一种用于测量边坡失稳的无线测量系统及试验方法
1.本发明涉及岩土工程技术领域,具体而言,涉及一种用于测量边坡失稳的无线测量系统及试验方法。
背景技术:
2.目前地质灾害已严重影响到人类的生存、发展、工程建设乃至休闲活动等方面,而且地质环境复杂多样的特殊性也决定了地质灾害的多样性与区域变异性。滑坡作为地质灾害中最常见的一种,指斜坡上岩土在重力作用为主下,由于受河流冲刷、地下水活动、雨水浸泡、地震及人工切坡等因素影响,改变坡体内一定部位的软弱带(或面)中应力状态,或因水或其他物理、化学作用降低其强度,以及因震动或其他作用破坏其结构,该软弱带在应力大于强度下产生剪切破坏,使软弱带以上的岩土失稳而作整体或几大块沿之向下和向前滑动的自然现象;同时,滑坡也会受多种外界因素耦合诱发,每年发生大量的滑坡、崩塌、泥石流等地质灾害,造成交通中断、河道堵塞、村镇掩埋、房屋摧毁、农田破坏,形成巨大的经济和人员损失。
3.如何更精准获得边坡变形数据,在目前的滑坡模拟试验中,研究者多采用有线位移传感器对滑坡过程中边坡的几何形态参数进行测量,而有线位移传感器会在土体滑移时产生一个牵引力,使得试验结果无法准确反映实际工程中的边坡失稳过程。
技术实现要素:
4.本发明的目的在于提供一种用于测量边坡失稳的无线测量系统及试验方法,不仅能获得更精准的边坡变形位移数据,且使后期能准确的对边坡变形过程中土体运动特征和运动状态进行分析,精度高、准确性好、操作简单。
5.为实现本发明目的,采用的技术方案为:一种用于测量边坡失稳的无线测量系统,包括箱体、边坡模型和数据采集装置,箱体呈敞开状,边坡模型安装在箱体内,且数据采集装置包括无线位移测量仪、非接触式外部变形测量仪器,无线位移测量仪埋设于边坡模型内部,非接触式外部变形测量仪器位于边坡模型外侧或边坡模型上方。
6.进一步的,所述无线位移测量仪为多个,多个无线位移测量仪分层埋设于边坡模型内部。
7.进一步的,所述无线位移测量仪为无线位移传感器。
8.进一步的,所述非接触式外部变形测量仪器至少为三个,且三个非接触式外部变形测量仪器分别位于边坡模型三侧。
9.进一步的,所述非接触式外部变形测量仪器为高清摄像头。
10.进一步的,还包括降雨装置,降雨装置包括位于箱体上方的导流管和安装在导流管上的多个降雨喷头,且导流管上安装有流量计,箱体底部还设有排水口。
11.进一步的,还包括水箱,导流管的进口端与水箱连接,且排水口与水箱之间还连接有排水管路。
12.进一步的,多个所述降雨喷头分为多组,同一组降雨喷头上的孔径相同,不同组的降雨喷头的孔径不同。
13.进一步的,还包括位于箱体上方的光照装置。
14.进一步的,还包括冲击荷载施压装置,且边坡模型包括位于边坡模型上方的支架,支架上吊设有冲击锤。
15.进一步的,还包括震动装置,震动装置包括固定底座和震动底座,震动底座安装在固定底座上,箱体安装在震动底座上,且固定底座上还安装有驱动震动底座上下抖动的驱动结构。
16.进一步的,所述固定底座上具有多个支撑脚,且震动底座上具有多个钢管,多个支撑脚一一滑动插设在钢管内。
17.进一步的,所述驱动结构包括转动支承在固定底座上的转轴和固定安装在固定底座上的发动机,转轴上安装有凸轮和差速器,震动底座的下表面支撑在凸轮上,且发动机的输出端还安装有与差速器输入端啮合的主动齿轮。
18.进一步的,所述震动装置还包括安装底座,安装底座安装在震动底座上,且安装底座在震动底座上可水平方向摆动。
19.进一步的,所述转轴上还安装有驱动齿轮,震动底座上还开设有通槽,且安装底座上还安装有贯穿通槽的拨块,拨块与驱动齿轮啮合;所述震动底座上还安装有驱动安装底座复位的复位机构。
20.进一步的,所述复位机构包括分别安装在安装底座前后两侧的导向块,且其中一个导向块与安装底座之间安装有复位弹簧。
21.进一步的,所述复位机构还包括分别安装在震动底座前后两侧的导向杆,两个导向块分别滑动套设在两个导向杆上,复位弹簧位于导向块与安装底座之间,且导向杆的延伸端安装有限位螺母。
22.进一步的,所述数据采集装置还包括用于测量转轴转速的激光转速仪。
23.进一步的,所述震动装置上还安装有两个可相对运动的限位块,且两个限位块位于箱体的相对两侧。
24.进一步的,所述限位块为角钢,震动装置上具有t型滑槽,限位块的下方具有与t型滑槽滑动配合的插接块,且限位块上还具有与和锁紧限位块的锁紧螺钉。
25.进一步的,所述边坡模型通过多个纵向等宽的坡体拼凑而成,且相邻两个坡体之间采用软膜分开。
26.一种用于测量边坡失稳的试验方法,包括如上所述的无线测量系统,具体包括如下步骤:
27.将预埋有无线位移测量仪的边坡模型置于箱体内,无线位移测量仪对边坡模型的几何形态参数进行测量采集,并通过安装在箱体上的非接触式外部变形测量仪器对边坡模型在滑移过程中的图像进行实时捕捉。
28.进一步的,通过降雨喷头向边坡模型喷洒水,以模拟降雨环境。
29.进一步的,模拟降雨环境时可控制不同的降雨喷头,模拟不同的降雨强度和雨滴的大小。
30.进一步的,通过光照装置对边坡模型暴晒,模拟暴晒环境下水分蒸发的环境。
31.进一步的,通过使冲击荷载施压装置中的冲击锤自由掉落于边坡模型上,模拟开挖载荷情况。
32.进一步的,通过震动装置驱动箱体震动,使边坡模型震动,以模拟地震环境。
33.本发明的有益效果是,
34.1、本发明可通过将无线位移测量仪埋设于边坡模型内,使边坡模型在产生形变时,无线位移测量仪可以精准的测量出边坡变形位移数据,使后期能准确的对边坡变形过程中土体运动特征和运动状态进行分析,精度高、准确性好、操作简单。
35.2、本发明可通过非接触式外部变形测量仪器进行图像采集,对边坡模型在滑移过程中进行图像实时捕捉,使后期在边坡变形分析过程中可结合图像数据进行分析,使精度高、准确性好。
36.3、本发明通过降雨装置模拟降雨环境、通过光照装置模拟暴晒环境下水分蒸发环境、通过冲击荷载施压装置模拟开挖卸荷型滑坡、通过震动装置模拟地震环境,使测量过程中可针对不同影响因素进行试验测量,既可以实现单因素影响下的滑坡模拟试验,也可以实现双因素或多因素影响下的滑坡模拟试验,有利于分析不同情况下的滑坡规律。
37.4、本发明还可通过更换不同大小的箱体来实现对不同规模的边坡模型进行安装,从而可以模拟不同规模的边坡模型在单因素影响或双因素或多因素影响下的滑坡规律。
38.5、本发明还可通过调节发动机的频率来改变箱体震动的力度大小来模拟不同震级的地震波,可分析在不同震级下的滑坡规律。
39.6、本发明还可通过控制降雨喷头和调节水流量来模拟不同的降雨量,可分析在不同降雨程度下的滑坡规律。
40.7、本发明通过设置水箱,将导流管的进口端与水箱连接,并通过排水管路将箱体与水箱之间连接,不仅使水箱能对降雨装置供水,且使降雨装置在降雨后产生的水可通过排水管路重新回流至水箱内,使水箱内的水实现循环利用。
附图说明
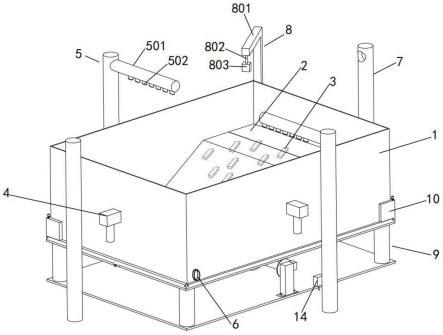
41.图1是本发明提供的用于测量边坡失稳的无线测量系统的结构图;
42.图2是图1中震动装置的结构图;
43.图3是驱动结构的安装结构图;
44.图4是震动底座的仰视图;
45.图5是限位块的结构图。
46.附图中标记及相应的零部件名称:
47.1、箱体,2、边坡模型,3、无线位移测量仪,4、非接触式外部变形测量仪器, 5、降雨装置,6、排水口,7、光照装置,8、冲击荷载施压装置,9、震动装置, 10、限位块,11、t型滑槽,12、插接块,13、锁紧螺钉,14、激光转速仪;
48.501、导流管,502、降雨喷头;
49.801、支架,802、悬挂绳,803、冲击锤;
50.901、固定底座,902、震动底座,903、钢管,904、支撑脚,905、转轴,906、发动机,907、主动齿轮,908、差速器,909、凸轮,910、驱动齿轮,911、安装底座,912、通槽,913、拨块,914、导向块,915、导向杆,916、限位螺母,917、复位弹簧,918、缺口。
具体实施方式
51.下面通过具体的实施例子并结合附图对本发明做进一步的详细描述。
52.如图1所示,本发明提供的一种用于测量边坡失稳的无线测量系统,包括箱体 1、边坡模型2和数据采集装置,箱体1呈敞开状,箱体1为矩形,而箱体1的具体大小可根据实际情况进行修改调整,且为了方便对边坡模型2的运动情况进行观察,箱体1采用透明箱体1。所述边坡模型2安装在箱体1内,边坡模型2大小远远箱体1的容量,使边坡模型2在模拟测量过程中,边坡模型2在箱体1内有足够的空间可移动,避免因箱体1对边坡模型2限制而影响测量结果。所述数据采集装置包括无线位移测量仪3、非接触式外部变形测量仪器4,无线位移测量仪3主要用于对滑坡过程中边坡的几何形态参数进行测量,其本身具有无线通信功能。非接触式外部变形测量仪器4主要用于对边坡模型2进行图像采集,为了使采集视角范围更广,可将非接触式外部变形测量仪器4安装在边坡模型2的外侧或边坡模型2的上方;通过安装非接触式外部变形测量仪,使本发明在滑坡测量时,非接触式外部变形测量仪对边坡模型2的滑坡情况进行图像实时捕捉,使后期在边坡变形分析过程中可结合图像数据进行分析。
53.在本发明中,无线位移测量仪3和非接触式外部变形测量仪器4的输出端均需与现有边坡失稳测量系统中所用的数据处理与控制模块配合使用,即无线位移测量仪3和数据处理与控制模块无线通信连接,无线位移测量仪3的数据传输引脚与数据处理与控制模块的i/o端连接,这是本领域技术人员的公知常识;当然,作为一选项,可采用无线通信模块将无线位移测量仪3和数据处理与控制模块连接。由于非接触式外部变形测量仪器4在安装时并不会与边坡模型2进行接触,即在边坡失稳试验过程中,非接触式外部变形测量仪器4并不会对边坡模型2的运动造成影响,因此,非接触式外部形变测量仪器和数据处理与控制模块之间的连接可采用有线连接。
54.当需要进行边坡失稳试验时,将预埋有无线位移测量仪3的边坡模型2放置于箱体1内,通过模拟边坡通常所受到的环境,边坡在该环境下滑动,滑动过程中,无线位移测量仪3对边坡模型2中的土体运动情况进行检测,非接触式外部变形测量仪器4在边坡模型2滑动过程中进行实时图像采集,无线位移测量仪3检测的结果和非接触式外部变形测量仪器4采集的信息传输给数据处理与控制模块,通过数据处理与控制模块进行分析处理,从而得到边坡滑动过程中土体运动特征和运动状态,根据土体运动特征和运动状态即可进行后续的分析。
55.在一些实施方式中,所述无线位移测量仪3为多个,多个无线位移测量仪3在安装时,多个无线位移测量仪3可分为多组,每组中的无线位移测量仪3也为多个,每组中的多个无线位移测量仪3均匀分布,多组无线位移测量仪3沿边坡的高度方向分层预埋在边坡模型2内,多个无线位移测量仪3可分别对边坡模型2中不同位置处的土体运动情况进行检测,从而整体反映出滑坡情况,使检测的结果更加精准。
56.在一些实施方式中,所述无线位移测量仪3为无线位移传感器,无线位移传感器能对边坡模型2在滑坡试验中的土体运动情况进行精确采集,保证后续试验及理论研究基础的准确性。
57.在一系诶实施方式中,所述非接触式外部变形测量仪器4至少为三个,三个非接触式外部变形测量仪器4分别位于边坡模型2的三侧,此处,边坡模型2的三侧可为边坡模型2
的前侧、后侧、左侧、右侧、上侧中的任意三侧,而并非指边坡模型2的相邻三侧,主要保证多个非接触式外部变形测量仪器4可共同对边坡模型2 进行全方位的图像采集,保证了数据的完整性,不仅方便后续试验或理论研究,且保证了后续试验和理论研究的准确性。
58.在一些实施方式中,所述非接触式外部变形测量仪器4为高清摄像头,保证采集的图像清晰度更高,使后续试验和理论研究时可清楚的查看到边坡模型2的变形情况,保证后续试验和理论研究的准确性。
59.在一些实施方式中,用于测量边坡失稳的无线测量系统还包括降雨装置5,降雨装置5主要用于模拟降雨环境,从而可对边坡模型2在降雨环境下的土体运动特征和运动状态进行分析。所述降雨装置5可包括位于箱体1上方的导流管501,导流管501可迂回排布,导流管501的覆盖面积大于边坡模型2的投影面积,且导流管501上均匀布置有多个降雨喷头502,相邻两个降雨喷头502之间的间距相等,使多个降雨喷头502均布在边坡模型2的上方;同时,为了模拟不同降雨量,还可在导流管501的进口端安装一个流量计,通过控制导流管501内水的流量,以此来控制降雨的大小。本发明可通过调节导流管501内的水流量,以此来调节降雨的大小,从而模拟出不同大小的降雨环境,从而可以分析边坡模型2在不同降雨环境下的土体运动特征和运动状态,使后续的试验和理论研究更加精准。
60.所述箱体1底部还设有排水口6,排水口6处还可安装开关阀,可通过开关阀来控制排水口6的打开与关闭,当需要测试边坡模型2在雨水浸泡下的土体运动特征和运动状态时,可通过开关阀,降雨喷头502喷洒出的水会储存在箱体1内,随着箱体1内的水逐渐增多,箱体1内的水对边坡模型2进行浸泡,从模拟出边坡在雨水中浸泡的环境,此时,可对边坡模型2的土体运动特征和运动状态进行分析,从而得出边坡在雨水浸泡过程中的土体运动特征和运动状态。
61.在一些实施方式中,用于测量边坡失稳的无线测量系统还包括水箱(图中未示出),水箱单独安装在箱体1的外侧,为了方便水箱与箱体1之间的管道连接,可将排水口6、引流管的进口端和水箱设置在箱体1的同一侧,将导流管501的进口端延伸至箱体1内,并在导流管501的进口端安装一个水泵,水泵通过变频电机驱动,使水泵的频率可进行调节,同时,排水口6与水箱之间还可连接排水管路,排水管路的进口端高于排水管路的出口端,使箱体1内的水可自动沿排水管路进入到水箱内,从而模拟出降雨后自然排水的过程,使后期试验环境可完全与大自然环境一致,使后续的试验和理论研究更加精准。
62.在一些实施方式中,多个所述降雨喷头502分为多组,同一组降雨喷头502上的孔径相同,不同组的降雨喷头502的孔径不同,每一组降雨喷头502均均布在边坡模型2的上方,为了方便对每一组降雨喷头502的控制,每个降雨喷头502上均配设一个单独控制的电磁阀,电磁阀的输入端可和数据处理与控制模块的输出端电连接,当需要模拟不同的雨滴大小时,可直接打开对应孔径降雨喷头502上的电磁阀即可;同时,此处可将降雨喷头502设置为多组的形式与控制水流量的方式共同配合,不仅可模拟出雨滴的大小,还可模拟出的降雨量范围更广,从而模拟出边坡模型2在不同降雨量的情况下产生的滑坡情况,使后续可分析出边坡模型2在不同降雨量下的土体运动特征和运动状态。
63.在一些实施方式中,用于测量边坡失稳的无线测量系统还包括位于箱体1上方的光照装置7,光照装置7主要用于模拟太阳光对边坡的照晒,该光照装置7具体为两个光源,两个光源沿边坡模型2的中轴线对称排布,通过两个光源共同配合,保证两个光源能照射在
整个边坡模型2上;同时,每个光源均可采用多个发光散热组件共同组成,且每个光源的照射强度可调节,从而可模拟出不同的光照强度。由于降雨后,边坡的湿度大大提高,使土壤中的含水量升高,而在太阳照射下,土壤内的水份会被蒸发,蒸发后的边坡表面会产生皲裂,边坡的稳定性会降低,边坡更容易产生滑坡,此处,通过光照装置7对边坡模型2进行照射来模拟太阳光对边坡照晒,能有效模拟出边坡在太阳照晒下的情况,通过无线位移测量仪3对边坡模型 2的测量,有效测量出边坡在降雨后太阳光照晒下的土体运动特征和运动状态,以便于后续的试验和理论研究。
64.在一些实施方式中,用于测量边坡失稳的无线测量系统还包括冲击荷载施压装置8,冲击荷载施压装置8主要模拟巨石在边坡上滚动的场景,而冲击载荷施压装置包括位于边坡模型2上方的支架801,支架801上安装有悬吊绳,悬吊绳上吊设有冲击锤803;为了方便对冲击锤803与悬吊绳之间的连接,可在悬吊绳下端安装一个挂钩,在冲击锤803上开设一个挂孔,冲击锤803在安装时直接挂设在挂钩上即可。当需要测量巨石在边坡上滚动时土体的运动特征和运动状态,可剪断悬吊绳,使冲击锤803自由下落到边坡模型2上,并沿着边坡模型2滚动,此时,通过无线位移测量仪3对边坡模型2的测量,从而测量出边坡在巨石滚动情况下的土体运动特征和运动状态,以便于后续的试验和理论研究。此处,悬吊绳可采用铁丝,冲击锤803可采用外表不规则的铁锤。
65.在一些实施方式中,如图2至图5所示,用于测量边坡失稳的无线测量系统还包括震动装置9,震动装置9主要是驱动箱体1震动,以此使安装在箱体1内的边坡模型2进行震动,从而模拟地震场景下边坡的运动情况。所述震动装置9包括固定底座901和震动底座902,震动底座902位于固定底座901的上方,且固定底座 901上安装有驱动结构,通过驱动结构对震动底座902的驱动,使震动底座902进行上下抖动和前后摆动;同时,用于安装边坡模型2的箱体1安装在震动底座902 上,使震动底座902在震动的同时带动箱体1同步震动,从而使安装在箱体1内的边坡模型2同步震动,从而模拟出边坡在地震环境下的运动情况,此时,通过对边坡模型2的运动情况进行测量,后续可根据该测量结果对地震情况下的边坡运动情况分析。
66.在一些实施方式中,所述固定底座901上具有多个支撑脚904,支撑脚904至少为两个,多个支撑脚904可沿固定底座901对称排布,多个支撑脚904也可均匀的排布在固定底座901上;同时,震动底座902上还具有多个钢管903,多个钢管 903的位置与多个支撑脚904的位置一一对应,且多个支撑脚904一一插设在多个钢管903内,并在受到外力的情况下支撑脚904可在钢管903内进行上下滑动,因此,支撑脚904的形状与钢管903的内径形状相同,且钢管903内壁与支撑脚904 外壁间隙配合。通过支撑脚904与钢管903配合,在满足对震动底座902支撑的同时使震动底座902受到驱动结构的驱动后可进行上下运动,在保证震动底座902上下抖动的同时使震动底座902的结构更加稳固。
67.在一些实施方式中,所述驱动结构包括通过两个轴承座转动支承在固定底座 901上的转轴905和固定安装在固定底座901上的发动机906,此处,发动机906 可采用变频电机,转轴905上可安装有凸轮909和差速器908,差速器908可位于转轴905中部,发动机906的输出轴上安装有主动齿轮907,主动齿轮907与差速器908啮合,使发动机906转动时带动转轴905转动;同时,转轴905上的凸轮909 可为一个也可为多个,凸轮909的最大半径大于转轴905与震动底座902之间间距,凸轮909的最小半径小于转轴905与震动底座902之间的间
距。当凸轮909转动至最高点时,凸轮909将震动底座902顶起,此时震动底座902位于最高位置,震动底座902支撑在凸轮909上;当凸轮909转动至最低点时,凸轮909失去对震动底座902的支撑,震动底座902通过自身的重力自动向下运动,震动底座902位于最低位置,通过转轴905带动凸轮909持续转动,从而使震动底座902往复上下运动,从而使箱体1和安装在箱体1内的边坡模型2受到纵向的震动,从而模拟出地震中的纵波。
68.在一些实施方式中,所述震动装置9还包括安装底座911,安装底座911安装在震动底座902上,且安装底座911在震动底座902上可水平方向摆动;所述箱体 1安装在安装底座911上,因此,安装底座911在水平方向摆动时,箱体1和安装在箱体1内的边坡模型2均会同步摆动,从而模拟出地震下的横波。通过安装底座 911在水平方向的摆动与震动底座902在竖直方向的抖动,共同模拟出地震中的横波与纵波,使边坡模型2受到的震动与地震波相同,通过对边坡模型2的运动情况进行分析,从而得出边坡在地震过程中的运动情况。
69.在一些实施方式中,所述转轴905上还安装有驱动齿轮910,转轴905在转动时,驱动齿轮910随转轴905同步转动;同时,震动底座902上还开设有通槽912,通槽912呈长腰型或矩形,通槽912的长度方向与转轴905的轴线方向水平垂直,且安装底座911上还安装有拨块913,拨块913贯穿通槽912向驱动齿轮910延伸,拨块913的延伸端呈齿状,拨块913的延伸端与驱动齿轮910啮合。此处,驱动齿轮910与拨块913啮合时,震动底座902处于最低位置,即,此时凸轮909未将震动底座902顶起。所述震动底座902上还安装有复位机构,其复位机构主要是用于驱动位移后的安装底座911进行复位。
70.当转轴905上的驱动齿轮910在转动时,驱动齿轮910拨动拨块913,拨块913 在被拨动时带动安装底座911同步移动,从而使安装底座911在水平方向产生位移,而安装底座911在移动后,复位机构驱动安装底座911复位,且安装底座911在复位后,当驱动齿轮910与拨块913再次啮合时,驱动齿轮910再次驱动安装底座911 移动,从而使安装底座911实现往复运动。通过安装底座911在水平方向的往复运动和垂直方向的往复运动,使箱体1和箱体1内的边坡模型2在水平方向的往复运动和垂直方向的往复运动,从而共同模拟出边坡模型2在地震下的场景,通过对边坡模型2的运动情况进行分析,从而得出边坡在地震过程中的运动情况。
71.在一些实施方式中,所述复位机构包括分别安装在安装底座911前后两侧的导向块914,一个导向块914呈“丨”型,另一个导向块914呈“7”型,也可两个导向块914均呈“7”型,即至少一个导向块914内壁与震动底座902侧壁之间具有一定间距,使安装底座911在震动底座902上可产生相对位移,通过两个导向块914 共同配合,在保证安装底座911能往复运动的情况下使两个导向块914分别对安装底座911的两侧进行限位,避免安装底座911在往复运动过程中过度位移。当一个导向块914呈“丨”型、另一个导向块914呈“7”型时,呈“7”型的导向块914 内壁与震动底座902之间安装有复位弹簧917;当两个导向块914均呈“7”型时,可在其中一个导向块914内壁与震动底座902之间安装有复位弹簧917,也可两个导向块914内壁与震动底座902之间均安装复位弹簧917。当转轴905转动过程中驱动齿轮910拨动拨块913使安装底座911在震动底座902上产生为位移时,复位弹簧917被拉伸或被压缩,当安装底座911产生位移后,由于驱动齿轮910不能继续拨动拨块913,使拨块913失去驱动齿轮910的作用力,此时,通过复位弹簧917 自身的弹力,使复位弹簧917在收缩或自动复位时推动安装底座911,使安装底座 911自动复位。
72.在本发明中,位于安装底座911前后两侧的导向块914也可均为“丨”型,此时,震动底座902前侧或震动底座902后侧或震动底座902前后两侧均开设缺口918,导向块914与该缺口918滑动配合,且导向块914内侧面与缺口918底部之间具有一定间隙,复位弹簧917位于缺口918底部与导向块914之间。通过导向块914与缺口918的配合,使安装底座911在震动底座902上需进行往复运动时,导向块914 在缺口918内滑动,当导向块914运动中缺口918底部时则不能继续前进,使安装底座911也不能继续前进,从而对安装底座911的位移进行限制。
73.由于本发明中的转轴905在转动时驱动齿轮910和凸轮909均会同步转动,而驱动齿轮910在转动时拨动拨块913使安装底座911在水平方向产生位移,而凸轮 909在转动时会将震动底座902顶起,而震动底座902在顶起的同时,安装底座911 和箱体1均会同步向上运动,因此,当驱动齿轮910在拨动拨块913后,拨块913 不仅会水平方向产生位移远离驱动齿轮910,且拨块913会随震动底座902、安装底座911同步向上运动远离驱动齿轮910,此时,复位弹簧917座在推动安装底座911 复位时,拨块913与驱动齿轮910不会发生碰撞,而当震动底座902和安装底座911 向下运动时,拨块913再次与驱动齿轮910啮合。
74.在一些实施方式中,所述复位机构还包括分别安装在震动底座902前后两侧的导向杆915,导向杆915的轴线方向与安装底座911的位移方向相同,且复位弹簧917套设在导向杆915上,导向块914上具有与导向杆915滑动配合的通孔,复位弹簧917的一端与震动底座902的侧面抵紧,复位弹簧917的另一端与导向块914 抵紧,而导向杆915的延伸端还具有限制导向块914脱离导向杆915的限位螺母916。此处,当安装底座911前后两侧的导向块914均为“丨”型,导向杆915位于缺口 918内;同时,震动底座902前后两侧的导向杆915也可以均为多个,当位于震动底座902同一侧的导向杆915为多个时,多个导向杆915间隔排布,此时,复位弹簧917也为多个,多个复位弹簧917分别一一套设在多个导向杆915上,且导向块 914上的通孔也为多个。通过导向块914与导向杆915滑动配合,使安装底座911 在水平运动时,通导向杆915与导向块914的配合,使安装底座911只能前后往复运动不能左右运动,避免安装底座911在震动底座902上随意摆动,使安装底座911 与震动底座902之间的稳定性得到保证。
75.在一些实施方式中,所述震动装置9中的安装底座911上还安装有两个限位块 10,当箱体1安装在安装底座911上后,两个限位块10分别位于箱体1的相对两侧,即两个限位块10可位于箱体1的两个相对面外侧也可位于箱体1的两个对角处;同时,两个限位块10之间的间距可调节,即两个限位块10可相对靠近或相对远离,当两个限位块10靠近时,箱体1被卡紧在两个限位块10之间,使箱体1实现固定,当两个限位块10远离时,限位块10与箱体1失去卡紧,此时可将箱体1从安装底座911上取下。通过两个限位块10共同配合,不仅使箱体1的安装更加方便,且使安装底座911上可安装不同尺寸的箱体1。
76.在一些实施方式中,所述限位块10为角钢,角钢用于对箱体1的直角处进行包覆,且两个角钢对箱体1的两个对角包覆;所述震动装置9中安装底座911上还具有t型滑槽11,t型滑槽11为贯穿通槽912,t型滑槽11的开口宽度小于t型滑槽 11的槽底宽度,且t型槽滑的轴线方向与箱体1的对角线方向一致;所述限位块10 下端还具有插接块12,插接块12位于限位块10的转角下方,插接块12与t型滑槽11滑动配合,且限位块10上还具有螺纹孔,螺纹孔的上端贯穿限位块10上端面,螺纹孔的下端贯穿插接块12下端面,该螺纹孔内还安装有
锁紧螺钉13。通过拧紧锁紧螺钉13,锁紧螺钉13下端抵紧在t型滑槽11槽底,从而使插接块12锁紧固定在t型滑槽11内;当需要调节限位块10的位置时,松动锁紧螺钉13,使锁紧螺钉13下端失去与t型滑槽11槽底的抵紧,插接块12失去锁紧,插接块12在t型滑槽11内可正常滑动。
77.在本实施方式中,限位块10还可直接采用立板结构,此时,限位块10可采用四个,使四个限位块10分别位于箱体1的四个面外侧,此时,t型滑槽11需设置成两个,一个t型滑槽11沿安装底座911的长度方向延伸,另一t型滑槽11沿安装底座911的宽度方向延伸,使两个t型滑槽11呈十字交错排布,其中两个限位块10下端的插接块12分别插设在一个t型滑槽11的两端,另两个限位块10下端的插接块12分别插设在另一个t型滑槽11的两端,通过四个限位块10的共同配合,使四个限位块10分别对箱体1的四个面进行阻挡,从而使箱体1安装在安装底座 911上后,箱体1不可在安装底座911上移动,使箱体1实现固定安装。
78.在一些实施方式中,所述数据采集装置还包括用于测量转轴905转速的激光转速仪14,具体的,激光转速仪14可直接安装在固定底座901上或轴承座上,且转轴905上还安装有与激光转速仪14对应的反光纸,反光纸配合激光转速仪14对转轴905的转速进行检测,从而得出驱动齿轮910的转速,从而得出震动频率,方便后续记录和计算数据。此处,激光转速仪14还可安装在震动装置外侧,而激光转速仪14的具体安装位置可根据实际使用情况进行调整。
79.在一些实施方式中,所述边坡模型2通过多个纵向等宽的坡体拼凑而成,且相邻两个坡体之间采用软膜分开,使边坡模型2的变形位移数据在后期分析过程中可直接采用条分法进行分析计算,使后期分析计算更加简单方便。
80.本测量系统中,非接触式外部变形测量仪器4、降雨装置5、光照装置7、冲击荷载施压装置8等可共同集成安装,即,在安装时,可直接搭建一个棚架,将线位移测量仪、非接触式外部变形测量仪器4、降雨装置5、光照装置7、冲击荷载施压装置8等共同安装在棚架上;当然,本测量系统中的无线位移测量仪3、非接触式外部变形测量仪器4、降雨装置5、光照装置7、冲击荷载施压装置8等也可采用独立的安装架进行安装,即分别在箱体1外围分别搭建用于安装非接触式外部变形测量仪器4、降雨装置5、光照装置7、冲击荷载施压装置8等的机架,然后分别对无线位移测量仪3、非接触式外部变形测量仪器4、降雨装置5、光照装置7、冲击荷载施压装置8等分别通过机架进行安装。
81.在本实施方式中还提供了一种用于测量边坡失稳的试验方法,具体包括:
82.试验前的准备工作,准备工作具体如下:
83.箱体1的安装:将箱体1放置在安装底座911上,松动限位块10上的锁紧螺钉 13,通过t型滑槽11与插接块12的配合,使限位块10沿t型滑槽11滑动,并逐渐靠近箱体1,当限位块10抵紧箱体1外壁时,拧紧锁紧螺钉13,螺钉的下端抵紧在t型滑槽11槽底上,使限位块10与安装底座911锁紧固定;通过多个限位块10 共同对箱体1外壁抵紧,使箱体1被固定在安装底座911上。
84.边坡模型2的安装:采用多个纵向等宽的坡体在箱体1内共同拼凑而成边坡模型2,并使相邻两个坡体之间采用软膜分隔。
85.无线位移测量仪3的预埋:在边坡模型2拼凑的同时,在边坡模型2的中分层放置无线位移传感器。
86.当需要对边坡模型2在地震下的土体运动特征和运动状态进行分析时,启动发动机906,发动机906驱动主动齿轮907转动,通过主动齿轮907与差速器908输入端的啮合,使差速器908转动,差速器908在转动时,带动转轴905转动,使转轴905上的凸轮909和驱动齿轮910同步转动,凸轮909在转动的同时,当凸轮909 的凸起部逐渐靠近震动底座902时,凸轮909将震动底座902逐渐顶起,使震动底座902向上运动,从而使安装底座911、箱体1均被顶起,随着凸轮909的继续转动,凸轮909的凸起部逐渐远离震动底座902,震动底座902、安装底座911和箱体 1则通过自身的重力自动向下运动,使震动底座902、安装底座911和箱体1实现上下震动,从而使安装在箱体1内的边坡模型2实现上下震动。
87.而在驱动齿轮910转动的同时,随着驱动齿轮910的转动,驱动齿轮910拨动拨块913,使拨块913沿通槽912移动,拨块913在移动的同时带动安装底座911 在震动底座902上前进,安装底座911在前进时,导向块914沿导向杆915滑动,复位弹簧917被压缩,当拨块913在带动安装底座911前进的过程中,不仅拨块913 失去与驱动齿轮910的啮合,使拨块913与驱动齿轮910在水平方向具有一定间距,且由于凸轮909对震动底座902的顶起,使拨块913与驱动齿轮910在垂直方向也具有一定间距,从而使拨块913失去驱动齿轮910的作用力,此时复位弹簧917通过自身的弹力推动安装底座911复位,使安装底座911在震动底座902上实现往复运动,安装底座911在左右往复运动的同时,箱体1随安装底座911同步进行往复运动,从而使安装在箱体1内的边坡模型2实现水平往复运动。
88.通过边坡模型2水平往复运动和上下震动共同配合,从而模拟出边坡模型2受到地震横波和地震纵波。在此过程中,非接触式外部变形测量仪器4实时对边坡模型2进行图像采集,无线位移测量仪3对边坡模型2的变形位移数据进行采集,激光转速仪14对转轴905的转速进行采集,最后,将采集的图像、变形位移数据、转轴905转速传输给分析处理系统,通过分析处理,从而得出地震下边坡变形过程中土体运动特征和运动状态。
89.当需要对边坡模型2在降雨和暴晒下的土体运动特征和运动状态进行分析时,打开对应降雨量的降雨喷头502,启动水泵,将水箱内的水抽送至导流管501内,进入到导流管501内的水通过降雨喷头502均匀的喷洒在边坡模型2上,当降雨足够后,水泵停止动作,降雨喷头502停止喷水,停止对边坡模型2的降雨。打开排水口6,将箱体1内边坡模型2未吸收的水分通过排水口6排出,并通过排水管路排放至水箱内。打开光照装置7,光照装置7中的两个光源共同对边坡模型2两侧进行照射,照射的同时,边坡模型2中的水逐渐被蒸发,边坡模型2逐渐产生裂缝。在此过程中,非接触式外部变形测量仪器4实时对边坡模型2进行图像采集,无线位移测量仪3对边坡模型2的变形位移数据进行采集,流量计对导流管501内水的流速进行采集,最后,将采集的图像、变形位移数据、水的流速传输给分析处理系统,通过分析处理,从而得出降雨和暴晒下边坡变形过程中土体运动特征和运动状态。在对边坡模型2在降雨和暴晒下的土体运动特征和运动状态进行分析时,当需要模拟雨滴较大的降雨时,可打开孔径较大的降雨喷头502,当需要模拟雨滴较小的降雨时,可打开孔径较小的降雨喷头502;同理,当模拟雨滴较大的强降雨时,打开孔径较大的降雨喷头502,并增大导流管501的流速;当模拟雨滴较大的弱降雨时,打开孔径较大的降雨喷头502,并降低导流管501的流速;当模拟雨滴较小的强降雨时,打开孔径较小的降雨喷头502,并增大导流管501的流速;当模拟雨滴较小的弱降雨时,打开孔径较小的降雨喷头502,并降低导流管501的流速。
90.当需要对边坡模型2在开挖卸荷下的土体运动特征和运动状态进行分析时,剪断
吊设冲击锤803的悬吊绳,冲击锤803通过自重向下掉落在边坡模型2上,并沿边坡模型2进行滚动,边坡模型2中的坡体发生相对滑动。在此过程中,非接触式外部变形测量仪器4实时对边坡模型2进行图像采集,无线位移测量仪3对边坡模型2的变形位移数据进行采集,最后,将采集的图像、变形位移数据传输给分析处理系统,通过分析处理,从而得出开挖卸荷下下边坡变形过程中土体运动特征和运动状态。
91.在本发明中,当震动装置9在模拟地震环境时,震动装置9的激振力计算方式如下:
92.f=(m0+m1+m2+
……
)a。
93.式中:f—激振力(n);m0—振动装置9运动部分有效质量(kg);m1—震动底座902和安装底座911台面质量(kg);m2—试件(例如夹具、安装螺钉等)质量 (kg);m0+m1+m2+
……
为震动装置9上所有物体总重量(包括边坡模型等);a—试验加速度(m/s2)。
94.其中,a=ωv;其中,v—试验速度;ω是角速度。
95.其中,ω=2πf;其中,π—圆周率;f为试验频率。
96.其中,n2=z1/z2*n1;其中,n2—差速器908副齿轮(带动横向振动)转速;n1—差速器908主齿轮(发动机所带齿轮)转速;z1—差速器908主齿轮齿数;z2—差速器908副齿轮齿数。
97.同时,驱动装置9中的驱动齿轮910应力循环次数的计算公式为:
98.n1=60njlh
99.式中:n—转速;j—转一周驱动齿轮910与拨块913的啮合次数;lh—工作时间。
100.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1