快速三维构造解释方法与流程
本发明涉及勘探地球物理构造解释,特别是涉及到一种快速三维构造解释方法。
背景技术:
1、构造解释是开展地震、地质综合研究的基础,其解释精度的决定了后期储层、流体预测和井位部署等关键步骤的成功率,同时构造解释的周期是影响井位部署效率的关键因素。现有两种主流的构造解释方法:第一种为通过纵横测线的连续逐道解释,拼接出三维构造解释成果;另一种为针对同一层位选择不同的种子点开展三维解释层位的自动追踪,实现三维解释层位的高效解释。现阶段大面积油气积勘探和高精度油气开发三维解释,构造解释层位通常不会全区稳定分布,给三维构造解释造成了极大的困扰:第一,纵横测线逐道解释的方法每次仅针对单一地震剖面的构造解释,不能从全局中发现不同区域地震同相轴的不连续和差异,解释人员往往局限于局部的构造闭合最优解,而忽略了全局最优解,往往会产生‘横看成岭侧成峰’的解释悖论,产生“摁下葫芦起了瓢”的解释矛盾,极大的延长了解释周期;常规的三维构造解释方法,会根据连续交互确定的种子点位置自动追踪构造解释层位,其往往会产生构造解释层位的不闭合,而这种不闭合往往在同一个层位中体现,并不能定量的分析和确认,造成多个解释矛盾交叠到一起,无法有效的区分和判断。
2、在申请号:cn201910777505.1的中国专利申请中,涉及到一种地质构造的智能解释方法,涉及地震数据分析技术领域,包括:利用原始地震振幅数据的预先解释结果,通过对不同种类的构造赋值的方法生成标签数据体,作为卷积神经网络的训练集,构建卷积神经网络模型预测地质构造。考虑了层位及不同种类构造之间的相互关系,使构造处的层位解释更加清晰,对不同构造的地质解释更加精准。
3、在申请号:cn201410214969.9的中国专利申请中,涉及到一种三维地震解释中基于约束的批量拾取层位面的方法,利用通过人工拾取的或者通过其他方式拾取的上下两个层位面作为约束面,然后获取约束层位面提供的已知条件,结合将要拾取的中间层位面之间存在相互制约的关系,进行同步拾取约束层位面之间的所有层位面。该发明提供了一种新的增加约束信息的自动拾取多张层位面的方法,该方法结合给定上下约束层位面的信息,提供了对将要拾取的层位面的辅助信息。在经过滤波之后得到的样本点上进行种子地震道蔓延法来拾取层位面,可以提高精确度和时间效率。
4、在申请号:cn201310530344.9的中国专利申请中,涉及到一种地震地层体分析方法及装置,其中,该方法包括以下步骤:从地震数据中估算地震工区的多方位地层倾角;以地震工区中地质构造的中心部位处的一个共中心点为基准点,设置一个种子地震道,其中,所述种子地震道由按一定间隔排列的种子点组成;根据上述多方位地层倾角,以种子地震道上的每个种子点为基准点,采用倾角传播技术进行空间层位同时追踪,获得一组地震层位;以地震数据体的形式存储地震层位的层位信息来组成地震层位体。本发明实施例实现了从地震数据中提取高精度的地质构造特征,从而提高了构造解释的精度;实现了将传统二维和准三维的构造解释模式转变为真三维的构造解释模式,从而提高了层位解释的效率。
5、以上现有技术均与本发明有较大区别,未能解决我们想要解决的技术问题,为此我们发明了一种新的快速三维构造解释方法。
技术实现思路
1、本发明的目的是提供一种有效解决构造解释中的“反复调整”问题,提升了构造解释精度和效率的快速三维构造解释方法。
2、本发明的目的可通过如下技术措施来实现:快速三维构造解释方法,该快速三维构造解释方法包括:
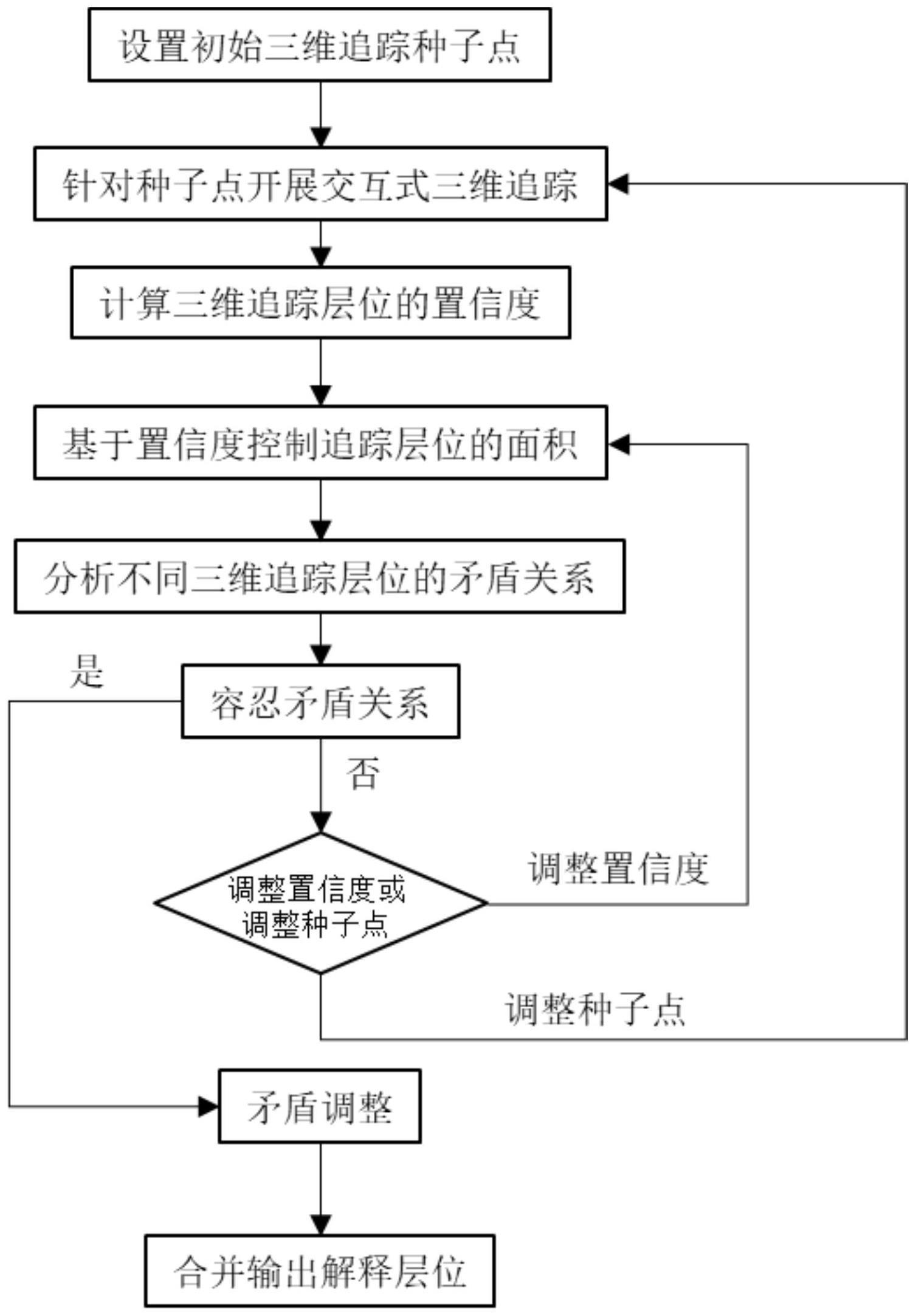
3、步骤1、在研究工区的不同位置设置三维自动追踪初始种子点;
4、步骤2、基于确定的种子点开展交互式三维追踪构造解释;
5、步骤3、计算各个追踪层位平面位置处的置信度;
6、步骤4、通过置信度阈值调整三维解释层位的自动追踪范围;
7、步骤5、计算不同三维追踪层位间的矛盾关系;
8、步骤6、如果步骤5中矛盾关系在允许误差范围内,则针对三维自动追踪层位开展矛盾调整;
9、步骤7、将调整后的三维解释层位合并,形成统一的解释层位。
10、本发明的目的还可通过如下技术措施来实现:
11、在步骤1中,选取的自动拾取初始种子点遵循如下原则:
12、(1)平面上,在工区的不同构造相对稳定位置选择种子点;
13、(2)纵向上,基于合成地震记录的指导,确定种子的深度。
14、在步骤2中,交互式三维追踪过程中,交互添加辅助种子点开展自动拾取,并基于地震波形的相似性开展三维自动追踪。
15、在步骤3中,层位追踪的置信度计算方法,通过计算其与其相邻种子点的波形相关系数确定。
16、在步骤5中,矛盾关系包含以下几种:
17、(1)三维追踪解释层位与井上地质分层点存在矛盾;
18、(2)多个解释层位间存在面积的交叠;
19、(3)多个解释层位存在面积空缺。
20、在步骤6中,如果步骤5中矛盾关系不在允许误差范围内,则针对矛盾问题调整对应层位的置信度阈值或添加调整种子点,如果通过调整对应层位的置信度阈值则流程回到步骤4,如果通过添加、调整种子点则流程回到步骤2。
21、在步骤6中,矛盾调整包括:
22、(1)针对解释层位的面积交叠区域通过层位加权平均实现;
23、(2)解释层位空白的区域,采用面积插值的方法;
24、(3)解释层位的面积交叠和空白通过手工解释实现。
25、在步骤7中,将矛盾调整后结果的合并输出为统一层位,在层位的平面位置标注出自动追踪区域、交叠区域、空白区域、井震不匹配数值,辅助后期质控分析。
26、本发明中的快速三维构造解释方法,本发明针纵横测线逐道解释的方法和常规三维构造解释中遇到诸多的问题,主要体现在两方面:第一,纵横测线逐道解释的方法每次仅针对单一地震剖面的构造解释,不能从全局中发现不同区域地震同相轴的不连续和差异,解释人员往往局限于局部的构造闭合最优解,而忽略了全局最优解,往往会产生‘横看成岭侧成峰’的解释悖论,产生“摁下葫芦起了瓢”的解释矛盾,极大的延长了解释周期;第二,常规的三维构造解释方法,会根据连续交互确定的种子点位置自动追踪构造解释层位,其往往会产生构造解释层位的不闭合,而这种不闭合往往在同一个层位中体现,并不能定量的分析和确认,造成多个解释矛盾交叠到一起,无法有效的区分和判断。该专利针对上述问题,通过追踪多个独立的构造解释层面,分析其之间的矛盾关系,形成针对性的解释方案,有效解决构造解释中的“反复调整”问题,只要体现在以下几个方面:(1)采用分块三维追踪解释的方式,首先三维解释可以有规避常规“逐剖面”解释产生的地震闭合难题,提高构造解释的效率,同时通过“分块”的方式,可以实现小范围的“分区闭合”;(2)在三维追踪的过程中保留“追踪置信度”的参数,可以有效提高三维分析的能力;(3)通过多个“三维解释”块的逐步拼合,可以有效控制构造解释的不闭合矛盾。该专利技术通过三维追踪提高构造解释的效率,通过分块拼接,控制构造解释的矛盾,提高构造解释的效率。
- 还没有人留言评论。精彩留言会获得点赞!