一种国产民用SAR卫星几何检校与定位精度改进方法与流程
一种国产民用sar卫星几何检校与定位精度改进方法
技术领域
1.本发明属于星载sar数据处理技术领域,涉及一种国产民用sar卫星几何检校与定位精度改进方法。
背景技术:
2.合成孔径雷达(synthetic aperture radar,sar)作为一种主动式微波传感器,具有高分辨率、全天候全天时、有效识别隐藏物等显著性优势,在民用和军事的各个领域都有一定的应用前景。随着国产sar卫星的不断发射,若卫星以组网的方式运行,能够在全球范围内快速获得高分辨率、高辐射质量的sar图像数据。然而,鉴于国产民用sar卫星影像的分辨率不断提高,几何定位能力的需求也日益增加,几何定位精度提升成为现阶段的重要研究方向。
3.在国产民用sar卫星应用水平指标中,几何定位精度占据着重要位置。国际上星载sar卫星图像几何产品质量持续提升,系统级无控制几何定位精度可达10米以内。通过对影响几何定位精度的误差源进行分析并修正,可大幅提高国产民用sar卫星无控制几何定位精度。影响sar卫星系统级几何定位精度的误差源包括:传感器参数误差、大气传播影响、相对高程误差、卫星测轨误差和多普勒中心频率估计误差等。相较于其他误差源,对于具有特定成像模式的某一带宽和脉冲宽度组合的sar卫星图像,传感器参数误差为主要且稳定的影响因素,包括:方位向起始时间和距离向起始斜距两个参数误差,因此可以将特定带脉宽组合的多景sar图像作为定标景来估计此误差源引起的误差,并对其他场景sar图像的传感器参数误差进行校正,以获得更高的无控制定位精度。此外,由于成像处理中采用的多普勒中心频率与几何定位方程中所采用的多普勒中心频率一致,因此其定位精度影响可忽略。
技术实现要素:
4.本发明解决的技术问题是:克服现有技术的不足,提供一种国产民用sar 卫星几何检校与定位精度改进方法,突破星载sar斜距误差改正、基于模型的大气延迟估计、sar收发通道电延迟参数解算等几何检校关键技术的问题。
5.本发明的技术方案是:一种国产民用sar卫星几何检校与定位精度改进方法,步骤如下:
6.(1)分析和参数化解耦几何定位的主要误差源,基于所选几何检校场的高精度控制点进行通道延迟定标,同时根据卫星相关辅助文件,计算得到总大气延迟值;
7.(2)采用r-d模型作为国产民用sar卫星几何定位模型,同时加入大气传播延迟改正模型,基于几何检校结果给出误差补偿修正量;此外,在精密星历数据的辅助下,采用卫星精密轨道数据对轨道信息进行修正,去除因轨道误差引起的几何定位误差;并依赖于外源高程数据的支撑,进行相对高程误差改正;
8.(3)进行验证评估,包含点目标评估和分布目标评估;点目标评估即基于 sar几何定标场高精度控制点的精度评估,分布目标评估即基于高精度光学 dom正射影像的精度评
估。
9.所述步骤(1)的具体过程为:
10.步骤11:以同一成像模式、同一种带脉宽组合为基准,查找出该基准对应的任意波位,根据所选几何定标场的位置制定sar卫星系统的成像任务规划;
11.步骤12:根据sar卫星系统的成像任务规划,现场适时调整几何定标场中各角反射器和有源定标器的指向,使其法线方向与波的入射方向相同;
12.步骤13:精确测定成像时各角反射器、有源定标器的地理坐标和高程信息;
13.步骤14:同一成像模式下,查找出同一种带脉宽组合的任意波位关于几何定标场区域的回波数据,进行sar成像处理;
14.步骤15:根据sar影像辅助文件和gps导航电文,获取sar卫星位置、波段波长、入射角参数,分别基于改进的saastamoinen模型和klobuchar模型,修正得到总的大气延迟值;
15.步骤16:基于所选几何检校场高精度控制点进行通道延迟定标。
16.步骤15中,所述总的大气延迟值包括对流层延迟和电离层延迟。
17.计算对流层延迟时,采用改进的saastamoinen模型进行修正,模型修正系数采用美国标准大气模型计算,标准大气模型方程:
[0018][0019]
其中h是测站高度,h
rel
是相对湿度,p为大气压力,e为大气中的水汽压力,t为大气温度。
[0020]
saastamoinen模型中,将对流层天顶总延迟tr分为对流层静力学延迟th和对流层湿延迟tw:
[0021][0022]
其中为天顶角,el为卫星仰角,φ为纬度。
[0023]
计算电离层延迟时,采用改进的klobuchar模型进行修正,其模型具体算法步骤如下:
[0024]
(a)根据已知地球半径r、地面点到卫星的仰角h、穿刺点b’与其星下点 b的距离s,计算地面点p与b’的地心角ψ=90
°‑
h-arcsin[rcosh/(r+s)];
[0025]
(b)由地面点至卫星的方位角a、地心角ψ、地面点p地理经纬度等,计算得到点b的地理经纬度
[0026][0027]
(c)根据地理北磁极s的地理经纬度转换星下点b的地理纬度为地磁纬
度
[0028][0029]
(d)计算得到点b的gps系统时间tb=(λq/15)+utc;
[0030]
(e)根据gps导航电文,获取8个电离层改正参数;根据上述8个电离层改正参数来修正电离层延时;由klobuchar模型公式,计算b’的电离层天顶延时i’:
[0031][0032]
其中,k为转换系数,等于gps l1载波频率和sar发射频率平方的比值,从sar辅助文件中获取发射波长,波长的倒数即为sar发射频率;
[0033]
(f)最终计算实际路径的电离层延时i=sec(arcsin[rcosh/(r+s)])i'。
[0034]
所述步骤16基于所选几何检校场高精度控制点进行通道延迟定标的具体过程为:
[0035]
根据步骤13中精确测得的定标器位置(x
di
,y
di
,z
di
),i=1...n,雷达位置 (xi,yi,zi),i=1...n;
[0036]
设
[0037]
其中,d0为经步骤15校正后的近距边值,计算各高精度控制点的近距边通道延迟值δdi:δdi=d0+m
x
x-di,i=1,2,3
…
,n;m
x
为距离向采样间隔。
[0038]
所述步骤(2)的具体过程为:
[0039]
步骤21:根据sar卫星系统的成像任务规划,确定几何精度验证场区域中同一成像模式下、同一种带脉宽组合的各sar回波数据;
[0040]
步骤22:根据步骤16,基于几何检校结果进行通道延迟校正;对几何精度验证场区域的各sar回波数据进行误差补偿;
[0041]
步骤23:根据步骤15,基于改进的saastamoinen模型和klobuchar模型计算每景sar影像的电离层和对流层延迟值,进行大气延迟校正;对几何精度验证场区域的各sar回波数据进行误差补偿;
[0042]
步骤24:各误差补偿后,对几何精度验证场区域的各sar回波数据进行通道的成像处理,获取sar卫星影像和各辅助文件;
[0043]
步骤25:采用距离-多普勒模型作为国产民用sar卫星几何定位模型,关联sar图像坐标和地面点的大地坐标,获得经校正后的高精度几何产品;
[0044]
步骤26:在步骤25中,在精密星历数据的辅助下,采用卫星精密轨道数据对轨道信息进行修正,去除因轨道误差引起的几何定位误差;
[0045]
步骤27:在步骤25中,依赖于外源高程数据的支撑,进行相对高程误差改正。
[0046]
所述步骤(3)的具体过程为:
[0047]
步骤31:基于sar几何定标场高精度控制点进行点目标精度评估;根据成像安排,选取几何定标验证场中各定标器,利用同轨多景和多轨多景交叉验证的方法,评估经本技术误差补偿后的平面定位精度;
[0048]
步骤32:基于高精度光学dom正射影像进行分布目标精度评估;下载国内外不同地区,经此技术误差改正后的sar卫星影像,与高精度光学dom正射影像作对比,进一步评估几何定位结果在国内外不同地区、不同地物场景、大幅度高程起伏中的稳定性。
[0049]
本发明与现有技术相比的优点在于:
[0050]
(1)技术突破:全面分析影响几何定位精度的多种误差源,从各误差源角度精确建模并进行误差检校,突破星载sar斜距误差改正、改进的大气延迟估计、sar收发通道电延迟参数解算等关键技术。
[0051]
(2)方法改进:以雷达信号的带脉宽组合为分组依据,进行sar卫星的几何检校,无需考虑侧视方向、波位号、升降轨等因素的影响。
[0052]
(3)定位结果:经几何检校后,某带脉组合模式下,点目标评估中几何定位精度可达到甚至优于1个像元,无控定位精度得到了显著提高。分布目标评估中几何定位结果在国内外不同地区、不同地物场景、大幅度高程起伏中呈现出稳定性。
[0053]
(4)创造价值:本发明可制定系统化、集成化技术方案,大大降低工作量,节约人力成本,并满足应用需求。此外,随着“高分专项”、国家空间基础设施、商业sar项目对国产民用sar卫星的立项和投入,国产高精度几何产品可逐步摆脱对外星数据的依赖。
附图说明
[0054]
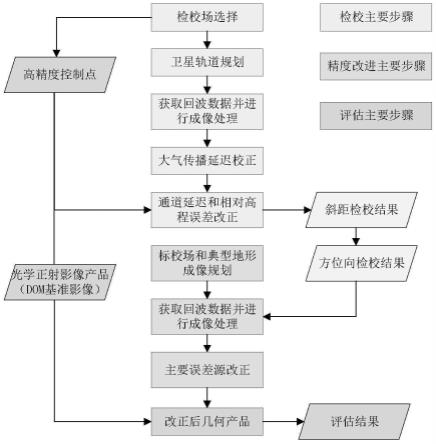
图1为本发明的国产民用sar卫星几何检校和评估方案示意图。
[0055]
图2为卫星信号穿刺点。
[0056]
图3为dem高程误差引起的平面定位误差示意图。
[0057]
图4为本发明的星载sar影像上的三面角反射器目标示例。
具体实施方式
[0058]
下面结合图1,以某一种带脉宽组合的成像模式为例,对本发明的实施方式做详细说明:
[0059]
步骤1:以同一成像模式、同一种带脉宽组合为基准,查找出该基准对应的任意波位,根据所选几何定标场的位置制定sar卫星系统的成像任务规划。
[0060]
步骤2:根据sar卫星系统的成像任务规划,现场适时调整几何定标场中各角反射器和有源定标器的指向,使其法线方向与波的入射方向一致。
[0061]
步骤3:精确测定每次成像时各角反射器、有源定标器的地理坐标和高程信息:(x
di
,y
di
,z
di
),i=1...n。
[0062]
步骤4:同一成像模式下,查找出同一种带脉宽组合的任意波位关于几何定标场区域的回波数据,进行sar成像处理。
[0063]
步骤5:根据sar影像辅助文件和gps导航电文,获取sar卫星位置、波段波长、入射角等关键参数,分别基于改进的saastamoinen模型和 klobuchar模型计算每景sar影像的电离层和对流层延迟值,得到总的大气延迟值。
[0064]
计算对流层延迟,本发明对流层延迟采用改进的saastamoinen模型进行修正,模型修正系数采用美国标准大气模型计算,标准大气模型方程:
[0065]
[0066]
其中h是测站高度,h
rel
是相对湿度,p为大气压力,e为大气中的水汽压力,t为大气温度。
[0067]
saastamoinen模型中,将对流层天顶总延迟tr分为对流层静力学延迟th和对流层湿延迟tw:
[0068][0069]
其中为天顶角,el为卫星仰角,φ为纬度。
[0070]
进一步计算电离层延迟,本发明对流层延迟采用改进的klobuchar模型进行修正。其模型具体算法步骤如下:
[0071]
(1)由图2,根据已知地球半径r、地面点到卫星的仰角h、穿刺点b’与其星下点b的距离s,计算地面点p与b’的地心角ψ:ψ=90
°‑
h-arcsin[rcosh/(r+s)]
[0072]
(2)由地面点至卫星的方位角a、地心角ψ、地面点p地理经纬度等,计算点b的地理经纬度
[0073][0074]
(3)根据地理北磁极s的地理经纬度转换星下点b的地理纬度为地磁纬度
[0075][0076]
(4)计算点b的gps系统时间tb:tb=(λq/15)+utc
[0077]
(5)根据gps导航电文,获取8个电离层改正参数:α0,α1,α2,α3,β0,β1,β2,β3。根据这8个关键参数来修正电离层延时。由klobuchar 模型公式,计算b’的电离层天顶延时i’:
[0078][0079]
其中,k为转换系数,等于gps l1载波频率和sar发射频率平方的比值,从sar辅助文件中获取发射波长,波长的倒数即为sar发射频率。
[0080]
(6)最终计算实际路径的电离层延时i,则
[0081]
i=sec(arcsin[rcosh/(r+s)])i'。
[0082]
步骤6:基于所选几何检校场的高精度控制点进行通道延迟定标。采用同一成像模式、同一种带脉宽组合的多景几何检校场sar影像为定标景,引入定标器准确的地理坐标、高程信息和卫星轨道星历信息,计算多景sar影像数据的通道延迟值。
[0083]
具体算法步骤如下:
[0084]
根据步骤3中精确测得的定标器位置(x
di
,y
di
,z
di
),i=1...n,雷达位置 (xi,yi,zi),i=1...n。
[0085]
设
[0086]
其中,d0为经步骤5校正后的近距边值,所以,计算各高精度控制点的近距边通道
延迟值δdi:δdi=d0+m
x
x-di,i=1,2,3
…
,n。m
x
为距离向采样间隔。
[0087]
步骤7:取多次、多个场景通道延迟的平均值作为该成像模式下同一带脉组合的系统的通道延迟定标值:
[0088][0089]
步骤8:根据sar卫星系统的成像任务规划,确定几何精度验证场区域中同一成像模式下、同一种带脉宽组合的各sar回波数据。
[0090]
步骤9:根据步骤6,基于几何检校结果进行通道延迟校正。对几何精度验证场区域的各sar回波数据进行误差补偿。
[0091]
步骤10:根据步骤5,基于改进的saastamoinen模型和klobuchar模型计算每景sar影像的电离层和对流层延迟值,进行大气延迟校正。对几何精度验证场区域的各sar回波数据进行误差补偿。
[0092]
步骤11:各误差补偿后,对几何精度验证场区域的各sar回波数据进行通道的成像处理,获取sar卫星影像和各辅助文件。
[0093]
步骤12:采用距离-多普勒(range-doppler,r-d)模型作为国产民用 sar卫星几何定位模型,关联sar图像坐标和地面点的大地坐标,获得经几何校正后的高精度产品。
[0094]
步骤13:此外,在步骤12中,在精密星历数据的辅助下,采用卫星精密轨道数据对轨道信息进行修正,去除因轨道误差引起的几何定位误差。
[0095]
步骤14:在步骤12中,依赖于外源高程数据的支撑,进行相对高程误差改正。由图3,高程误差导致的定位误差为δh/tanθi,θi为入射角。入射角与高程误差引入的定位误差成反比。
[0096]
验证评估包含点目标评估和分布目标评估。点目标评估即基于sar几何定标场高精度控制点的精度评估;分布目标评估即基于高精度光学dom正射影像的精度评估。
[0097]
步骤15:寻找几何验证场各sar影像中的定标器,图4则为本发明的星载sar影像上的三面角反射器目标示例。将步骤12中求解的几何验证场区域各sar影像中每个角反射器、有源定标器的地理经纬度,与步骤3中精确测定的地理坐标值进行比较。所得差值即为每个高精度控制点经误差补偿后的距离向和方位向定位误差。
[0098]
步骤16:统计所有高精度控制点的平面定位误差的标准差,即得到sar 系统在某种成像模式、某种带脉宽组合下经几何检校后无控情况下的几何定位精度。
[0099]
步骤17:下载国内外不同地区,经此技术误差改正后的sar卫星影像,分布目标可选择sar影像中8种典型且易辨认的场景:道路、湖泊、江河、丘陵、山地、田地、海岸线、建筑物。
[0100]
步骤18:根据步骤17下载的各sar卫星影像,与高精度光学dom正射影像作对比,进一步验证几何定位结果在国内外不同地区、不同地物场景、大幅度高程起伏中是否呈现出稳定性。
[0101]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术
实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1