一种基于多通道探测的目标跟踪系统的制作方法
本发明涉及目标跟踪,尤其涉及一种基于多通道探测的目标跟踪系统。
背景技术:
1、在目标跟踪时,目标在图像中的旋转往往会导致目标跟踪丢失,现有的目标跟踪算法均无法满足此应用条件,对导引系统性能产生较大影响,现有技术急需研究改进。
技术实现思路
1、鉴于上述的分析,本发明旨在提供一种基于多通道探测的目标跟踪系统,用以解决现有技术中的跟踪方法容易丢失跟踪目标导致跟踪不稳定的问题。
2、本发明的目的主要是通过以下技术方案实现的:
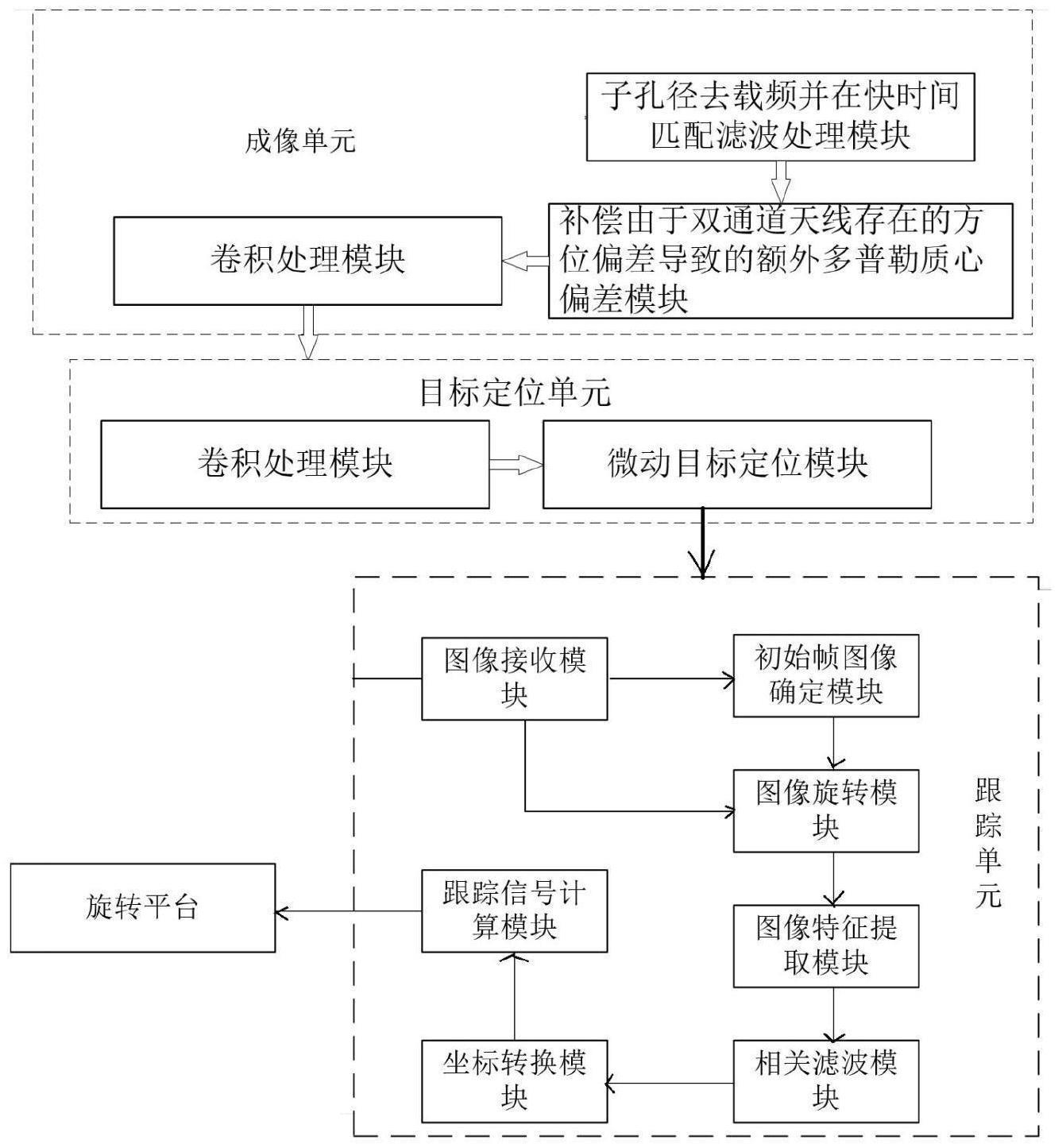
3、本发明提供了一种基于多通道探测的目标跟踪系统,包括依次电连接的成像单元、目标定位单元和目标跟踪单元;
4、成像单元包括子孔径去载频并在快时间匹配滤波处理模块、补偿由于双通道天线存在的方位偏差导致的额外多普勒质心偏差模块和卷积处理模块;
5、目标定位单元包括补偿模块和微动目标定位模块;
6、子孔径去载频并在快时间匹配滤波处理模块的数据输出端与补偿由于双通道天线存在的方位偏差导致的额外多普勒质心偏差模块连接,补偿由于双通道天线存在的方位偏差导致的额外多普勒质心偏差模块的数据输出端与卷积处理模块连接,卷积处理模块的数据输出端与补偿模块连接,补偿模块的数据输出端与微动目标定位模块连接;
7、目标跟踪单元从目标定位单元获取连续帧的图像,在确定出目标已捕获的初始帧图像后进入跟踪控制过程;
8、在跟踪控制过程中,将初始帧图像后获取的后续帧图像逐帧旋转消除与初始帧图像的旋转角;对于逐帧的旋转后图像逐一进行相关滤波检测出目标点坐标;并且,在逐一的相关滤波检测中,通过迭代更新相关滤波模型;将检测出的目标点坐标转换回旋转前的图像中,得到目标点在旋转前图像中的目标点坐标;并根据该目标点坐标,计算出旋转平台的视线角速度作为跟踪信号输出到旋转平台控制旋转平台的姿态。
9、进一步地,跟踪单元包括:
10、图像接收模块,用于从目标定位单元获取连续帧的图像;
11、初始帧图像确定模块,用于从连续帧的图像捕获目标,将完成目标捕获的图像帧作为跟踪的初始帧图像;
12、图像旋转模块,用于将初始帧图像后获取的后续帧图像进行旋转消除与初始帧图像的旋转角得到旋转后图像;
13、图像特征提取模块,用于对于初始帧图像以及旋转后图像进行特征提取得到特征矩阵;
14、相关滤波模块,用于对于逐帧的旋转后图像逐一进行相关滤波检测出目标点坐标;并且,在逐一的相关滤波检测中,通过迭代更新相关滤波模型;
15、坐标转换模块,用于将检测出的目标点坐标转换回旋转前的图像中,得到目标点在旋转前图像中的目标点坐标;
16、跟踪信号计算模块,用于根据逐一的旋转前图像中的目标点坐标,计算出旋转平台的视线角速度作为跟踪信号输出到旋转平台控制旋转平台的姿态。
17、进一步地,在图像旋转模块中,通过旋转消除图像的旋转角的计算过程为:
18、1)根据旋转平台的姿态数据,建立由世界坐标系中的点到成像坐标系中的点的变换矩阵t:
19、
20、式中,φ、θ、γ分别为成像航向角、俯仰角、滚动角;t-1为成像器坐标系到大地坐标系的变换矩阵:
21、2)对变换矩阵t求逆矩阵t-1得到成像器坐标系到大地坐标系的变换矩阵;
22、
23、3)得到图像旋转角ξ:
24、
25、进一步地,图像旋转模块中对旋转后图像进行双线性插值得到包括图像中各像素点灰度值的灰度图。
26、进一步地,微动目标定位模块中,提取两幅图像的相位,通过设置一定的门限相位,对干涉相位进行检测,将静止目标对消,然后将对消结果进行取模,得到微动目标能量。
27、进一步地,在子孔径去载频并在快时间匹配滤波处理模块中,子孔径去载频并在快时间匹配滤波处理,得到的回波信号为:
28、
29、
30、其中,分别代表中间孔径接收到的匀速转动型无源微动干扰回波的多普勒中心频率和调频率;λ为雷达发射信号波长;j为虚数;k为信号调频率;r0为雷达至目标的距离;r为目标旋转半径;r<<ro;ω为转速;为初始相位;da为双通道sar系统两天线相位中心间距;va为sar载机沿x轴正方向的飞行速度;b为信号带宽;tp为信号脉宽;c为光速;tr为快时间;ta为慢时间,jm(2kr)为第一类m阶贝塞尔函数,m为阶数;θ(ta)为变换角。
31、进一步地,在补偿由于双通道天线存在的方位偏差导致的额外多普勒质心偏差模块中,补偿由于双通道天线存在的方位偏差导致的额外多普勒质心偏差,补偿函数为:
32、
33、其中,j为虚数;k为信号调频率;r0为雷达至目标的距离;ta为飞行时间;da为双通道sar系统两天线相位中心间距;va为sar载机沿x轴正方向的飞行速度。
34、进一步地,在补偿由于双通道天线存在的方位偏差导致的额外多普勒质心偏差模块中,利用补偿函数c1(ta)直接乘以jp1以进行补偿,jp2不变,补偿后回波信号为:
35、
36、
37、其中,分别代表中间孔径接收到的匀速转动型无源微动干扰回波的多普勒中心频率和调频率;λ为雷达发射信号波长;j为虚数;k为信号调频率;r0为雷达至目标的距离;r为目标旋转半径;r<<ro;ω为转速;为初始相位;da为双通道sar系统两天线相位中心间距;va为sar载机沿x轴正方向的飞行速度;b为信号带宽;tp为信号脉宽;c为光速;tr为快时间;ta为慢时间,jm(2kr)为第一类m阶贝塞尔函数,m为阶数;θ(ta)为变换角。
38、进一步地,在卷积处理模块中,使用方位向参考函数分别与jp1和jp2进行卷积处理,卷积处理后得到成像结果:
39、
40、
41、其中,a3(tr,ta)为附加调制项;θ(ta)为变换角;λ为雷达发射信号波长;j为虚数;k为信号调频率;r0为雷达至目标的距离;r为目标旋转半径;r<<ro;ω为转速;为初始相位;da为双通道sar系统两天线相位中心间距;va为sar载机沿x轴正方向的飞行速度;b为信号带宽;tp为信号脉宽;c为光速;tr为快时间;ta为慢时间,jm(2kr)为第一类m阶贝塞尔函数,m为阶数;bd为回波信号的多普勒带宽,θ(ta)为变换角。
42、进一步地,在补偿模块中,利用补偿函数c12(ta)对两幅复图像进行插值和配准,补偿由于接收孔径方位位置偏差导致的相位误差,补偿函数c12(ta)为:
43、
44、其中,j为虚数单位,k为信号调频率;r0为雷达至目标的距离;ta为飞行时间;da为双通道sar系统两天线相位中心间距;va为sar载机沿x轴正方向的飞行速度。
45、与现有技术相比,本发明至少可实现如下有益效果之一:
46、(1)本发明能够利用不同天线回波多普勒频率的变化抵消静止目标,提取出动目标,利用两幅sar图像的相位差与干涉sar系统参数和目标运动参数的关系,得出目标运动参数信息。本发明方法简便,可操作性强,将sar对地面目标高分辨成像和微动目标检测功能相结合。在后续工程转化和实际应用中能够对高价值目标进行检测、定位和跟踪,为战场形势评估、指挥与控制提供有利信息,对侦察和战场感知具有十分重要的意义。
47、(2)本发明的提供的目标跟踪方法使用范围广,可普遍适用于旋转平台中的光电跟踪导引。
48、(3)算法计算复杂度低、实现实时性好,在常用的嵌入式硬件平台上即可满足实时计算要求。
49、本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书实施例以及附图中所特别指出的内容中来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!