顾及信号间偏差稳定性的多频多模GNSS精密定位方法和设备
顾及信号间偏差稳定性的多频多模gnss精密定位方法和设备
技术领域
1.本发明涉及一种顾及信号间偏差稳定性的多频多模gnss精密定位方法和设备,主要应用于恶劣环境下的多频多模gnss精密单点定位。
背景技术:
2.随着gps,glonass系统的现代化建设、北斗三号卫星导航系统(bds-3)的全面开通以及galileo星座的加速部署,能够提供公开定位服务信号的全球卫星导航系统(gnss)越来越多,各大系统均能在3~6个频率上提供公开服务信号。例如,现代化的gps、glonass卫星以及所有bds-2卫星均可播发三频观测信号,galileo卫星可播发五频观测信号,bds-3卫星可播发六频观测信号。可用系统的增多和可用信号数量的提升使得多频率、多系统融合定位成为gnss重要的发展方向。在gnss提供的众多服务中,精密单点定位(ppp)因其算法简单、全天候、单站即可完成等优点而广泛应用于形变监测、环境监测和高精度导航定位领域。融合使用多系统、多频率的观测数据可以显著增加可见卫星数和可用观测值,获得更好的卫星几何分布图形,其ppp定位精度、可用性和可靠性均优于传统的gps单系统ppp。
3.然而,进行多频多模gnss精密定位时必须考虑不同信号间的兼容问题。例如,同一系统播发的不同频率卫星信号在接收机端的伪距硬件延迟互不相同;不同gnss系统的时间基并不一致,各系统的卫星信号在接收机端的硬件延迟也不相同。为抵消系统内不同频率信号的不一致,通常采用在各系统第三及以上频率的伪距观测方程中引入频率间偏差(ifb)参数的方法进行补偿。而对于系统间信号的差异,通常选定gps作为参考系统,并在其他系统的观测方程中引入该系统与gps间的系统间偏差(isb)参数,用isb参数吸收上述偏差。两方法简单有效,但由于引入了其他未知参数,观测值的冗余度会有所降低。在山区、森林、城市峡谷等观测条件恶劣、可见卫星有限、观测值过少的环境下,多频多模ppp的可靠性和精度将严重下降。
技术实现要素:
4.针对在观测条件恶劣环境下的可见卫星数量有限导致多频多模gnss定位性能下降的问题,本发明提出一种顾及信号间偏差稳定性的多频多模gnss精密定位方法和设备,通过虚拟观测方程对各类信号间偏差进行合理约束,达到提升恶劣环境下ppp定位性能、拓宽gnss精密定位的应用环境的目的。
5.为实现上述技术目的,本发明采用如下技术方案:
6.顾及信号间偏差稳定性的多频多模gnss精密定位方法,包括:
7.步骤1,获取接收机良好环境下的多频多模gnss观测数据;
8.步骤2,采用顾及各信号间偏差的观测方程进行多频多模精密单点定位(ppp),得到各历元中信号间偏差参数估值;
9.步骤3,利用信号间偏差的短时稳定性,对其收敛后的结果取平均,获得良好观测环境各信号间偏差下的平均值并存储;
10.步骤4,当观测环境变差时,将各信号间偏差的平均值作为虚拟观测值,用于恶劣环境下该接收机进行多频多模精密单点定位。
11.进一步地,所述步骤2顾及的信号间偏差,包括系统间偏差isb和频率间偏差ifb。
12.进一步地,所述步骤2在进行多频多模精密单点定位时,使用来自gps、glonass、galileo、bds-2和bds-3这些系统所有频率的伪距和相位观测值。
13.进一步地,步骤2选择gps作为参考系统,多频多模精密单点定位的方法为:
14.(1)建立顾及信号间偏差的观测方程:
[0015][0016]
式中,上标g、r、e、c2和c3分别代表gps、glonass、galileo、bds-2和bds-3卫星,上标s表示该系统第s颗卫星,下标f表示第f频率,为分别表示第s颗sys系统卫星第f频率的伪距观测值和相位观测值,μ为视线方向的单位向量,x为接收机三维坐标,cdtr为吸收了接收机端gps伪距硬件延迟的接收机钟差参数,isb
r,g
、isb
e,g
、isb
c2,g
和isb
c3,g
分别代表glonass与gps,galileo与gps,bds-2与gps,bds-3与gps间的isb参数;表示各系统第一频率的倾斜电离层延迟,吸收了接收机端伪距硬件延迟;γf为电离层转换系数,λf为第f频率信号的波长;m为对流层投影函数,z为接收机天顶方向对流层延迟;ifbf为第f频率的ifb参数,仅在各系统第三及以上频率的伪距观测方程中出现;nf为第f频率相位观测值的整周模糊度,吸收了卫星端与接收机端相位硬件延迟;
[0017]
(2)将上述观测方程中的观测值、方程系数和待估参数使用矩阵表示,并简化为如下形式:
[0018]
l=bu+δ
[0019]
式中,l为观测矩阵,b为设计矩阵,δ为测量噪声矩阵,u为未知参数估值矩阵:
[0020]
u=[x,cdtr,t,ι,isb,ifb,n]
t
[0021]
式中,ι表示所有卫星第一频率的电离层延迟构成的矩阵,isb表示所有isb参数构成的矩阵,ifb表示所有ifb参数构成的矩阵,n表示所有整周模糊度参数构成的矩阵;
[0022]
(3)建立状态方程:
[0023]uk+1
=uk+ωk[0024]
式中,u
k+1
、uk分为第k+1和第k历元的未知参数估值矩阵,ωk为系统噪声矩阵;
[0025]
(4)根据建立的观测方程和状态方程,采用扩展卡尔曼滤波逐历元解算各未知参数估值矩阵。
[0026]
进一步地,步骤3中收敛的判定标准为,东、北和高程方向上定位精度连续十个历元优于0.1m。
[0027]
进一步地,步骤3计算良好环境下各信号间偏差平均值的方法为:
[0028][0029]
式中,表示除gps系统外的其他sys系统与gps系统间isb的平均值,为sys系统第f频率ifb参数的平均值,n为收敛后的历元总数,为第j历元isb、ifb参数的估值;
[0030]
进一步地,步骤4将各信号间偏差参数的平均值作为虚拟观测值,用于恶劣环境下ppp解算的方法为:
[0031]
(1)在已有观测方程的基础上,基于各信号间偏差参数的平均值添加下列虚拟观测值:
[0032][0033]
(2)采用扩展卡尔曼滤波逐历元解算各未知参数。
[0034]
一种顾及信号间偏差稳定性的多频多模gnss精密定位设备,包括存储器及处理器,所述存储器中存储有计算机程序,其特征在于,所述计算机程序被所述处理器执行时,使得所述处理器实现上述任一项所述的顾及信号间偏差稳定性的多频多模gnss精密定位方法。
[0035]
本发明的有益效果是:本发明充分考虑了信号间偏差变化稳定的特性,通过虚拟观测方程对各类信号间偏差进行约束,可以有效提高观测条件恶劣环境下的多频多模gnss精密单点定位的精度、可靠性和收敛时间。
附图说明
[0036]
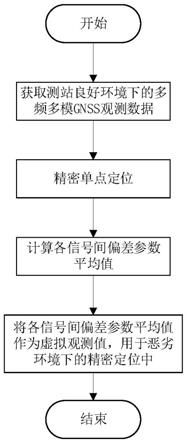
图1为本发明实施方法流程图;
[0037]
图2为2021年3月15日sgoc测站isb估值序列(截止高度角为10
°
);
[0038]
图3为2021年3月15日sgoc测站ifb估值序列(截止高度角为10
°
);
[0039]
图4为2021年3月16日sgoc测站在两种信号间偏差处理策略下的四系统全频率动态精密单点定位误差序列(截止高度角为30
°
);
[0040]
表1为2021年3月16日sgoc测站在两种信号间偏差处理策略下前1小时与全部24小时的定位误差rms统计值(截止高度角为30
°
)。
具体实施方式
[0041]
下面对本发明的实施例作详细说明,本实施例以本发明的技术方案为依据开展,给出了详细的实施方式和具体的操作过程,对本发明的技术方案作进一步解释说明。
[0042]
本发明提供一种顾及信号间偏差稳定性的多频多模gnss精密定位方法,参考图1所示,包括以下步骤:
[0043]
步骤1,获取接收机良好环境下的多频多模gnss观测数据。
[0044]
步骤1获取的观测数据要求至少包含两个以上gnss系统至少三个以上频率的观测数据(本实施例以gps、glonass、galileo、bds(包括bds-2和bds-3)所有四个系统全部频率的观测数据为例,并将gps作为参考系统以对本发明进行解释说明。在其他实施例中可以是任意两个或两个以上系统,只要确定好参考系统,即可按与本实施例相同的方法求解其他系统相对于参考系统的系统间偏差,以作为虚拟观测值引入多频多模gnss精密单点定位观测方程中)。
[0045]
步骤2,采用顾及各信号间偏差的观测方程进行多频多模精密单点定位(ppp),得到各历元中信号间偏差参数估值;
[0046]
信号间偏差包括了系统间偏差(isb)和频率间偏差(ifb)。在添加信号间偏差参数时,由于gps卫星最多播发三频信号,故gps系统观测方程中仅包含1个ifb参数。与gps类似,bds-2、glonass也仅播发三频信号,故二者分别包含1个ifb参数,以及1个与gps间的isb参数。galileo、bds-3分别可播发五频、六频信号,故二者分别包含3个、4个ifb参数以及1个isb参数。综上所述,在采用四系统全频率ppp时,观测方程中最多可包括4个isb以及10个ifb参数。在将这些信号间偏差加入观测方程后,具体的定位方法为:
[0047]
(1)卫星的原始观测方程是非线性的,在实际解算时需要在待估参数近似值处进行线性化。在引入了各类信号间偏差参数后并线性化后,观测方程可表示为:
[0048][0049]
式中,上标g、r、e、c2和c3分别代表gps、glonass、galileo、bds-2和bds-3卫星,上标s表示该系统第s颗卫星,下标f表示第f频率,为分别表示第s颗sys系统卫星第f频率的伪距观测值和相位观测值,μ为视线方向的单位向量,x为接收机三维坐标,cdtr为吸收了接收机端gps伪距硬件延迟的接收机钟差参数,isb
r,g
、isb
e,g
、isb
c2,g
和isb
c3,g
分别代表glonass与gps,galileo与gps,bds-2与gps,bds-3与gps间的isb参数;i1表示各系统第一频率的倾斜电离层延迟(吸收了接收机端伪距硬件延迟),γf为电离层转换系数,
λf为第f频率信号的波长,m为对流层投影函数,z为接收机天顶方向对流层延迟,ifbf为第f频率的ifb参数(该参数仅在各系统第三及以上频率的伪距观测方程中出现),nf为第f频率相位观测值的整周模糊度(吸收了卫星端与接收机端相位硬件延迟)。
[0050]
(2)将上述观测方程中的观测值、方程系数和待估参数使用矩阵表示,并简化为如下形式:
[0051]
l=bu+δ
[0052]
式中,l为观测矩阵,b为设计矩阵,δ为测量噪声矩阵,u为未知参数估值矩阵,包括:
[0053]
u=[x,cdtr,t,ι,isb,ifb,n]
t
[0054]
式中,ι表示所有卫星第一频率的电离层延迟,isb表示所有isb参数,ifb表示所有ifb参数,n表示所有模糊度参数。
[0055]
(3)建立状态方程:
[0056]uk+1
=uk+ωk[0057]
式中,u
k+1
、uk分为第k+1和第k历元的未知参数估值矩阵,ωk为系统噪声矩阵。
[0058]
(4)根据建立的观测方程和状态方程,采用扩展卡尔曼滤波逐历元解算各未知参数。
[0059]
步骤3,利用信号间偏差的短时稳定性,对其收敛后的结果取平均,获得良好观测环境下各参数的平均值并存储;
[0060]
步骤2通过卡尔曼滤波可以获得任意历元中待估参数的高精度估值,但滤波需要一定时间才能收敛至最优,而收敛之前的结果往往不可靠。为得到各信号间偏差的最优估值,故步骤3对其收敛后的结果取平均。收敛的判定标准为,东、北和高程方向上定位精度连续十个历元优于0.1m。在获得收敛后的所有结果后,步骤3计算各信号间偏差参数平均值的方法为:
[0061][0062]
式中,表示除gps系统外的其他sys系统与gps系统间isb的平均值,为sys系统第f频率ifb参数的平均值,n为收敛后的历元总数,为第j历元isb、ifb参数的估值;
[0063]
步骤4,当观测环境变差时,将各信号间偏差参数的平均值作为虚拟观测值,用于恶劣环境下该接收机的精密定位中。
[0064]
在恶劣观测环境下,由于可见卫星数减少、观测质量变差,观测值的冗余度和质量会大大降低,从而导致接收机精密定位的结果变差甚至不可靠。本发明考虑到各类信号间偏差变化稳定的特性,通过虚拟观测方程对各类信号间偏差进行约束,对处于恶劣观测环境下的接收机进行多频多模gnss精密定位,有效提高了恶劣观测环境下ppp的定位精度和可靠性。
[0065]
具体的,加入虚拟观测方程后,多频多模gnss精密定位方法为:
[0066]
(1)在已有观测方程的基础上,基于各信号间偏差参数的平均值添加下列虚拟观测值:
[0067][0068]
(2)采用扩展卡尔曼滤波逐历元解算包括接收机坐标在内的各未知参数。
[0069]
实施例1
[0070]
本实例对isb的稳定性进行了说明。
[0071]
图2展示了2021年3月15日sgoc测站isb估值序列。为模拟良好观测环境,将截止高度角设为10
°
。从图中能够看出,四类isb参数在良好观测环境下的估值非常稳定。待滤波收敛后,各isb参数的估值在一天内的变化小于0.5ns,故用平均值描述isb是合理的。
[0072]
实施例2
[0073]
本实例对ifb的稳定性进行了说明。
[0074]
图3展示了2021年3月15日sgoc测站10种ifb估值序列。为模拟良好观测环境,将截止高度角设为10
°
。从图中能够看出,在良好观测环境下,10种ifb估值也非常稳定。待滤波收敛后,gps、glonass、galileo以及bds-2的ifb参数的估值在一天内的变化小于0.5ns,bds-3的几类ifb参数变化则小于1ns,故用平均值描述ifb也是合理的。
[0075]
实施例3
[0076]
本实例对加入信号间偏差构成的虚拟方程后,多频多模gnss在恶劣环境下的精密定位精度的改善情况进行了说明。
[0077]
为模拟恶劣观测环境,将截止高度角设为30
°
。图4展示了2021年3月16日sgoc测站在两种信号间偏差处理策略下的四系统全频率动态精密单点定位前1个小时的误差序列。表1则统计了2021年3月16日sgoc测站在两种信号间偏差处理策略下前1小时与全部24小时的定位误差rms。与不添加虚拟观测方程相比,添加虚拟观测方程后东、北、高程和三维方向前一小时的定位精度均有显著提升,分别约提升35.4%、17.9%、30.7%和27.6%,且收敛时间明显缩短。24小时所有历元的定位误差rms统计结果显示,添加虚拟观测方程后东、北、高程和三维方向定位精度可分别改善33.3%、17.5%、16.4%和20.3%。
[0078]
表1
[0079][0080][0081]
实施例1、实施例2共同验证了isb和ifb等信号间偏差参数的稳定性,实施例3证明了添加由信号间偏差构成的虚拟观测方程后可以显著改善恶劣观测环境下多频多模gnss精密定位的精度、可靠性与收敛时间。
[0082]
以上实施例为本技术的优选实施例,本领域的普通技术人员还可以在此基础上变换观测模型或进行各种改进,在不脱离本技术总的构思的前提下,这些变换或改进都应当属于本技术要求保护的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1