应用于缺陷高度测量的方法及装置与流程
1.本发明涉及检测技术领域,尤其涉及一种应用于缺陷高度测量的方法及装置。
背景技术:
2.在生产过程中,若产品中出现超出预期标准的缺陷时,则会导致产品性能异常,故在生产加工过程中,对产品上的缺陷进行检测是非常重要的一个环节。产品的缺陷包括出现在产品上的凸点及落尘等具有高度的瑕疵,凸点及落尘等缺陷的高度值对于产品性能的影响非常大,故对于凸点及落尘等缺陷的高度的检测是必不可少的一个环节。
3.现有技术中针对制程上的缺陷的高度量测,一般使用价格昂贵的白光干涉仪或3d相机去取得缺陷的3d图来计算缺陷的高度,这种检测方式对于机台稳定需求要很高,并非一般的半导体量测机台皆可安装,且由于白光干涉仪体积过大需要更大的空间才可安装,适应性较差,并且,白光干涉仪和3d摄像机操作困难,学习不容易,甚至对于多层次的工艺制程,量测上可能会有问题发生。
技术实现要素:
4.本发明的目的是客服了上述现有技术的缺点,提供了一种成本低、适应性好、检测精度高、效率高、便于操作的应用于缺陷高度测量的方法及装置。
5.为了实现上述目的,本发明的应用于缺陷高度测量的方法及装置如下:该应用于缺陷高度测量的方法,其主要特征是,包括:步骤1:将相机对准待检测缺陷;步骤2:带动所述相机沿垂直于所述待检测缺陷的方向单向移动,并控制所述相机每移动系统预设间隔距离就进行一次拍摄,以拍摄到的各张图片中的各相邻像素点之间灰度差值的绝对值的总和与所述相机的位移距离为依据,获取所述待检测缺陷的高度h;其中,所述图片中的各相邻像素点之间灰度差值的绝对值的总和为:所述图片中所有行中相邻像素点之间的灰度差值的绝对值的总和与所述图片中所有列中相邻像素点之间的灰度差值的绝对值的总和之和。
6.上述的一种应用于缺陷高度测量的方法,其中,所述步骤2包括:步骤a21:带动所述相机沿垂直于所述待检测缺陷的方向单向移动,所述相机每移动系统预设间隔距离就进行一次拍摄,获取所述相机拍摄到初始有效图片的位置,其中,所述初始有效图片为所述相机在移动过程中拍摄到的第一张各相邻像素点之间灰度差值的绝对值的总和达到系统预设的最低阈值的图片;步骤a22:继续带动所述相机沿垂直于所述待检测缺陷的方向单向移动所述系统预设间隔距离;步骤a23:所述相机执行拍摄操作,生成当前有效图片;步骤a24:判断所述当前有效图片中的各相邻像素点之间灰度差值的绝对值的总和是否小于所述相机拍摄的前一张有效图片中的各相邻像素点之间灰度差值的绝对值的
总和;步骤a25:若所述当前有效图片中的各相邻像素点之间灰度差值的绝对值的总和未小于所述前一张有效图片中的各相邻像素点之间灰度差值的绝对值的总和,则返回上述步骤a22;若所述当前有效图片中的各相邻像素点之间灰度差值的绝对值的总和小于所述前一张有效图片中的各相邻像素点之间灰度差值的绝对值的总和,则继续后续步骤a26;步骤a26:将所述当前有效图片的前一张有效图片作为最大灰度差值总和图片;步骤a27:获取所述相机拍摄到所述最大灰度差值总和图片的位置;步骤a28:根据下式1获取所述待检测缺陷的高度h:h=2
×dꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式1;其中,d为所述相机拍摄到初始有效图片的位置到所述相机拍摄到所述最大灰度差值总和图片的位置的位移距离。
7.上述的一种应用于缺陷高度测量的方法,其中,所述步骤a21包括:步骤a211:将所述相机移动到系统预设的起始位置;步骤a212:带动所述相机沿垂直于所述待检测缺陷的方向单向移动所述系统预设间隔距离;步骤a213:所述相机执行拍摄操作,生成当前拍摄图片;步骤a214:对所述当前拍摄图片进行分析,判断所述当前拍摄图片中的各相邻像素点之间灰度差值的绝对值的总和是否达到所述系统预设的最低阈值;步骤a215:若所述当前拍摄图片中的各相邻像素点之间灰度差值的绝对值的总和未达到所述系统预设的最低阈值,则返回上述步骤a211;若所述当前拍摄图片中的各相邻像素点之间灰度差值的绝对值的总和达到所述系统预设的最低阈值,则将所述当前拍摄图片作为所述初始有效图片,并继续后续步骤a22。
8.上述的一种应用于缺陷高度测量的方法,其中,所述步骤2包括:步骤b21:带动所述相机沿垂直于所述待检测缺陷的方向单向移动,所述相机每移动系统预设间隔距离就进行一次拍摄,获取所述相机拍摄到初始有效图片的位置和所述相机拍摄到最后有效图片的位置;其中,所述初始有效图片为所述相机在移动过程中拍摄到的第一张各相邻像素点之间灰度差值的绝对值的总和达到系统预设的最低阈值的图片;所述最后有效图片为所述相机在移动过程中拍摄到的最后一张各相邻像素点之间灰度差值的绝对值的总和达到系统预设的最低阈值的图片;步骤b22:根据所述相机拍摄到初始有效图片的位置到所述相机拍摄到最后有效图片的位置的位移距离得到所述待检测缺陷的高度h。
9.上述的一种应用于缺陷高度测量的方法,其中,所述步骤2之前还包括以下步骤:步骤0:根据接收到的预估准待检测缺陷的高度范围,将所述相机的拍摄镜头切换为与所述预估准待检测缺陷对应的景深的镜头。
10.该应用于缺陷高度测量的装置,其主要特征是,包括相机;位移机构,用于固定所述相机,并带动所述相机移动;总控模块,分别与所述相机和所述位移机构连接,并执行如下操作:
步骤1:控制所述位移机构带动所述相机移动,令所述相机对准待检测缺陷;步骤2:控制所述位移机构带动所述相机沿垂直于所述待检测缺陷的方向单向移动,并控制所述相机每移动系统预设间隔距离就进行一次拍摄,所述总控模块以拍摄到的各张图片中的各相邻像素点之间灰度差值的绝对值的总和与所述相机的位移距离为依据,获取所述待检测缺陷的高度h;其中,所述图片中的各相邻像素点之间灰度差值的绝对值的总和为:所述图片中所有行中相邻像素点之间的灰度差值的绝对值的总和与所述图片中所有列中相邻像素点之间的灰度差值的绝对值的总和之和。
11.上述的一种应用于缺陷高度测量的装置,其中,所述装置在执行所述步骤2的操作时,进行以下处理:步骤a21:所述总控模块控制所述位移机构带动所述相机沿垂直于所述待检测缺陷的方向单向移动,并控制所述相机每移动系统预设间隔距离就进行一次拍摄,所述总控模块获取所述相机拍摄到初始有效图片的位置,其中,所述初始有效图片为所述相机在移动过程中拍摄到的第一张各相邻像素点之间灰度差值的绝对值的总和达到系统预设的最低阈值的图片;步骤a22:所述总控模块控制所述位移机构继续带动所述相机沿垂直于所述待检测缺陷的方向单向移动所述系统预设间隔距离;步骤a23:所述总控模块控制所述相机执行拍摄操作,生成当前有效图片;步骤a24:所述总控模块判断所述当前有效图片中的各相邻像素点之间灰度差值的绝对值的总和是否小于所述相机拍摄的前一张有效图片中的各相邻像素点之间灰度差值的绝对值的总和;步骤a25:若所述当前有效图片中的各相邻像素点之间灰度差值的绝对值的总和未小于所述前一张有效图片中的各相邻像素点之间灰度差值的绝对值的总和,则返回上述步骤a22;若所述当前有效图片中的各相邻像素点之间灰度差值的绝对值的总和小于所述前一张有效图片中的各相邻像素点之间灰度差值的绝对值的总和,则继续后续步骤a26;步骤a26:将所述当前有效图片的前一张有效图片作为最大灰度差值总和图片;步骤a27:所述总控模块获取所述相机拍摄到所述最大灰度差值总和图片的位置;步骤a28:所述总控模块根据下式1获取所述待检测缺陷的高度h:h=2
×dꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式1;其中,d为所述相机拍摄到初始有效图片的位置到所述相机拍摄到所述最大灰度差值总和图片的位置的位移距离。
12.上述的一种应用于缺陷高度测量的装置,其中,所述装置还包括对焦部件,所述对焦部件与所述总控模块相连接,所述装置在执行所述步骤a21的操作时,进行以下处理:步骤a211:所述对焦部件对所述待检测缺陷进行检测,所述总控模块根据对焦部件的检测结果确定系统预设的起始位置,所述总控模块控制所述位移机构带动所述相机移动到所述系统预设的起始位置;步骤a212:所述总控模块控制所述位移机构带动所述相机沿垂直于所述待检测缺陷的方向单向移动所述系统预设间隔距离;步骤a213:所述总控模块控制所述相机执行拍摄操作,生成当前拍摄图片;
步骤a214:所述总控模块对所述当前拍摄图片进行分析,判断所述当前拍摄图片中的各相邻像素点之间灰度差值的绝对值的总和是否达到所述系统预设的最低阈值;步骤a215:若所述当前拍摄图片中的各相邻像素点之间灰度差值的绝对值的总和未达到所述系统预设的最低阈值,则返回上述步骤a211;若所述当前拍摄图片中的各相邻像素点之间灰度差值的绝对值的总和达到所述系统预设的最低阈值,则将所述当前拍摄图片作为所述初始有效图片,并继续后续步骤a22。
13.上述的一种应用于缺陷高度测量的装置,其中,所述装置在执行所述步骤2的操作时,进行以下处理:步骤b21:所述总控模块控制位移机构带动所述相机沿垂直于所述待检测缺陷的方向单向移动,所述相机每移动系统预设间隔距离就进行一次拍摄,获取所述相机拍摄到初始有效图片的位置和所述相机拍摄到最后有效图片的位置;其中,所述初始有效图片为所述相机在移动过程中拍摄到的第一张各相邻像素点之间灰度差值的绝对值的总和达到系统预设的最低阈值的图片;所述最后有效图片为所述相机在移动过程中拍摄到的最后一张各相邻像素点之间灰度差值的绝对值的总和达到系统预设的最低阈值的图片;步骤b22:所述总控模块根据所述相机拍摄到初始有效图片的位置到所述相机拍摄到最后有效图片的位置的位移距离得到所述待检测缺陷的高度h。
14.上述的一种应用于缺陷高度测量的装置,其中,所述相机包括多个镜头,所述装置在执行所述步骤2的操作前,还执行以下操作:所述总控模块根据接收到的预估准待检测缺陷的高度范围,控制所述相机进行镜头切换,将所述相机的拍摄镜头切换为与所述预估准待检测缺陷对应的景深的镜头。
15.本发明的应用于缺陷高度测量的方法及装置的有益效果:通过根据相机在移动过程中拍摄到的图片中的各相邻像素点之间灰度差值的绝对值的总和与所述相机的位移距离为依据,获取所述待检测缺陷的高度,可实现采用普通相机也可对缺陷高度进行检测。本发明的应用于缺陷高度测量的方法及装置,利用拍摄到的缺陷的照片的灰度差值的差异与相机的移动距离来获得缺陷高度,可有效降低检测成本,提高适应性,且保障了检测的精度及检测的效率,有效控制产品的质量。
附图说明
16.以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
17.图1为一实施例中本发明的应用于缺陷高度测量的方法的流程图。
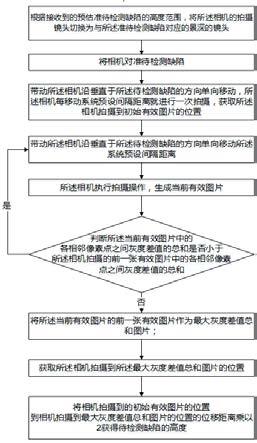
18.图2为另一实施例中本发明的应用于缺陷高度测量的方法的流程图。
19.图3为一图像区域的像素的灰度值示意图。
20.图4为拍摄动作分析图。
21.图5为影像分析示意图。
具体实施方式
22.为了使发明实现的技术手段、创造特征、达成目的和功效易于明白了解,下结合具
体图示,进一步阐述本发明。但本发明不仅限于以下实施的案例。
23.须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。
24.如图1所示,一实施例中的应用于缺陷高度测量的方法,包括:步骤0:根据接收到的预估准待检测缺陷的高度范围,将所述相机的拍摄镜头切换为与所述预估准待检测缺陷对应的景深的镜头;其中,预估准待检测缺陷的高度范围可由用户输入至系统,因为要测的落尘的大小不一定,而不同的镜头有不同的分辨率、视野和景深、 景深会影响量测的精度,高倍率景深很浅,适合用来量测需高精度的量测条件,举个例而言,50x景深只有0.49um,所以相机在z轴带动下移动,要以每次行程只有0.49um的距离来进行移动,这样测出的落尘高度会更精确,故在拍摄前,将拍摄镜头切换为与所述预估准待检测缺陷对应的景深的镜头可有效保障检测精度,同时保障检测效率。
25.步骤1:将相机对准待检测缺陷,该步骤可由操作人员输入待检测缺陷的坐标,调节相机的平面位置,实现对焦;步骤2:带动所述相机沿垂直于所述待检测缺陷的方向单向移动,并控制所述相机每移动系统预设间隔距离就进行一次拍摄,以拍摄到的各张图片中的各相邻像素点之间灰度差值的绝对值的总和与所述相机的位移距离为依据,获取所述待检测缺陷的高度h;其中,所述图片中的各相邻像素点之间灰度差值的绝对值的总和为:所述图片中所有行中相邻像素点之间的灰度差值的绝对值的总和与所述图片中所有列中相邻像素点之间的灰度差值的绝对值的总和之和;所述步骤2包括:步骤a21:带动所述相机沿垂直于所述待检测缺陷的方向单向移动,所述相机每移动系统预设间隔距离就进行一次拍摄,获取所述相机拍摄到初始有效图片的位置,其中,所述初始有效图片为所述相机在移动过程中拍摄到的第一张各相邻像素点之间灰度差值的绝对值的总和达到系统预设的最低阈值的图片,该步骤具体包括:步骤a211:将所述相机移动到系统预设的起始位置,该系统预设的起始位置为操作人员预估缺陷的高度范围后,调节到的低于缺陷的位置,通过该步骤的设置提高检测的效率;步骤a212:带动所述相机沿垂直于所述待检测缺陷的方向单向移动所述系统预设间隔距离;步骤a213:所述相机执行拍摄操作,生成当前拍摄图片;步骤a214:对所述当前拍摄图片进行分析,判断所述当前拍摄图片中的各相邻像素点之间灰度差值的绝对值的总和是否达到所述系统预设的最低阈值;步骤a215:若所述当前拍摄图片中的各相邻像素点之间灰度差值的绝对值的总和未达到所述系统预设的最低阈值,则返回上述步骤a211;若所述当前拍摄图片中的各相邻像素点之间灰度差值的绝对值的总和达到所述系统预设的最低阈值,则将所述当前拍摄图
片作为所述初始有效图片,并继续后续步骤a22;步骤a22:继续带动所述相机沿垂直于所述待检测缺陷的方向单向移动所述系统预设间隔距离;步骤a23:所述相机执行拍摄操作,生成当前有效图片;步骤a24:判断所述当前有效图片中的各相邻像素点之间灰度差值的绝对值的总和是否小于所述相机拍摄的前一张有效图片中的各相邻像素点之间灰度差值的绝对值的总和;步骤a25:若所述当前有效图片中的各相邻像素点之间灰度差值的绝对值的总和未小于所述前一张有效图片中的各相邻像素点之间灰度差值的绝对值的总和,则返回上述步骤a22;若所述当前有效图片中的各相邻像素点之间灰度差值的绝对值的总和小于所述前一张有效图片中的各相邻像素点之间灰度差值的绝对值的总和,则继续后续步骤a26;步骤a26:将所述当前有效图片的前一张有效图片作为最大灰度差值总和图片;步骤a27:获取所述相机拍摄到所述最大灰度差值总和图片的位置;步骤a28:根据下式1获取所述待检测缺陷的高度h:h=2
×dꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式1;其中,d为所述相机拍摄到初始有效图片的位置到所述相机拍摄到所述最大灰度差值总和图片的位置的位移距离。
26.如图2所示,在另一实施例中,应用于缺陷高度测量的方法,包括:步骤0:根据接收到的预估准待检测缺陷的高度范围,将所述相机的拍摄镜头切换为与所述准待检测缺陷对应的景深的镜头;步骤1:将相机对准待检测缺陷;步骤b21:带动所述相机沿垂直于所述待检测缺陷的方向单向移动,所述相机每移动系统预设间隔距离就进行一次拍摄,获取所述相机拍摄到初始有效图片的位置和所述相机拍摄到最后有效图片的位置;其中,所述初始有效图片为所述相机在移动过程中拍摄到的第一张各相邻像素点之间灰度差值的绝对值的总和达到系统预设的最低阈值的图片;所述最后有效图片为所述相机在移动过程中拍摄到的最后一张各相邻像素点之间灰度差值的绝对值的总和达到系统预设的最低阈值的图片;步骤b22:根据所述相机拍摄到初始有效图片的位置到所述相机拍摄到最后有效图片的位置的位移距离得到所述待检测缺陷的高度h。
27.在一实施例中,可通过应用于缺陷高度测量的装置对缺陷高度进行检测,该装置包括:相机,包括多个镜头,不同镜头会有不同的景深、分辨率和视野;位移机构,用于固定所述相机,并带动所述相机移动;总控模块,分别与所述相机和所述位移机构连接;对焦部件,所述对焦部件与所述总控模块相连接;该对焦部件可由镭射装置构成,其可检测缺陷的所处位置。
28.该装置执行如下操作:步骤0:所述总控模块根据接收到的预估准待检测缺陷的高度范围,控制所述相机
进行镜头切换,将所述相机的拍摄镜头切换为与所述准待检测缺陷对应的景深的镜头;其中,可由鼻轮是用来切换镜头。
29.步骤1:控制所述位移机构带动所述相机移动,令所述相机对准待检测缺陷;步骤2:控制所述位移机构带动所述相机沿垂直于所述待检测缺陷的方向单向移动,并控制所述相机每移动系统预设间隔距离就进行一次拍摄,所述总控模块以拍摄到的各张图片中的各相邻像素点之间灰度差值的绝对值的总和与所述相机的位移距离为依据,获取所述待检测缺陷的高度h;其中,所述图片中的各相邻像素点之间灰度差值的绝对值的总和为:所述图片中所有行中相邻像素点之间的灰度差值的绝对值的总和与所述图片中所有列中相邻像素点之间的灰度差值的绝对值的总和之和,在执行该操作时,具体进行以下处理:步骤a21:所述总控模块控制所述位移机构带动所述相机沿垂直于所述待检测缺陷的方向单向移动,并控制所述相机每移动系统预设间隔距离就进行一次拍摄,所述总控模块获取所述相机拍摄到初始有效图片的位置,其中,所述初始有效图片为所述相机在移动过程中拍摄到的第一张各相邻像素点之间灰度差值的绝对值的总和达到系统预设的最低阈值的图片,执行该步骤时,具体包括以下操作:步骤a211:所述对焦部件对所述待检测缺陷进行检测,所述总控模块根据对焦部件的检测结果确定系统预设的起始位置,所述总控模块控制所述位移机构带动所述相机移动到所述系统预设的起始位置;步骤a212:所述总控模块控制所述位移机构带动所述相机沿垂直于所述待检测缺陷的方向单向移动所述系统预设间隔距离;步骤a213:所述总控模块控制所述相机执行拍摄操作,生成当前拍摄图片;步骤a214:所述总控模块对所述当前拍摄图片进行分析,判断所述当前拍摄图片中的各相邻像素点之间灰度差值的绝对值的总和是否达到所述系统预设的最低阈值;步骤a215:若所述当前拍摄图片中的各相邻像素点之间灰度差值的绝对值的总和未达到所述系统预设的最低阈值,则返回上述步骤a211;若所述当前拍摄图片中的各相邻像素点之间灰度差值的绝对值的总和达到所述系统预设的最低阈值,则将所述当前拍摄图片作为所述初始有效图片,并继续后续步骤a22;;步骤a22:所述总控模块控制所述位移机构继续带动所述相机沿垂直于所述待检测缺陷的方向单向移动所述系统预设间隔距离;步骤a23:所述总控模块控制所述相机执行拍摄操作,生成当前有效图片;步骤a24:所述总控模块判断所述当前有效图片中的各相邻像素点之间灰度差值的绝对值的总和是否小于所述相机拍摄的前一张有效图片中的各相邻像素点之间灰度差值的绝对值的总和;步骤a25:若所述当前有效图片中的各相邻像素点之间灰度差值的绝对值的总和未小于所述前一张有效图片中的各相邻像素点之间灰度差值的绝对值的总和,则返回上述步骤a22;若所述当前有效图片中的各相邻像素点之间灰度差值的绝对值的总和小于所述前一张有效图片中的各相邻像素点之间灰度差值的绝对值的总和,则继续后续步骤a26;步骤a26:将所述当前有效图片的前一张有效图片作为最大灰度差值总和图片;步骤a27:所述总控模块获取所述相机拍摄到所述最大灰度差值总和图片的位置;
步骤a28:所述总控模块根据下式1获取所述待检测缺陷的高度h:h=2
×dꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式1;其中,d为所述相机拍摄到初始有效图片的位置到所述相机拍摄到所述最大灰度差值总和图片的位置的位移距离。
30.在具体实施上述方式时,可由对焦部件找到待检测缺陷的位置,然后根据对焦部件找到的待检测缺陷的位置再下调预设的距离确定系统预设的起始位置。通过该步骤可更快的找到待检测缺陷的位置,并保障相机可拍摄到缺陷的初始有效图片,保障检测的精准性和效率;为了保障本领域技术人员可更好地理解确定系统预设的起始位置的方式,下面举一实例进行说明:镭射部件可先找到待检测缺陷的位置,然后总控模块根据预估准待检测缺陷的高度范围,将相机下调到镭射部件找到的待检测缺陷的位置下方与预估准待检测缺陷的高度范围匹配的位置,该位置即为系统预设的起始位置。例如,预估准待检测缺陷的高度为1微米,那么可将镭射部件找到待检测缺陷的位置下方0.5微米或更大的距离间隔位置定为系统预设的起始位置。
31.在其他实施例中,也可直接通过人工设置系统预设的起始位置。
32.在另一实施例中,所述装置在执行所述步骤2的操作时,也可进行以下处理:步骤b21:所述总控模块控制位移机构带动所述相机沿垂直于所述待检测缺陷的方向单向移动,所述相机每移动系统预设间隔距离就进行一次拍摄,获取所述相机拍摄到初始有效图片的位置和所述相机拍摄到最后有效图片的位置;其中,所述初始有效图片为所述相机在移动过程中拍摄到的第一张各相邻像素点之间灰度差值的绝对值的总和达到系统预设的最低阈值的图片;所述最后有效图片为所述相机在移动过程中拍摄到的最后一张各相邻像素点之间灰度差值的绝对值的总和达到系统预设的最低阈值的图片;步骤b22:所述总控模块根据所述相机拍摄到初始有效图片的位置到所述相机拍摄到最后有效图片的位置的位移距离得到所述待检测缺陷的高度h。
33.下面对本方案的原理进行进一步的说明:一般像素的灰度值是由0到254来表现颜色的明暗度,两个像素的灰度差是指:两个相邻像素灰度值的差值的绝对值,而在设定图像范围内的总灰度差值是指该图像范围内所有相邻像素的灰度差的总和。在缺陷的不同位置拍摄的照片有不同的总灰度差值(即各张图片中各相邻像素点之间的灰度差值的绝对值的总和)。
34.在采用本发明的方法及装置的检测过程中,相机进行多次拍摄得到多张照片,然后总控模块对各张图片的总灰度差值进行计算。由于缺陷不同位置的照片会有不同的总灰度差值。当相机移动、拍摄的过程中,若拍到的照片未对焦于缺陷,则该照片的总灰度差值会低于系统预设的最低阈值,而当拍到的照片对焦于缺陷时,则该照片的总灰度差值会达到系统预设的最低阈值。在具体实施时,相机由下往上移动的过程中,由于相机的高度不同,故拍到的图片的总灰度差值会存在差异,拍到的图片的总灰度差值呈逐渐变大然后到达顶点后再逐渐变小。其中,拍摄到总灰度差值最大的图片(即最清楚的一张图片)的位置为对焦于缺陷(如落尘)中间高度的位置,拍摄到初始有效图片的位置为对焦于缺陷最低点的位置,拍摄到最后有效图片为对焦于缺陷最高点的位置。故本发明可根据计算得到的各
张图片的总灰度差值与相机的位移距离来检测缺陷的高度。
35.为使得本领域技术人员可更好的了解各张图片中的各相邻像素点之间灰度差值的绝对值的总和是什么,下面举一例子进行说明,图3为一图像区域的像素的灰度值示意图,其中,每一方格表示一像素,每一方格内的数字表示该像素的灰度值,其中:第一行的三个像素之间的灰度差的绝对值和为:|150-100|+|80-150 |=120;第二行的三个像素之间的灰度差的绝对值和为:|100
‑ꢀ
80|+|150-100 |=70;第三行的三个像素之间的灰度差的绝对值和为:|80
‑ꢀ
150|+|100-80 |=90;第一列的三个像素之间的灰度差的绝对值和为:|80-100 |+|150-80 |=90;第二列的三个像素之间的灰度差的绝对值和为:|100
‑ꢀ
150 |+|80-100 |=70;第三列的三个像素之间的灰度差的绝对值和为:|150-80|+|100-150 |=120;故图3所示区域的总灰度差值等于:120+70+90+90+70+120=560。
36.即总灰度差值等于所有行的像素之间的灰度差的绝对值和与所有列的像素之间的灰度差的绝对值和的总值,其中,;; x为横向看时各像素的灰度值,y为纵向看时各像素的灰度值;实际检测过程中,图像区域的范围与缺陷的尺寸对应。
37.图4为拍摄动作分析图,从图4可以看出,在执行上述实施例中的应用于缺陷高度测量的方法及装置时,每移动
△
z的距离就会进行一次取像(即拍摄),然后对拍到的图像进行传输并进行计算分析,然后由上至下工进行了5次取像然后获得5张图片,由上至下拍到的图片的总灰度差值分别为5600、10249、77777、6666和3000其中,拍摄到总灰度差值为77777的图像即为总灰度差值最大的图片,拍摄到该图片的位置为对焦于缺陷(如落尘)中间高度的位置。需注意的是此处仅为举例说明哪张图片为总灰度差值最大的图片,实际检测过程中拍照频率更高。
38.图5为影像分析示意图,其中,纵轴表示影像分析值(即总灰度差值),横轴表示相机沿垂直方向移动的位置,图5中的抛物线为从下至上拍摄到的所有图片的总灰度差值的变化状态的拟合曲线,从图中可以看出图片的总灰度差值呈由小变大再变小的状态,其中,a点为最大灰度差值总和图片的所在位置,再后面拍到的图片的影像分析值就会沿图中的箭头方向下降,此处的影像分析值衰减比例等于100000
÷
70000=0.7,具体的影像分析值衰减比例会根据实际情况有所偏差。其中,b点的位置为系统预设的最低阈值;若采用图1中的方法进行检测,那在检测到总灰度差值下降的图片就可确定已找到了最大灰度差值总和图片,此时就可停止拍摄,通过所述相机拍摄到初始有效图片的位置和所述相机拍摄到所述最大灰度差值总和图片的位置的间隔距离乘以2就可得到缺陷的高度,完成检测。
39.而采用图2中的方法进行检测,则需要令相机对整个行程的图片进行拍摄,然后,获取所述相机拍摄到初始有效图片的位置和所述相机拍摄到最后有效图片的位置的间隔距离就可得到缺陷的高度,完成检测。
40.其中,采用图1中的方法可对大部分缺陷的高度进行检测,其检测效率高,而采用
图2中的方法可对各种不同特点的缺陷的高度进行检测,其检测效率略低于图1中的方法,但检测的准确性更高。
41.在通过上述相机拍摄位置计算缺陷的高度时,可根据相机拍摄到两张所需的照片时经过的行程及各行程直接的距离得到拍摄两张所需的照片时的间隔距离,即可由下式2得到相机拍摄两张所需的照片时的间隔距离h:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式2;其中,为相机所在的行程数、n为相机拍摄两张所需的照片所移动的行程的总数,dz为各行程直接的间隔距离。可采用上式2计算得到所述相机拍摄到初始有效图片的位置到所述相机拍摄到所述最大灰度差值总和图片的位置的位移距离,及所述相机拍摄到初始有效图片的位置到所述相机拍摄到最后有效图片的位置的位移距离。
42.本发明中可采用ccd相机(即电荷耦合元件相机)等常规的面相机构成所述相机,通过这种现有技术中的常规相机搭配位移机构中的z向马达上下运动,让光学系统有很大质量改变。这种利用缺陷的图片的灰度值的差异和相机在z向马达带动下拍摄图片时所处位置的差异计算出缺陷的高度,通过常见和成本低廉的相机拍照系统便可取代大部分白光干涉仪和3d摄像机进行缺陷高度量测,藉以控制产品质量。该技术方案根据高速移动的相机的参数及获得的两维图像信息进行三维重建,然后根据三维空间信息計算出缺陷高度,该实施例中的装置可直接应用于现有的流水线上、甚至现有的一些流水线上本身就具备这些部件,仅需输入相关检测程序即可实现相应的功能,本发明中的应用于缺陷高度测量的方法及装置适应性好,可方便的对制程上的缺陷的高度进行量测。
43.通过本发明的应用于缺陷高度测量的方法及装置来量测缺陷高度的最小精度可在0.01um到0.1um以内,该精度取决于位移机构中z轴马达的精度。该装置可符合大部分的检测需求,量测单点缺陷高度所花费时间约10ms,该检测速度与采用白光干涉仪的检测速度相当,并小于3d摄像机的时间。
44.上述实施例中的应用于缺陷高度测量的方法及装置可应用于半导体领域,对晶圆上的缺陷的高度进行检测,确保缺陷不会对后续工艺产生影响。
45.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1