一种小型加速度计的制作方法
1.本技术属于加速度测量技术领域,特别涉及一种小型加速度计。
背景技术:
2.石英挠性加速度计是惯性系统中的关键元件,石英挠性加速度计由于精度高、可靠性高、功率小等特点,广泛适用于惯导、航姿、平台稳定、导弹舵机和钻井控制等较高精度的系统,随着武器装备小型化发展,许多领域都对加速度计提出了更高的要求,不仅要求石英挠性加速度计精度高、功耗小、启动快、可靠性高,而且还要求石英挠性加速度计体积小、重量轻、环境适应能力强、精准测温;
3.现有技术中石英挠性加速度计虽然精度高、启动快,但其体积及质量大,系统标定补偿加速度计的温度系数参数由放置于加速度计外部的温度传感器提供,不能精确反映产品的内部温度,限制其在小型化武器装备中的应用;因此需要研制一种小型石英挠性加速度计:体积小、重量轻、抗振动、冲击能力强、稳定性、重复性高,功率小、启动快、环境适应性强、能够精确测温。
技术实现要素:
4.本发明的目的在于克服现有技术的缺陷,提供一种伺服电路板、温度传感器、力矩器定子组件ⅰ、力矩器定子ⅱ、摆动组件和壳体;
5.所述壳体有圆柱状内腔,内腔一端密封,内腔另一端敞开形成开口,所述力矩器定子组件ⅰ、摆动组件和力矩器定子ⅱ依次设置在内腔内,并与内腔底侧面贴合固定;
6.所述伺服电路板位于所述开口处,与壳体密封连接;
7.所述温度传感器设置在所述力矩器定子组件ⅰ远离壳体(6)密封端的一端端面上,
8.所述力矩器定子组件ⅰ包括第一力矩器定子、磁钢组件,所述力矩器定子组件ⅰ为单力矩器结构,
9.所述摆动组件包括顺次粘结骨架组件、摆架、配重环,
10.所述骨架组件为环形骨架,所述环形骨架外侧设有环形槽,所述环形槽上均匀缠绕有线圈,其底部对称设置有椭圆槽,所述环形骨架底部朝向所述壳体密封端,
11.所述摆架设有圆形架,所述圆形架内设有动极板和挠性平桥,所述动极板为弧形板,悬空设置在所述圆形架中心处,其劣弧端与所述挠性平桥一端固定连接,所述挠性平桥另一端固定连接在所述圆形架内侧,
12.所述动极板与所述力矩器定子组件ⅰ、力矩器定子ⅱ组成差动电容传感器,所述力矩器定子组件ⅰ和力矩器定子ⅱ与接地电源连接;
13.所述挠性平桥表面覆盖有导电金属层,用于信号导通,所述配重环53安装在所述力矩器定子ⅱ内,配重环中心两侧设有第一通孔,
14.所述第一力矩器定子、磁钢组件、摆动组件、力矩器定子ⅱ位于同一中心轴线上;
15.进一步,所述差动电容传感器的定极片面包括所述第一定极片面和所述第二定极
片面;
16.所述第一力矩器定子底部设有环槽,环槽内设有第一凸起开口环和磁钢安装沉孔,所述第一凸起开口环内设置磁钢安装沉孔,所述第一凸起开口环上表面为第一定极片面,所述磁钢组件安装在所述磁钢安装沉孔内,所述第一力矩器定子底部厚度为1.5-2mm,
17.所述力矩器定子ⅱ包括底部环槽内的第二凸起开口环,所述第二凸起开口环上表面为第二动极片面,
18.所述第一力矩器定子底部朝向壳体密封端;
19.所述第一力矩器定子底部与设置的磁钢组件、摆动组件和所述力矩器定子ⅱ顺次嵌入设有的紧固环内,与所述紧固环同轴心设置,所述紧固环端面设有0.3mm-0.6mm倒角;
20.进一步,所述导电金属层的宽度为0.6-1mm,所述挠性平桥厚度为0.024-0.029m;
21.进一步,所述配重环为硬铝2a12环;
22.进一步,所述紧固环与所述第一力矩器定子、磁钢组件、摆动组件和所述力矩器定子ⅱ嵌套面处垂直激光焊封;
23.进一步,所述第一力矩器定子远离壳体密封端的端面上设有第一接线端子,第二接线端子、第三接线端子、第四接线端子和第五接线端子,所述伺服电路板上设有的第一接线柱、第二接线柱、第三接线柱、第四接线柱、第五接线柱、第九接线柱,
24.所述第一接线端子,第二接线端子、第三接线端子、第四接线端子和第五接线端子分别与所述第一接线柱、第二接线柱、第三接线柱、第四接线柱、第五接线柱对应连接;
25.所述伺服电路板上还设有若干供所述第一接线端子,第二接线端子、第三接线端子、第四接线端子和第五接线端子穿过的通孔;所述小型加速度计还包括防护帽,所述防护帽与所述通孔相互匹配并密封所述通孔;
26.进一步,所述温度传感器固定连接在所述第一接线端子、第二接线端子、第三接线端子、第四接线端子和第五接线端子中间质心处,距离所述第一力矩器定子中心4mm处,所述温度传感器设置有第一电流输出端,所述第一电流输出端和所述第九接线柱连接;
27.进一步,所述磁钢组件包括磁钢和导磁帽,所述磁钢一端与所述磁钢安装沉孔底端固定连接,导磁帽固定连接在所述磁钢另一端,所述导磁帽外还套设有热敏磁分路环;
28.进一步,所述热敏磁分路环为磁温度补偿合金环1j32补偿环,所述热敏磁分路环厚度为0.275mm;
29.进一步,所述伺服电路板上设置有差动电容检测器、电流计分器和跨导/补偿放大器,所述差动电容传感器输出端与差动电容检测器输入端连接,所述差动电容检测器输出端与电流计分器输入端连接,所述电流计分器输入端输出端与跨导/补偿放大器输入端连接,所述跨导/补偿放大器输出端与所述骨架组件电连接;
30.与现有技术相比,本发明的有益效果在于:
31.(1)本发明设置伺服电路板、温度传感器、力矩器定子组件ⅰ、力矩器定子ⅱ、摆动组件,摆动组件中的摆架设有挠性平桥,使该小型加速计具有挠性支承结构、小型摆组件力学结构、力力矩器定子组件ⅰ的单力矩器结构、摆架中的动极板和力矩器定子组件ⅰ、力矩器定子ⅱ组成的高灵敏度的差动电容传感器和小型反馈式集成伺服电路,使该小型加速度计产生体积小、重量轻、抗振动、冲击能力强、功率小、启动快、稳定性、重复性精度高、环境适应性强的效果。
32.(2)本发明温度传感器设置在所述力矩器定子组件端面上,通过温度传感器输出电流,折算出温度传感器粘接处的精确工作温度,通过温度的变化,便于系统软件的精确补偿,提高系统温度系数精度。
附图说明
33.以下附图仅对本发明作示意性的说明和解释,并不用于限定本发明的范围,其中:
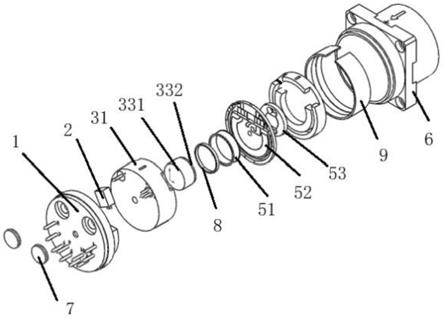
34.图1:本发明实施例提供加速度计的爆炸结构示意图;
35.图2:本发明信号流程图;
36.图3:本发明接线示意图;
37.图4:本发明摆架结构示意图;
38.图中:1-伺服电路板,2-温度传感器,6-壳体,31-第一力矩器定子,33-磁钢组件,51-骨架组件,52-摆架,53-配重环,521-挠性平桥,522-导电金属层,523-动极板,331-磁钢,332-导磁帽,7-防护帽,8-热敏磁分路环,9-紧固环,41-差动电容检测器,42-电流计分器,43-跨导/补偿放大器。
具体实施方式
39.为了使本发明的目的、技术方案、设计方法及优点更加清楚明了,以下结合附图通过具体实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅用于解释本发明,并不用于限定本发明。
40.如图1-图4所示,本发明提供了一种小型加速度计,包括伺服电路板1、温度传感器2、力矩器定子组件ⅰ、力矩器定子ⅱ、摆动组件和壳体6;
41.所述壳体6有圆柱状内腔,内腔一端密封,内腔另一端敞开形成开口,所述力矩器定子组件ⅰ、摆动组件和力矩器定子ⅱ依次设置在内腔内,并与内腔底侧面胶封贴合;
42.所述伺服电路板1位于所述开口处,与壳体6密封连接;
43.所述温度传感器2设置在所述力矩器定子组件ⅰ远离壳体(6)密封端的一端端面上,
44.所述力矩器定子组件ⅰ包括第一力矩器定子31、磁钢组件33,所述力矩器定子组件ⅰ为单力矩器结构,
45.所述摆动组件包括顺次粘结骨架组件51、摆架52、配重环53,
46.所述骨架组件51为环形骨架,所述环形骨架外侧设有环形槽,所述环形槽上均匀缠绕有线圈,其底部对称设置有椭圆槽,所述环形骨架底部朝向所述壳体6密封端,
47.需要说明的是,环形骨架采取φ7.8,底部的椭圆槽为了配合焊接摆架52上的焊盘,同时起到减重的作用;所述环形槽上均匀缠绕有线圈,形成一个力矩器与伺服电路板(1)上的跨导/补偿放大器连接,电流积分器与跨导/补偿放大器一起完成对系统的频率补偿作用,使之满足所要求的静态和动态指标;
48.所述摆架52为石英摆架,所述摆架52设有圆形架,所述圆形架内设有动极板523和挠性平桥521,所述动极板523为弧形板,悬空设置在所述圆形架中心处,其劣弧端与所述挠性平桥521一端固定连接,所述挠性平桥521另一端固定连接在所述圆形架内侧,
49.所述动极板523与所述力矩器定子组件ⅰ、力矩器定子ⅱ组成差动电容传感器,所
述力矩器定子组件ⅰ和力矩器定子ⅱ与接地电源连接;
50.所述挠性平桥521表面覆盖有导电金属层522,用于信号导通,所述配重环53安装在所述力矩器定子ⅱ内,配重环53中心两侧设有第一通孔,
51.所述第一力矩器定子31、磁钢组件33、摆动组件、力矩器定子ⅱ位于同一中心轴线上;
52.需要说明的是,在摆架一侧设置配重环,用于平衡由摆架产生摆性力矩的摆性力矩,比常规双力矩器石英加速度计体积减小30%,实现加速计小型化设计,
53.差动电容传感器,可直接测出惯性检测质量偏离平衡位置的位移,电容传感器即是一个差动电容电桥,力矩器定子部分的端面与摆架的镀层以及它们之间的气隙形成两个空气电容器,当摆架处于中间位置时,两空气电容器的气隙相等,因而两电容器也相等,这时电容电桥处于平衡状态。当摆偏离中间位置时,两空气电容器的气隙则变的不相等,气隙大的电容量变小,气隙小的电容量变大。这样就破坏了电桥的平衡,使电桥有一输出信号;
54.进一步,所述差动电容传感器的定极片面包括所述第一定极片面和所述第二定极片面;
55.所述第一力矩器定子31底部设有环槽,环槽内设有第一凸起开口环和磁钢安装沉孔,所述第一凸起开口环内设置磁钢安装沉孔,所述第一凸起开口环上表面为第一定极片面,所述磁钢组件33安装在所述磁钢安装沉孔内,所述第一力矩器定子31底部厚度为1.5-2mm,
56.需要说明的是,将磁钢安装沉孔深度设计为0.1mm,所述第一力矩器定子31底部厚度1.8mm,选用磁温度补偿合金环套接在粘结导磁帽的磁钢一端外圆上,磁温度补偿合金环底部粘结在力矩器定子组件ⅰ上,为了减小温度系数;
57.所述力矩器定子ⅱ包括底部环槽内的第二凸起开口环,所述第二凸起开口环上表面为第二动极片面,
58.所述第一力矩器定子31底部朝向壳体6密封端;
59.所述第一力矩器定子31底部与设置的磁钢组件、摆动组件和所述力矩器定子ⅱ顺次嵌入设有的紧固环9内,与所述紧固环9同轴心设置,所述紧固环9端面设有0.3mm-0.6mm倒角;
60.进一步,所述导电金属层522的宽度为0.6-1mm,所述挠性平桥521厚度为0.024-0.029m;
61.需要说明的是,所述导电金属层522的宽度由1减小到0.8mm,使零偏平均值降低了30%,使该加速度计稳定性、重复性提升了30%。所述挠性平桥521厚度为0.025mm,其厚度比常规加速度计增加25%,提升了该小型加速度计抗振动、冲击能力为3倍以上;
62.进一步,所述配重环53为硬铝2a12环;
63.进一步,所述紧固环9与所述第一力矩器定子31、磁钢组件、摆动组件和所述力矩器定子ⅱ嵌套面处垂直激光焊封;
64.需要说明的是,将紧固环端面设有c0.5mm倒角,采用垂直激光焊封,使激光焊点分布均匀,位置准确,减小应力,提升可靠性,稳定性、重复性精度比常规加速度计提升30%;
65.进一步,所述第一力矩器定子31远离壳体6密封端的端面上设有第一接线端子,第二接线端子、第三接线端子、第四接线端子和第五接线端子,所述伺服电路板1上设有的第
一接线柱、第二接线柱、第三接线柱、第四接线柱、第五接线柱、第九接线柱,
66.所述第一接线端子,第二接线端子、第三接线端子、第四接线端子和第五接线端子分别与所述第一接线柱、第二接线柱、第三接线柱、第四接线柱、第五接线柱对应连接;
67.所述伺服电路板1上还设有若干供所述第一接线端子,第二接线端子、第三接线端子、第四接线端子和第五接线端子穿过的通孔;所述小型加速度计还包括防护帽7,所述防护帽7与所述通孔相互匹配并密封所述通孔;
68.进一步,所述温度传感器2固定连接在所述第一接线端子、第二接线端子、第三接线端子、第四接线端子和第五接线端子中间质心处,距离所述第一力矩器定子31中心4mm处,所述温度传感器2设置有第一电流输出端,所述第一电流输出端和所述第九接线柱连接;
69.需要说明的是,所述的温度传感器的型号为ad590,是一种电流型结构形式,通过安装在力矩器定子组件端面处的温度传感器输出电流,折算出温度传感器粘接处的精确工作温度,通过温度的变化,便于系统软件的精确补偿,提高系统温度系数精度,
70.在本发明的小型加速度计中,测量的是挠性加速度计质心处的温度:
71.1)温度为-45℃时,温度传感器的输出值为1μa/℃
×
(273-45)℃
×
1kω=228mv;
72.2)温度为25℃时,温度传感器的输出值为1μa/℃
×
(273+25)℃
×
1kω=298mv;
73.3)温度为70℃时,温度传感器的输出值为1μa/℃
×
(273+70)℃
×
1kω=343mv;
74.进一步,所述磁钢组件包括磁钢331和导磁帽332,所述磁钢331一端与所述磁钢安装沉孔底端粘接在一起,导磁帽332粘接在所述磁钢331另一端,所述导磁帽332外还套设有热敏磁分路环8,且一端固定连接在所述磁钢安装沉孔顶端;
75.进一步,所述热敏磁分路环8为磁温度补偿合金环1j32补偿环,所述热敏磁分路环8厚度为0.275mm;
76.需要说明的是,热敏磁分路环可补偿温度升高造成工作气隙磁感应强度的减小;
77.进一步,所述伺服电路板1上设置有差动电容检测器41、电流计分器42和跨导/补偿放大器43,所述差动电容传感器输出端与差动电容检测器41输入端连接,所述差动电容检测器41输出端与电流计分器42输入端连接,所述电流计分器42输入端输出端与跨导/补偿放大器43输入端连接,所述跨导/补偿放大器输出端与所述骨架组件51电连接;
78.需要说明的是,伺服电路根据差动电容传感器的电容量变化而工作,它使得
△
c始终保持在最小值,在极高的回路增益下,由ai引起的惯性力矩将不断被再平衡力矩所平衡;电流积分器与跨导/补偿放大器一起完成对系统的频率补偿作用,使之满足所要求的静态和动态指标;
79.该小型加速度计的高灵敏度的电容传感器及小型反馈式集成伺服电路,使小型加速计的环境适应性强,功率小、启动快;
80.工作过程:壳体组件与伺服电路板1直径为φ19mm,该小型加速度计包括壳体6,壳体6的底面及力矩器定子组件的环面上分别涂一层环氧树脂胶,将力矩器定子组件装入壳体内,使力矩器定子组件外圆面上的刻线与壳体6上的箭头方向对齐,进行常温固化,保证电源地与壳体地的隔离;在力矩器定子组件与壳体6的空隙处涂常温环氧树脂胶,涂胶面约为圆周面的一半,使胶不能流入到力矩器定子组件的接缝内部,再进行常温固化,伺服电路板1与壳体6通过激光焊密封焊接,ad590温度传感器与伺服电路板采用聚四氟乙烯薄膜绕
包绝缘安装线进行对应连接;该加速度计装好以后,充1个大气压的氦气,避免表内元件的氧化,且保证一定的气体阻尼;
81.如图2所示,应用时,当沿该加速度计的输入轴方向有加速度ai作用时,检测质量受到摆性力矩mr作用而发生偏转,使差动电容传感器产生电容量2
×△
c,差动电容检测器用于检测电容量变化而输出电流id,所述电流id由电流积分器积分后输出电压vi,然后由跨导/补偿放大器把vi放大并转化为电流i,电流i的大小与输入加速度成正比,极性取决于输入加速度的方向;输出电流i被反馈到力矩器上,产生再平衡力矩mt以平衡因ai引起的摆性力矩mr,ai和mr皆为连续变量;伺服电路根据差动电容传感器的电容量变化而工作,它使得
△
c始终保持在最小值;在极高的回路增益下,由ai引起的惯性力矩将不断被再平衡力矩所平衡;电流积分器与跨导/补偿放大器一起完成对系统的频率补偿作用,使之满足所要求的静态和动态指标。
82.以上已经描述了本发明的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。本文中所用术语的选择,旨在最好地解释各实施例的原理、实际应用或对市场中的技术改进,或者使本技术领域的其它普通技术人员能理解本文披露的各实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1