一种绝对式六自由度光栅编码器
1.本发明涉及位姿测量技术领域,具体为一种绝对式六自由度光栅编码器。
背景技术:
2.合成孔径光学系统是对孔径的拓展,主要可用于大型望远镜和高能激光物理聚焦镜等。科学仪器望远镜是目前人类探索宇宙的重要手段之一,无论何种望远镜,比如射电望远镜、光学望远镜,其主要性能参数之一是分辨率,分辨率和其口径大小相关,但单块大面积望远镜镜面难以制作,目前主要采用的子镜拼装的方式,观测性能受限于其子镜的拼接精度,同时由于重力载荷、温度变化、湿度变化等环境因素的影响,安装完成的子镜间相对位姿会产生微小变化,这会直接导致主镜产生较大的面形误差。而另外一种则是高能激光的聚焦镜面,这种聚焦同样需要子镜的安装配合,尽可能的减少面型误差,才能保证能量的高度集中。目前的位姿测量方案对环境稳定性要求较高,长期使用且矫正下仍然出现面型误差,因此急需一种更稳定、更高精度的,能够对位姿进行绝对测量的设备。
3.随着望远镜的使用,误差累计将导致其性能大幅下降,例如南非大望远镜由于湿度影响造成观测性能下降,霍比埃伯利望远镜由于温度影响而产生的观测性能下降。在即将建成的大麦哲伦望远镜中,也对子镜位姿测量极为关注。由中国参与,多国合作研究的30m望远镜(thirtymetertelescope),其主镜由492块六边形子镜拼接而成,预计2027年完工后会成为世界首座极端巨大望远镜。2021年12月25日,耗资约100亿美元的詹姆斯韦伯太空望远镜从法属圭亚那库鲁航天中心发射升空,其寿命的限制之一也是子镜的姿态。而高能激光物理研究的聚焦过程往往也需要较长的工作时间,在此期间均要保持子镜镜面的位姿标准。因而,子镜的空间位姿检测需求十分急切,不仅在安装时需要检测绝对位姿,并且需要在后续使用过程中测量并反馈,从而调节子镜的位姿,进而主动控制子镜使主镜面形满足需求。如何对子镜位姿进行高精度测量,为实现子镜共焦和共相的调整提供依据,是用于天文观测的大口径光学系统研究的核心技术。
4.关于位姿测量有电磁式位移测量和光学位移测量,其中电磁式测量方法中,电容式传感器的精度可达纳米级别,由多个电容传感器组成的多自由度测量系统。目前已用于凯克和加纳利大型望远镜的子镜位姿的实时检测,其有较高的准确性和稳定性,但是由电容传感器组成的测量系统不仅复杂,并且对温度和湿度敏感,长期累积存在误差较大的问题。
技术实现要素:
5.本发明的目的在于提供一种在使用过程中能够减少误差的绝对式六自由度光栅编码器,以便实现合成孔径光学系统位姿的精准监控。
6.本发明提供了一种绝对式六自由度光栅编码器,包括光源模块、绝对式四自由度测量模块、绝对式二自由度测量模块;由所述光源模块产生的准直光束,经偏振分光棱镜产生第一准直光束l1和第二准直光束l2,所述第二准直光束l2首先通过复合光栅分光模块分
成光束l2-1、光束l2-2和光束l2-3,光束l2-1利用复合光栅二维光栅区域产生衍射光,所述衍射光经绝对式四自由度测量模块测量出复合光栅的θ
x
,θy,δθz及z方向绝对位姿,光束l2-2和光束l2-3分别通过x向掩膜版进入x参考码道,通过y向掩膜版进入y参考码道,所述x向掩膜版与x参考码道拥有同样的编码,y向掩膜版与y参考码道拥有同样的编码,在x参考码道与x向掩膜版、y参考码道与y向掩膜版对齐时产生负向脉冲,以此标记零位,光束l2-1通过复合光栅的光栅区域衍射产生的光束,与第一准直光束l1在二维参考光栅产生的光束产生干涉现象,并由绝对式二自由度测量模块接收,并解析x和y方向的相位变化进而得到位移增量信息,同时产生的脉冲信号,可对增量位移进行零位标定,得到其绝对位移。
7.优选地,所述绝对式四自由度测量模块包括三个四象限光电探测器。
8.优选地,所述衍射光包括x方向的
±
1级衍射光和零级光,三束光斑在四象限光电探测器上的位置变化,并解算θ
x
,θy,θz及z方向的绝对位姿。
9.优选地,所述绝对式二自由度测量模块包括二自由度增量信号测量模块和二自由度零位脉冲信号测量模块。
10.优选地,所述二自由度增量信号测量模块包括偏振分光棱镜,第二四分之一玻片,第二分光棱镜,第一棱镜准直单元,第一四分之一波片,第一分光棱镜,第二棱镜准直单元,二维参考光栅,以及增量信号的去直流模块。
11.优选地,所述去直流模块包括退偏振分光棱镜,第一偏振片,第三四分之一玻片,第二偏振片和光电探测器。
12.优选地,所述二自由度零位脉冲信号测量模块包括复合光栅分光模块,光电探测器。
13.优选地,所述二自由度零位脉冲信号测量模块将两束光l2-2和l2-3,分别通过x向掩膜版进入x参考码道,通过y向掩膜版进入y参考码道。
14.优选地,所述二自由度增量信号测量模块通过复合光栅的二维光栅区域产生的x
s+1
,x
s-1
,y
s+1
和y
s-1
光束,与二维参考光栅产生的x
r+1
,x
r-1
,y
r+1
和y
r-1
光束产生干涉现象,并由光电探测器进行接收,分别解析x和y方向的相位变化进而得到位移增量信息,同时产生的脉冲信号,可对增量位移进行零位标定,得到其绝对位移。
15.优选地,所述光源模块包括准直透镜和光阑。
16.本发明能够在六自由度,更稳定准确地测得子镜的绝对位姿,相比已知方案的优势是可测绝对位姿,结构简单,更稳定,鲁棒性更强。因为光栅编码器的测量精度主要取决于光栅的栅距,物理结构不易改变,因此鲁棒性更强。且相对于目前使用的电容位移传感器,鲁棒性更好,几乎不受环境温度,湿度等的大变化影响,且集成性较好,可实现绝对位姿的测量。
附图说明
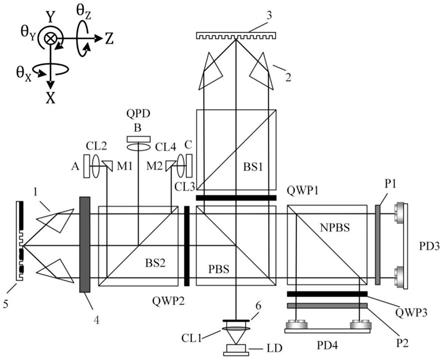
17.图1为本发明实施例提供的绝对式六自由度光栅编码器的平面结构示意图;
18.图2为本发明实施例提供的绝对式六自由度光栅编码器的立体结构示意图;
19.图3为本发明实施例提供的复合光栅主示图;
20.图4为本发明实施例提供的x向掩膜版示意图;
21.图5为本发明实施例提供的y向掩膜版示意图;
22.图6为本发明实施例提供的复合光栅分光模块的结构示意图;
23.图7为本发明实施例提供的装配现场测点示意图;
24.图8为本发明实施例提供的位姿调整光斑测点示意图;
25.图9为本发明实施例提供的光斑位置随位移变化的变化规律示意图;
26.图10为去直流光路模块示意图;
27.图11为脉冲信号的产生原理示意图;
28.图12为脉冲信号的产生形式示意图;
29.图13为绝对位置的检出示意图;
30.图14为增量信号被零位信号标记零点的示意图;
31.图15为相位协作定位提高脉冲定位精度的示意图;
32.图16为增量信号周期内相位与读数头位移之间的关系示意图;
33.图17为单点测量绝对式六自由度光栅编码器的立体结构示意图;
34.图18为单点测量复合集成光栅示意图;
35.图19为单点测量复合集成掩模示意图。
具体实施方式
36.下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
37.图1是根据本发明实施例提供的一种绝对式六自由度光栅编码器的结构示意图,包括光源模块10、绝对式四自由度测量模块20、绝对式二自由度测量模块30;由所述光源模块10产生的准直光束,并经偏振分光棱镜pbs产生第一准直光束l1和第二准直光束l2,所述第二准直光束l2首先进入复合光栅分光模块4产生光束l2-1、光束l2-2和光束l2-3,复合光栅分光模块4的结构示意图如图6所示,光束l2-1利用复合光栅5的二维光栅区域产生衍射光,衍射光经绝对式四自由度测量模块20测量出复合光栅5在θ
x
,θy,θz及z方向的绝对位姿,光束l2-2和光束l2-3分别通过x向掩膜版进入x参考码道,通过y向掩膜版进入y参考码道,所述x向掩膜版与x参考码道拥有同样的编码,y向掩膜版与y参考码道拥有同样的编码,在x参考码道与x向掩膜版、y参考码道与y向掩膜版对齐时产生负向脉冲,以此标记零位,通过复合光栅5产生的光束,与第一准直光束l1在二维参考光栅3产生的光束产生干涉现象,并由绝对式二自由度测量模块30接收,并解析x和y方向的相位变化进而得到位移增量信息,同时产生的脉冲信号,可对增量位移进行零位标定,得到其绝对位移。复合光栅分光模块4包含一组分光棱镜,可将光束第二准直光束l2输出分为光束l2-1、光束l2-2和光束l2-3。复合光栅5的二维光栅区域5-1、x向参考码道5-2、y向参考码道如图3所示、x向掩膜版如图4所示,y向掩膜版如图5所示。
38.光源模块10用于产生准直的光束,其包括光源ld、准直透镜cl1和光阑6。光源模块10产生准直的光束首先经过偏振分光棱镜pbs,得到光束l1和光束l2,光束l1照射在二维参考光栅3衍射产生四束衍射光,四束衍射光分别为光束x
r+1
,光束x
r-1
,光束y
r+1
和光束y
r-1
,光束l2通过复合光栅分光模块4等产生三束光,分别为光束l2-1,光束l2-2,光束l2-3。绝对式四自由度测量模块包括三个四象限光电探测器qpda/b/c,两个反射镜m1,m2,和三个聚焦透
镜cl1/2/3。光束l2-1照射在复合光栅的二维光栅区,产生五束衍射光,分别为x
s+1
,x
s-1
,y
s+1
,y
s-1
以及零级光。在进入绝对式二自由度测量模块前通过第二分光棱镜bs2分束x
s+1
,x
s-1
以及零级光,产生的光束设为x`
s+1
,x`
s-1
以及零级光,进入绝对式四自由度测量模块,通过解耦三个光斑在四象限光电探测器上位置的变化可得到θ
x
,θy,θz及z方向的绝对位姿。绝对式二自由度测量模块30包括二自由度零位脉冲信号测量模块和二自由度增量信号测量模块。二自由度零位脉冲信号测量模块包括偏振分光棱镜pbs,第二四分之一玻片qwp2,第二分光棱镜bs2,第一棱镜准直单元1,第一四分之一波片qwp1,第一分光棱镜bs1,第二棱镜准直单元2,二维参考光栅3,以及增量信号的去直流模块,去直流模块包括退偏振分光棱镜npbs,第一偏振片p1,第三四分之一玻片qwp3,第二偏振片p2和光电探测器pd3,pd4。如图2所示,第二准直光束l2通过复合光栅分光模块4产生另外两束光l2-2和l2-3,分别通过x向掩膜版进入x参考码道,通过y向掩膜版进入y参考码道。二自由度零位脉冲信号测量模块包括复合光栅分光模块bs3,bs4,bs5,bs6,光电探测器pd1,pd2。复合光栅5的二维光栅区域5-1产生的光束x
s+1
,光束x
s-1
,光束y
s+1
和光束y
s-1
,与二维参考光栅3产生的光束x
r+1
,光束x
r-1
,光束y
r+1
和光束y
r-1
在偏振分光棱镜pbs处产生干涉现象,并被光电探测器pd3和光电探测器pd4接收,分别解析x和y方向的相位变化进而得到位移增量信息。同时光电探测器pd1和光电探测器pd2探测得到的脉冲信号,可对增量位移进行零位标定,得到其绝对位置。
39.首先波长为660nm的激光从激光二极管中发出,经准直透镜cl1准直为平行激光,穿过一个孔径为2mm的光阑6,平行激光束被整形为直径为2mm的激光,此束激光首先经过一个偏振分光分光棱镜pbs,分成两束光,一束光被复合光栅分光模块4分光并转折最终穿过x向掩膜版和y向掩膜版,被光电探测器pd1和pd2所接收产生零位脉冲信号,另一束光首先进入增量位移测量模块,并且同时进入角度测量模块。
40.1、实际使用的情况为多块子镜拼接,此处以两块子镜拼接为例,可覆盖所有安装及使用时监测的情况。
41.(1)在装配现场将全部子镜拼接为完整的望远镜主镜面,并用波前传感器进行各块子镜的位姿调整,直至波前传感器获得不发生扭曲变形的完好的干涉图像。
42.(2)此时安装在望远镜支架处的读数头读取每块子镜的安位位姿并记录,例如,如图7所示,读数头记录子镜a和b的绝对位置信息为:xa,ya,za,rxa,rya,rza,xb,yb,zb,rxb,ryb,rzb。以此类推,计算出每一块子镜的绝对位姿。
43.2、使用现场
44.对每块子镜的粗略位姿调整好后,使用绝对式六自由度光栅编码器进行位姿监测,如图8所示,使得
[0045][0046]
调节好后固定读数头位置,再调整另一块需要拼接的子镜位姿,使得其读数头示数显示为:
[0047][0048]
此时可保证两块子镜相对位姿恢复到装配阶段位姿状态,继而完成其余子镜的安装。在使用期间对位姿进行监测,以供执行机构进行位姿调整。
[0049]
在望远镜工作阶段,如果子镜位姿由于重力,风载荷和温度等因素而发生位姿变化,绝对式六自由度读数头可以实时获得子镜位姿数据,主动控制器可根据反馈信息调节子镜位姿以恢复到装配阶段望远镜各块子镜的位姿状态。这样构成了一个闭环控制系统,即可在望远镜工作状态实时调节子镜位姿。
[0050]
绝对式四自由度测量模块的工作原理
[0051]
光斑的具体位置xa,ya,xb,yb,xc,yc根据后端光电流信息i进行计算获得,具体计算公式可表示为:
[0052][0053][0054]
其中k1和k2为比例系数,α=a,b,c。
[0055]
首先将光斑位置的坐标转化为原点坐标,即在未测量时,将其坐标系人为定义,可使所有衍射光位于坐标原点位置。图9为测量光栅发生指定位移时,光斑发生的位置变化。
[0056]
由以上的位置变化规律可推导在仅发生单自由度位姿变化时,绝对位姿变化与光斑位置的变化规律为:
[0057][0058]
式中的kz,k
θx
,k
θy
和k
θz
均为试验测定的待定参数,f为光电探测器前凸透镜焦距,l为光电探测器等效距离,为光电探测器等效距离,为光栅一级衍射角度。
[0059]
假设现有一光斑位置在三个四象限光电探测器qpda/b/c的位置分别为(x1.y1)(x0,y0),(x-1
,y-1
),由于零级光位置发生了变化,而零级光的位置变化只与δθ
x
,δθy有关,因此可直接推导出两者的值。
[0060][0061]
此时四象限光电探测器qpda和四象限光电探测器qpdc上光斑的位置应为:
[0062][0063]
同时由于不止存在这两个运动,另外的δz和δθz也会引起光斑移动,因此,可预测光斑的移动。
[0064]
首先是在δz的影响下,光斑的位置会在四象限光电探测器qpda和四象限光电探测器qpdc上发生变化,变化后的位移坐标为:
[0065][0066]
其次是在δθz的影响下,光斑的位置会在四象限光电探测器qpda和四象限光电探测器qpdc上发生变化,变化后的位移坐标为:δz=kzδxa[0067][0068][0069]
最终,光斑在四象限光电探测器qpda和四象限光电探测器qpdc的位置分别为:
[0070][0071][0072]
因此有方程:
[0073][0074]
简化后可得:
[0075][0076]
理论过程中,需一个零级衍射光和一组
±
1级衍射光即可完成测量。绝对式二自由度测量模块工作原理:
[0077]
1)二自由度增量信号测量模块
[0078]
光束经过偏振分光镜pbs时经过衍射光干涉可以得到两组0
°
和90
°
信号后,可以对信号进行处理。
[0079]
注意此时的z方向是通过增量位移模块测出,数据值为增量位移。在绝对式四自由度测量模块的协助下可转化为绝对位置坐标。
[0080]
2)二自由度零位脉冲信号测量模块
[0081]
二维参考光栅和增量光栅具有相同的光栅周期,因此当读数头沿x方向移动时光电探测器pd3和光电探测器pd4在重合光束处将干涉信号转化成电信号进行处理计算得到增量位移信息。经第二分光棱镜bs2出射的第二准直光束l2经过复合光栅分光模块4后,分束为光束l2-1,光束l2-2,光束l2-3分别照射到二维光栅区域5-1、x向参考码道5-2与y向参考码道5-3,光束l2-2和l2-3分别通过x向掩膜版和y向掩膜版并反射到光电探测器pd1和光电探测器pd2。x向掩膜版和y向掩膜版和对应的参考码道上设有相同编码的零位标记,当读数头移动时反射光强随之变化,读数头每次经过一个零位标记其中某个光电探测器便可以探测出一个相应的负脉冲零位信号,脉冲信号的产生原理和形式如图11和图12所示。
[0082]
经过复合光栅分光模组bs3,bs4,bs5,bs6可将光束l2-2和l2-3分别通过x向掩膜版和y向掩膜版射向x参考码道和y参考码道,并最终分别被光电探测器pd1和pd2接收。因此当x向掩膜版和y向掩膜版与复合光栅相对位移时在pd1和pd2处接收到的反射光信号一个负脉冲信号。
[0083]
例如当读数头沿复合光栅x方向移动经过两个零位标记后,可以根据增量信号和零位信号得到当前读数头的绝对位置。当读数头从o点开始移动,经过第一个零位标记后形成一个负脉冲信号,由脉冲信号确定参考点r1,当读数头经过第二个零位标记后零位负脉冲信号可以确定参考点r2,最后读数头继续运动至a处并停止。参考点r1和r2之间的距离为d1,参考点r2与参考点r3的距离为d2,并以此类推分别为d3,d4,d5,
……
。此时设d1,d2,d3等为距离编码,测量时增量信号模块可测出两个参考点之间的距离为s12,并与上述距离编码比对,则可知两个参考点并解算绝对坐标。例如若s12=d1,则可知此时经过的两个参考点分别为r1和r2,便可以得到参考点r1与参考点r2的绝对位置p1和p2。增量信号可以算出任意相邻零位参考点之间的增量位移,零位信号与参考信号为同时采样,根据零位信号确定的参考点r1与r2可以算出r1到r2对应增量信号的位移,以此对照编码距离确定绝对位置。当r1和r2的绝对位置确定后根据几何位置关系可以算出读数头的当前位置pa,见图13。
[0084]
pa=p
ii
+s
23
ꢀꢀꢀ
(9)
[0085]
零位脉冲定位精度范围内继续以相位协作进行定位,是一种粗精结合的定位方式,具体如图14和图15所示。即首先在脉冲定位范围内,因只能拟合脉冲峰,所以脉冲尖端点的位置在这个范围内随拟合程度而变化,无法保证精度。因此借助增量信号的相位协助,在每个不同的脉冲定位精度范围内,对应于增量信号中一段0.5μm相位中的某个确定的相位,即零位真值点,此后不需要进行拟合寻找脉冲尖端点,以此真值点进行绝对定位分析,避免了噪声及数据波动引起的误差,其定位精度和光栅尺增量信号的细分精度直接相关。
[0086]
根据光栅尺增量位移解算理论,当光栅尺沿x方向位移时,增量信号相位与位移具有如下一一对应关系:
[0087][0088]
其中ω
x
为增量信号的相位,ω
x0
为增量信号初始相位,δx为x方向增量位移,g为测量光栅的栅距。
[0089]
当位移一定时,增量信号的相位位移如图16所示,可将增量信号周期内的这一位置(相位)标记为零位脉冲的位置,当每次得到一个零位脉冲信号时,只需要找到其对应的增量信号周期内所标记的位置即可,从而可以大大提高的零位信号的定位精度,其定位精度和光栅尺增量信号的细分精度直接相关。
[0090]
单点测量绝对式六自由度光栅编码器立体结构示意图,如图17所示,单点测量复合集成光栅6如图18所示,单点测量复合集成掩模7如图19所示。复合光栅的x和y向参考码道和二维光栅区域集成在一起,优点是单一测点就可以产生所需要的五束衍射光,避免了阿贝误差。保证了光栅衍射光的干涉效果的同时,可利用在光栅区域的参考编码进行绝对定位,形成单测点的绝对式六自由度光栅编码器。
[0091]
在测量光栅移动的过程中可采用图像分析的办法,分析测量光栅相对于掩模版的位置。判断过程为分别提取掩膜版与测量光栅的图像编码,并进行实时位置比对,两者之间的重合程度及方向随位置而发生变化,从而得到x和y方向的绝对坐标。
[0092]
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1