而膨胀和/或收缩。飞轮基部230的膨胀和收缩可能导致棱镜支架244之间的距离发生变化,从而导致五棱镜242、242
′
之间的距离发生变化。五棱镜242、242
′
之间距离的变化可能导致计算机10在计算和绘制目标40的位置时出现误差。
103.如上所述,飞轮组件220可以包括附接至飞轮基部230的温度传感器280。温度传感器280可以通过本领域普通技术人员鉴于本文的教导将明了的任何合适的方法与计算机10通信。温度传感器280被配置成测量扫描仪的温度并将该温度传送到计算机10。温度传感器280可以产生模拟和/或数字输出,并且它可以包括本领域普通技术人员鉴于本文的教导将明了的任何其他合适的温度测量装置。例如,可以在各种实施方式中使用二极管温度传感器、热电偶、温度计、红外温度计、热敏电阻等。
104.计算机10可以在其于本文中描述的计算中使用扫描仪温度来考虑扫描仪材料的热膨胀或收缩。计算机10因此可以调整计算以使用第一输出光束390与第二输出光束392之间经过适当调整的距离来计算并绘制目标40相对于扫描组件100及相对于彼此的距离和位置,如上所述。例如,计算机10在给定温度下可以具有第一输出光束390与第二输出光束392之间的第一已知固定距离。然后,计算机10可以在其计算中将第一输出光束390与第二输出光束392之间的固定距离替换为基于所开发算法的温度相关模型。因此,可以减少与环境温度变化相关联的误差。尽管在当前示例中,温度传感器280附接至飞轮基部230,但是温度传感器280可以附接至扫描组件的任何合适的部件,如本领域普通技术人员鉴于本文的教导将明了的。例如,温度传感器280可以附接至编码器组件260。在各种实施方式中,温度传感器280可以经由通信端口266与计算机10通信。
105.vi.adas校准
106.转向图31,参照图1中所示的某些元件,一旦扫描组件100已经确定了框架对准的状态,计算机10就进入adas传感器校准阶段。首先,计算机10将关于该状态的信息转发给adas控制系统521。adas校准系统500可以确定车辆20上一个或多个附加点的实际、精确位置,然后直接或间接地确定用于安装adas传感器510的一个或多个“控制点”的位置和/或一个或多个adas传感器510本身的位置。
107.adas校准系统500可以包括定位在车辆20前部附近的adas校准站505。在各种实施方式中,adas校准站505可以包括轮式基部501、具有光学目标534的光学目标板503、校准目标板507、扫描仪目标540以及本领域技术人员将想到的其他元件。在这些实施方式中的一些实施方式中,adas校准站505被手动移动和/或调整到可以执行adas校准的位置,而在其他实施方式中,adas校准站505静止或仅移动到大致正确的位置,然后响应于由adas校准系统500捕获的或由计算机10确定的信息移动其自身的全部或一部分就位,所有这些都是本领域技术人员鉴于本公开将想到的。
108.在一些实施方式中,相同或附加的编码反射目标40(参见图1)通过框架组件25上的一个或多个附加框架附接特征件45或车辆20上的其他点附接至车辆20。在各种实施方式中,车辆20上的这些其他点是各种adas传感器510的位置或距这些传感器已知位移的位置。在其他实施方式中,接着将使用上述对准过程所确定的框架组件25上的点的位置发送到adas控制系统521以用于adas校准过程。
109.在一些实施方式中,车辆20的车轮附接有可拆卸车轮固定装置530、532,并且从可拆卸后车轮固定装置530引导穿过可拆卸前车轮固定装置532中的光学部件的光束534到达在adas校准站505上的光学目标534以自动确定这些部件中的每一个部件的相对取向和位置,如本领域技术人员将理解的。在其他实施方式中,车轮位置和/或取向由与扫描组件100、adas控制系统521或这两者都通信的车轮对准设备确定。这些车轮在绝对基础上或相对于彼此的、相对于框架组件25上的一个或多个点的和/或相对于扫描组件100的位置和/或取向也被直接或间接地传输到adas控制系统521以用于adas校准过程。在一些实施方式中,扫描组件100比较基于车轮的测量和基于框架的测量以确定车辆20的在车辆悬架上方和下方的部件的对准和并列,例如行驶高度。adas控制系统521使用该信息来确定或估计各种adas传感器510的位置和/或对准。
110.在一些实施方式中,扫描组件100确定adas校准站505上的目标540与扫描组件100的相对位置,并因此确定adas校准站505上的目标540与adas传感器510、可拆卸车轮固定装置530、532和/或框架组件25上的特定点或车辆20的其他部件的相对位置。传感器或其他测量装置——无论是在扫描组件100上、在扫描组件100中、在扫描组件100之外或前述方式的组合——也可以检测或确定可拆卸车轮固定装置530、532、一个或多个adas传感器510、扫描组件100本身或来自平台、升降机或车辆20所搁置的机架的其他识别点的高度。
111.在各种实施方式中,计算机10确定车辆20上一些点的位置和/或取向,但不确定其他信息。在各种实施方式中,计算机10使用车辆20的制造商、型号和/或标识或adas控制系统521的类型来确定获取和/或发送到adas控制系统521以用于校准过程的数据,并且在各种实施方式中,该确定是基于特定的硬件、软件、adas校准站505、扫描组件100或所涉及的其他部件做出的。
112.在一些实施方式中,扫描组件100被设置为从一开始就收集用于对准和adas校准的目标数据,并且同时检测所有可用的、期望的和/或需要的目标的位置和/或取向。
113.在一些实施方式中,光学目标534、校准目标板507和/或adas校准站505上的目标540是静态的,而在其他实施方式中,它们是动态的或静态和动态相结合的,这可能对特定的adas控制系统521、计算机10或adas校准系统500的其他方面是有用的。
114.vii.其他信息
115.在本文中描述为控制系统、计算机、校准系统、控制器、处理器等各种项目中的每个项目都可以共同地或单独地实施为一个或多个计算机、专有计算设备或虚拟计算环境。这些中的每一个——在图32中举例说明为处理子系统600——都可以包括各自位于本地和/或彼此远程定位的处理器610和存储器620。在一些实施方式中的处理器610是从存储器620读取其程序的微控制器或通用微处理器。处理器610可以包括构造成单个单元的一个或多个部件。替代性地,当采用多部件形式时,处理器可以具有一个或多个部件,这些部件相对于其他部件远程定位。处理器的一个或多个部件可以是电子类的,包括数字电路、模拟电
路或两者。在一些实施方式中,处理器是传统的集成电路微处理器布置,比如来自美国加利福尼亚州圣克拉拉市的米申学院大道2200号邮编为95052的英特尔公司的一个或多个core i5、i7或i9处理器,或来自美国加利福尼亚州圣克拉拉市奥古斯丁大道2485号邮编为95054的advanced micro devices的beema、epyc或ryzen处理器。在替代性实施方式中,一个或多个精简指令集计算机risc处理器、专用集成电路asic、通用微处理器、可编程逻辑阵列或其他设备可以单独使用或组合使用,如本领域技术人员将想到的。
116.同样,各种实施方式中的存储器620包括一种或多种类型,比如固态电子存储器、磁存储器或光学存储器,仅举几例。作为非限制性示例,存储器620可以包括固态电子随机存取存储器ram、顺序可存取存储器sam(比如先进先出fifo类或后进先出lifo类)、可编程只读存储器prom、电可编程只读存储器eprom或电可擦除可编程只读存储器eeprom;光盘存储器(比如可记录、可重写或只读的dvd或cd-rom);磁编码硬盘驱动器、软盘、磁带或盒式介质;固态或混合驱动器;或者这些存储器类型中的多个和/或其组合。此外,各种实施方式中的存储器是易失性的、非易失性的或易失性和非易失性类的组合。
117.实现本文所述的功能、动作和方法的计算机程序通常将在诸如dvd-rom之类的物理分发介质上、或者经由诸如互联网协议之类的网络分发介质或使用其他介质的其他通信网络、或者通过此类分发介质的某种组合进行存储、分发和/或更新。这些计算机程序通常会从那些地方被复制到存储器620。当程序要运行时,这些计算机程序或者从它们的分发介质或者从它们的中间存储介质加载到计算机的执行存储器中,从而按照本文所述的方法配置计算机。所有这些操作对于计算机系统领域的技术人员来说都是众所周知的。
118.处理子系统600还可以包括从其他设备接收信息的一个或多个输入设备630,如本领域技术人员将想到的。各种实施方式将包括输入设备630,比如一个或多个指示设备、触摸屏、麦克风、照片和/或视频捕获设备、指纹读取器、其他输入设备及其组合,如本领域技术人员将想到的。同样,处理子系统600还可以包括将信息发送到其他设备的一个或多个输出设备640,如本领域技术人员将想到的。各种实施方式将包括输出设备640,比如监视器、耳机、扬声器、触摸屏、触觉输出设备、灯、警报器、喇叭、其他输出设备及其组合,如本领域技术人员将想到的。更进一步,处理子系统600可以包括一个或多个通信设备650,比如网络适配器、wi-fi收发器、蓝牙收发器、以太网适配器、usb适配器、其他能够发送和/或接收数据和/或电力的无线和有线连接设备及其组合,如本领域技术人员将想到的。通信设备650可以使处理器610与附加设备和数据源660进行通信,附加设备和数据源660可以包括网络通信设备,比如路由器和交换机、互联网、传感器、输出设备、升降机、扫描仪、数据库、档案和其他设备,如本领域技术人员将想到的。
119.本地显示器55可以靠近处理子系统600并且可由处理器610操作以向adas校准系统500的用户显示界面和信息并且接受用户确认和过程控制输入。在一些实施方式中,这样的输入和输出是可实现的和/或可以通过远程设备通过局域网或广域网进行监控,如本领域技术人员将想到的。
120.当一个动作或功能在本文中被描述为“基于”特定事物或“根据”特定事物而发生时,系统被配置为使得该动作或功能根据该事物的一个或多个特征以不同的方式执行。当一个动作或功能在本文中被描述为“仅基于”特定事物或“仅根据”特定事物执行时,该动作或功能根据该事物的一个或多个特征以不同的方式执行,但方式完全由事物的一个或多个
特征决定。
121.为简单起见,未说明或提及各种电源、地面、时序、通信、心跳和其他连接、设施和资源,尽管它们存在并且一般可用于本文提及的所有适用项目,如本领域技术人员将想到的。
122.应当理解的是,任何通过参引并入本文的专利、出版物或其他公开材料仅在所结合的材料不与定义、声明或本公开中阐述的其他公开材料冲突的范围内全部或部分地并入本文。如此,并且在必要的范围内,如本文明确阐述的公开内容取代通过参引并入本文的任何冲突材料。更具体地,通过参引并入本文但与现有定义、声明或本文阐述的其他公开材料相冲突的任何材料或其部分将仅在所结合的材料与现有的公开材料之间不发生冲突的情况下被并入。
123.还应当理解的是,本文描述的任何一种或多种教导、表达、实施方式、示例等可以与本文描述的任何一种或多种其他教导、表达、实施方式、示例等组合。因此,上述教导、表述、实施方式、示例等不应彼此孤立地看待。本领域普通技术人员鉴于本文的教导将明了可以对本文的教导进行组合的各种合适的方式。这样的修改和变化旨在包括在权利要求的范围内。
124.已经示出并描述了本发明的各种实施方式,在不脱离本发明的范围的情况下,本领域普通技术人员可以通过适当的修改来实现对本文描述的方法和系统的进一步修改。已经提到了几种这样的潜在修改,并且其他修改的对于本领域技术人员来说将是明显的。例如,上面讨论的示例、实施方式、几何形状、材料、尺寸、比率、步骤等是说明性的并且不是必需的。因此,本发明的范围应根据所附权利要求来考虑,并且应理解为不限于在说明书和附图中示出和描述的结构和操作的细节。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1