一种恒力弹簧支吊架服役状态无线监测与故障预警系统
1.本发明涉及一种支吊架监测与故障诊断系统,尤其涉及一种恒力弹簧支吊架服役状态无线监测与故障预警系统。
背景技术:
2.恒力弹簧支吊架是量大面广的热火发电、锅炉及水暖供热供汽供水、石油化工催化反应等生产过程中高温高压管道重要的长期服役的支撑设备。管道及其恒力弹簧支吊架往往处于高空等位置,对其人工巡检由于检验检测不便、检查不及时,人为主观等因素存在监测的实时性差、故障诊断准确性差等问题。一旦发生管道或者其恒力弹簧支吊架工作不正常,没有及时发现,高温高压管道产生变形或者附加应力,支吊架输出拉力及位移发生不正常变化,造成管道和支吊架的进一步损伤,将造成重大安全隐患,甚至引起重大工业安全事故,损失巨大。工业生产上迫切需要有工作可靠的恒力弹簧支吊架服役状态自动监测和故障预警系统。
3.目前恒力弹簧支吊架状态监测和故障诊断技术可以分为两类:
4.一类为对出厂前恒力弹簧支吊架状态检测测试,如中国发明专利(专利号:201821696791.6)中提出了一种恒力弹簧支吊架的调试及拉力的现场检测装置,通过设置两根拉力检测杆及拉力传感器,实时显示第一拉力检测杆组件及第二拉力检测杆组件的拉力信息以及两者之和。出厂前通过检测能够筛除恒力弹簧支吊架生产中存在的缺陷和不足,但其对于工业实际应用服役中恒力弹簧支吊架适用性差。
5.另一类为对恒力支吊架服役状态监测和故障诊断,如中国发明专利(专利号:201320107915.3)提出了一种可显示拉力与位移的恒力弹簧吊架,该装置顶部设有位移传感器,上拉力螺杆和下拉力螺杆之间设有荷载传感器,通过显示器分别显示当前位移和拉力,其对大量使用支吊架的场合适用性差,效率低,同时对服役状态自动故障诊断缺乏,需要人工按照经验判断;中国发明专利(专利号:201811257997.3)中提出了一种恒力弹簧支吊架弹簧状态监测方法,该装置在恒力弹簧中接入力传感器和位移传感器,以无线传输形式传输到后台处理平台,实时监控恒力弹簧运行状况。该装置同样并未对服役状态自动故障诊断,需要人工按照经验判断。
技术实现要素:
6.本发明的目的是为了解决以上现有技术的不足,提出了一种恒力弹簧支吊架服役状态无线监测与故障预警系统,其特征在于,信息获取处理部分,信息获取处理部包括设在恒力弹簧支吊架上的拉力传感器、位移传感器和传感器信号处理电路,包括数据采集传输部分和上位机,所述的数据采集传输部分包括协调器节点、汇聚节点、路由器节点和终端节点,所述的终端节点的输出端与汇聚节点相连,所述的汇聚节点的接收端与若干终端节点相连,汇聚节点的输出端与路由器节点相连,所述的路由器节点的接收端与汇聚节点相连,路由器节点的输出端与下级路由器节点和协调器节点相连,所述的协调器节点的接收端与
若干路由器节点相连,协调器节点的输出端与上位机相连,所述的终端节点、汇聚节点、路由器节点、协调器节点包括供电模块、微处理器模块、无线传输模块,所述的微处理器模块通过i/o接口与传感器连接,微处理器模块的输出端与无线传输模块相连,所述的上位机包括服役状态无线监测处理程序和故障预警处理程序。
7.更进一步的,数据采集传输设备基于zigbee技术的组建树状无线网络。
8.更进一步的,终端节点、汇聚节点、路由器节点、协调器节的微处理器和无线传输模块采用芯片cc2530。
9.更进一步的,服役状态无线监测处理程序基于labview的数据流编程,服役状态无线监测处理程序通过图形化在上位机的监测界面显示协调器节点输出的数据包,服役状态无线监测处理程序将数据包存储于数据库中。
10.更进一步的,故障预警处理程序包括设定设备预防性维修阈值为l
p
,设备的故障阈值为lf(0<l
p
<lf),传感器采集数据通过主成分分析法进行降维生成描述设备性能退化的退化量x(t),通过将退化量x(t)与设备预防性维修阈值为l
p
比较,从而确定恒力弹簧支吊架将服役状况,若x(t)≥l
p
,故障预警触发。
11.有益效果:
12.使用zigbee无线网络进行恒力弹簧支吊架服役状态的在线监测,可以实时获取数量众多的恒力弹簧支吊架服役状态信息;
13.依据恒力弹簧支吊架工作原理和工作特性,计算确定拉力阈值和位移阈值,根据拉力与位移的实时数据与阈值直接比较,实现对恒力弹簧支吊架服役状态故障预警诊断;
14.对读取的拉力与位移历史数据,采用主成分分析法进行传感器数据计算处理,将设备状态退化量与预防性维修阈值l
p
进行比较判断,实现对恒力弹簧支吊架服役状态故障预警,能够减小恒力弹簧支吊架故障带来的各项损失。
附图说明
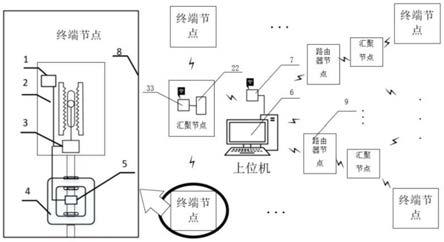
15.图1为恒力弹簧支吊架服役状态无线监测与故障预警系统结构示意图。
16.图2为传感器及电气箱安装示意图。
17.图3为恒力弹簧支吊架服役状态无线监测与故障预警系统工作原理图。
18.图4为无线网络结构示意图。
19.图5为终端节点数据传输流程图。
20.图6为路由器节点/汇聚节点数据传输流程图。
21.图7为协调器数据传输流程图。
22.图8为恒力弹簧支吊架服役状态故障预警诊断流程。
23.图中:1-电气箱;2-恒力弹簧支吊架面板;3-位移传感器;4-拉力传感器保护模块;5-拉力传感器;6-本地计算机;7-协调器节点;8-终端节点;9-路由器节点;22-电源模块;33-汇聚节点。
具体实施方式
24.为了加深对本发明的理解,下面将结合实施例和附图对本发明作进一步详述,该实施例仅用于解释本发明,并不构成对本发明保护范围的限定。
25.实施示例:
26.一种恒力弹簧支吊架服役状态无线监测与故障预警系统包括信息获取处理部分,数据采集传输部分和上位机,所述的信息获取处理部分,包括布置于恒力弹簧支吊架、拉力传感器、位移传感器、传感器信号处理电路,所述的拉力传感器设在恒力弹簧支吊架的顶板与恒力弹簧支吊架的上端拉杆之间,所述的位移传感器设在恒力弹簧支吊架的面板底端,位移传感器的移动端子设在指针轴上,所述的数据采集传输部分包括协调器节点、汇聚节点、路由器节点和终端节点,所述的终端节点与拉力传感器、位移传感器和信号处理电路通过电路相连,终端节通过无线方式与汇聚节点相连,所述的终端节点与信号处理电路设在电气箱内部,所述的电气箱设在恒力弹簧支吊架的面板侧面,所述的汇聚节点接收若干终端节点的数据包,汇聚节点输出至路由器节点,所述的路由器节点接收汇聚节点的数据包,路由器节点将数据包输出至下级路由器节点和协调器节点,所述的协调器节点接收若干路由器节点输出的数据包,协调器节点通过有线串口输出数据包至上位机,所述的终端节点、汇聚节点、路由器节点、协调器节点包括供电模块、微处理器模块、无线传输模块,其中微处理器模块通过i/o接口与传感器连接,微处理器模块接收传感器输出的数据,微处理器模块通过无线传输模块输出至无线网络,所述的上位机包括服役状态无线监测处理程序和故障预警处理程序。
27.如图1所示;
28.本发明的系统结构示意图,本发明的特征是:包括位移传感器3,拉力传感器5,包含信号调理电路的电气箱1,协调器节点7,终端节点8,汇聚节点33,路由器节点9;上位机6等。
29.如图2、3、4所示;
30.拉力传感器5安装在恒力弹簧支吊架2底板与恒力弹簧支吊架下端拉杆之间,位移传感器3固定在恒力弹簧支吊架面板2底端,位移传感器3移动端子固定于指针轴,系统中命令数据流先由本地计算机经过协调器节点、汇聚节点、路由器节点到达传感器节点,传感器数据由传感器节点、路由器节点、汇聚节点、协调器节点,再通过串口到达本地计算机,协调器节点、汇聚节点、路由器节点、传感器节点以的树状结构组成无线传感网络。
31.如图5、6、7所示,
32.终端节点与数据采集部分的传感器、信号处理电路通过电路连接,终端节点采集传感器传输的拉力、位移等信息数据,再通过无线方式发送至汇聚节点,汇聚节点33接收一定区域内的终端节点8无线信息数据,融合汇聚各个终端节点8的数据并将数据进行打包,发送至路由节点9,协调器节点7发起无线网络组网,路由器节点9加入网络,汇聚节点33通过与路由器节点9无线通信加入网络,终端节点8通过与汇聚节点33无线通信加入网络,从而形成如的树状无线网络,上位机6通过串口发送采集命令至所述协调器节点7,协调器节点7通过无线网络中的路由器节点、汇聚节点33将采集命令送至终端节点8,终端节点8收到采集命令,读取拉力传感器5和位移传感器3的数据,拉力传感器5和位移传感器3信号通过电气箱1内的信号处理电路至单片机i/o口,终端节点8无线模块对数据进行打包,并加入恒力弹簧支吊架的吊点号和自身的id,将整个数据包通过无线射频模块发送出去,路由节点9接收汇聚节点33数据包,将其数据包进行转发至下级路由器节点9或者协调器节点7,协调器节点7接收经过一级或多级路由节点9发送的数据包,协调器节点7通过串口与上位机相
连,进行数据包的传输,上位机6监控部分通过串口接收协调器节点上传的各组恒力弹簧支吊架工作状态数据,在上位机监测界面进行显示,上位机6监控部分基于labview的数据流编程,以图形的方式在上位机监测界面显示协调器节点上传的各组状态数据,上位机6包括对服役状态无线监测处理程序与故障预警处理程序两部分,依据采集的恒力弹簧支吊架服役工作状态数据,以及恒力弹簧支吊架服役工作特性,通过一定计算处理及判断处理,自动识别服役故障,并在上位机监测界面进行服役状态预警和预警显示输出,上位机6监测部分设置有故障判断模块以及预警模块,用于将故障状况及时准确通知相关人员,同时将所有传感器监测的数据存储于数据库中,上位机6监测部分设置有故障预警模块,用于将故障状况及时准确通知相关人员,同时将所有传感器监测的数据存储于数据库中。
33.在试验前期,通过采集恒力弹簧支吊架全生命周期的数据信息,数据进行处理,同时确定设备的故障阈值为lf。
34.如图8所示,
35.上位机故障预警处理程序包括设定设备预防性维修阈值为l
p
,设备的故障阈值为lf(0<l
p
<lf),将传感器采集数据通过主成分分析法进行降维生成描述设备性能退化的退化量x(t),通过将退化量x(t)与设备预防性维修阈值为l
p
比较,从而确定恒力弹簧支吊架将服役状况,若x(t)≥l
p
,需及时准确通知相关人员,进行预防性维修。
36.采用wiener过程建立部件的非单调退化模型。记部件在任意时刻t的性能退化量x(t)服从漂移系数为λ,扩散系数为σ的wiener过程,则
37.x(t)=λt+σb(t)
ꢀꢀꢀ
(15)
38.其中b(t)为标准布朗运动,b(t)~n(0,t),相关参数λ和σ可通过收集设备在离散时间点t1…
td的退化数据x(t1)
…
x(td)后使用极大似然估计法计算得出:
[0039][0040][0041]
式中,t0=0,x(t0)=0。
[0042]
假设l
p
已知,不同退化状态的设备退化量到预防性维修阈值l
p
的时间不同,设设备从全新状态首次到达l
p
的时间为t:
[0043]
t=inf{t:x(t)≥l
p
}
ꢀꢀꢀ
(18)
[0044]
进一步的,t服从逆高斯分布,具有解析解,其分布函数为:
[0045][0046]
式中,φ(x)为标准正态分布函数。
[0047]
对分布函数求导可得t的概率密度函数为:
[0048][0049]
由概率论的期望和方差计算公式可分别求得t的期望和方差分别为:
[0050][0051][0052]
若设备安装服役到某一时刻tk,经检测得设备在tk时的性能退化量x(tk)<l
p
,则从tk时刻到退化量第一次到达l
p
的剩余寿命si可表示为:
[0053]
si=inf{si:x(tk+si)≥l
p
}
ꢀꢀꢀ
(24)
[0054]
由于wiener过程是平稳独立增量的过程,故si同样服从逆高斯分布,同上述步骤一样可求得si的期望与方差分别为:
[0055][0056][0057]
进一步的,设t0为全新设备退化量首次到达l
p
的时间,则
[0058]
将带入到式(1)得:
[0059][0060]
l
p
虽然未知,但是为固定值,所以x(t0)的实际大小取决于根据正态分布的性质p(-2σ1≤x-μ1≤2σ1)=0.956,若满足
[0061][0062]
则x(t0)不超过lf的概率为97.8%,进行损坏后维修的概率仅为2.2%,由此推出l
p
的解析表达式
[0063][0064]
其中lf为设备失效退化量可通过重复试验或者专家系统得到。
[0065]
将通过主成分分析法所得的退化量与预防性维修阈值l
p
,进行比较判断,实现对恒力弹簧支吊架服役状态故障预警诊断。
[0066]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1