一种基于角度残差的NLOS传输基站识别与定位方法
一种基于角度残差的nlos传输基站识别与定位方法
技术领域
1.本发明涉及无线定位技术领域,针对nlos传输环境中的基站识别和定位方法,能识别出nlos传输基站和los传输基站,并且利用los传输基站对ms进行定位。
背景技术:
2.无线定位是指利用包含在接收信号中的角度和距离等参数来估计移动终端位置的一种技术。近年来,由于经济发展和人们生活的需求,该技术已经得到了广泛地应用,它可以提供包括紧急呼救、旅游信息服务、车辆管理等在内的业务,同时也被应用到了基于位置信息的收费系统和智能交通系统中,是物联网的重要组成部分。
3.在实际的无线传输环境中,发送端发出的信号由于障碍物的存在并不会始终沿着直线传输,障碍物使得信号经过散射和衍射才能够到达接收端,造成接收端得到的距离以及角度等信息含有较大的误差,从而显著降低了无线定位算法的精度。据此,在无线定位技术的实际应用中,减少甚至降低非视距(nlos,non-line-of-sight)传输带来的误差是非常有必要的。根据摩托罗拉和爱立信对的实地测量发现,nlos误差有随着移动台(ms,mobile station)和基站或基地台(bs,base station)之间直线距离的增加而上升的趋势,这就更加剧了对传统定位算法精度的影响。
技术实现要素:
4.为了克服已有无线定位方式的误差较大、定位精度较低的不足,本发明提供一种有效减少误差、提升定位精度的基于角度残差的nlos传输基站识别与定位方法。
5.本发明解决其技术问题所采用的技术方案是:
6.一种基于角度残差的nlos传输基站识别与定位方法,所述定位方法包括以下步骤:
7.1)由多个基站接收移动台ms的发送信号,假设已经估计信号中的到达时间toa以及到达角度aoa信息,同时定位主基站中可获得这些估计信息以及参与定位的基站bs坐标。
8.2)每两个基站分为一组,假设参与定位的基站有n个,则可分为组,定位主基站中提取各个分组内的bs坐标以及相应测距、测角信息,其中测距信息等效于toa,测角信息等效于aoa;
9.3)对于每个分组,定位主基站基于三角几何方法计算两个bs与目标ms之间的夹角,之后计算测量角度与计算角度之间的差值,据此得到每一个分组的角度残差;
10.4)比较残差值和门限之间的大小关系,如果小于门限,则该组基站为los传输基站,否则判断该组基站中存在nlos传输基站;
11.5)对所有的基站组重复4)中门限对比处理,将识别结果进行综合,得到所有的nlos传输基站以及los传输基站;
12.6)提取5)中的los传输基站,根据定位几何关系,使用其对应的toa和aoa信息构建定位方程组;
13.7)将定位方程组进行线性化处理;
14.8)利用两步加权最小二乘算法对ms坐标进行估计。
15.进一步说明,步骤3)中,假定两个bs与1个ms构成的拓扑图中,点a、点b分别代表两个基站的位置,点c代表一个移动台ms的位置,根据三角几何方法可得线段ab和线段bc之间的夹角余弦值为:
[0016][0017]
式中a,b,c,θ2'分别表示b
→
c的bs测量距离、a
→
c的bs测量距离、a
→
b的bs间距离以及∠abc的计算角度值,由于bs坐标已知,则c可以事先计算好。同理线段ba和线段ac之间的夹角余弦值可计算得到:
[0018][0019]
其中θ1'表示∠bac的计算角度值。
[0020]
根据测量得到的aoa信息以及计算得到的角度数值,定义角度残差为
[0021]
δ1=|θ
1-θ1'|,δ2=|θ
2-θ2'|
ꢀꢀꢀ
(3)
[0022]
假设ab为x轴,则θ1、θ2即为基站a、基站b测量的到达角。如果定位环境中不存在nlos传输,δ1和δ2都比较小,否则由于nlos误差影响,它们的数值可能较大。
[0023]
选择合适的残差变量对nlos传输的识别精准度影响很大,而上述过程中角度测量与距离测量是相互影响的两个参数,但是角度测量比距离测量更容易受到nlos误差的影响,对于定位性能的影响也更强。因此本发明研究通过角度变量的测量与计算分析来定义残差,从而基于角度残差建立nlos传输基站识别器:
[0024][0025]
公式(4)表明,当分组中得到的两个角度残差数值均小于设定门限数值时,将该组bs判定为los传输,反之则至少存在一个bs受到nlos传输的影响。
[0026]
再进一步,所述步骤4)中,根据定位几何关系和残差的扰动分析,定义门限th2为
[0027][0028]
其中σr,σa分别代表距离测量噪声和角度测量噪声的标准差,这两个值通过多次测量估计得到,θ2'表示夹角∠abc的计算数值,其中cosθ2'见式1,同理定义th1为
[0029][0030]
其中,θ1'表示夹角∠bac的计算数值,其中cosθ1'见式2,同时由于参数λ的数值直接影响门限的判定结果,此处通过计算机仿真来确定。
[0031]
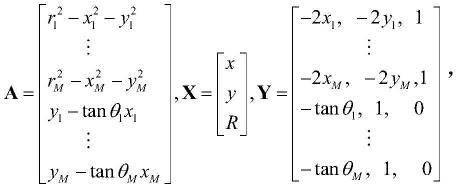
更进一步,在所述步骤5)中,实现对los传输基站的正确识别之后,利用它们的测量值对ms进行位置估计;首先根据定位主基站中获取的信息,定义ms的坐标为(x,y),第i个
bs的坐标为(xi,yi),第i个bs和ms之间的测距和角度测量数值分别设定为ri和θi,在所述步骤6)和7)中,根据测量距离和到达角的几何意义,构建线性定位方程组:
[0032]
y=ax
ꢀꢀꢀ
(7)
[0033]
其中r=x2+y2,在基站识别阶段,ri对应于相应的a或者b,公式(7)中的m代表步骤4)中基站识别阶段筛选出的los传输基站数,m取值小于等于n。
[0034]
所述步骤8)中,首先根据最小二乘准则,得到:
[0035][0036]
将测距ri的真实直线距离用r
i0
表示,对应的误差向量可以表示为:
[0037][0038]
其中ei,αj分别代表距离和角度相对于其真实值的测量误差,t算子代表矩阵转置,用矩阵形式表示上述公式(9),可得到:
[0039]
ψ=2bz
ꢀꢀꢀ
(10)
[0040]
其中z=[e1,e2,...,em,α1,α2,...,αm]
t
,diag{
·
}表示以大括号内元素为对角元素的对角矩阵,b的协方差矩阵如下
[0041]
ψ=e[ψψ
t
]=4bqb
ꢀꢀꢀ
(11)
[0042]
式中分别表示第i个bs处测量距离和测量到达角的方差。
[0043]
所述步骤8)中,利用最小二乘算法求得x的解:
[0044][0045]
的协方差矩阵为:
[0046][0047]
由于上述wls估计得到的三个元素实际上并不独立,因此进行第2次最小二乘估计,假设中三个元素的误差分别为s1,s2和s3,那么
[0048][0049]
因此就定义另外一组误差向量为:
[0050]
ψ'=b'-a'x'
ꢀꢀꢀ
(15)
[0051]
其中
[0052][0053]
从上式推得
[0054][0055]
那么向量ψ'的协方差矩阵就是
[0056][0057]
所述步骤8)中,再次根据wls算法,得到x'的解为
[0058][0059]
最后得到ms的可能位置为
[0060][0061]
并且选择(19)中最接近(12)结果的解作为最终的估计。
[0062]
本发明的技术构思为:将参与定位的基站中存在nlos传输路径的基站进行删除,仅保留los传输基站的测量信息进行处理,并将其应用于ms坐标估计。这里los(nlos)传输基站是指ms到达该基站的传播路径是los(nlos)的。参与ms定位的los基站数目越多,nlos传输带来的误差影响便足够小,可实现ms定位的准确性,因此nlos基站识别技术在提高ms定位准确性上非常重要。其关键在于基站识别所需的残差定义和门限确定,本发明利用无线定位中对nlos误差变化更为敏感的角度变量进行残差定义和计算,通过门限与残差的比较来识别los传输基站。本发明优化了传统残差的计算方式,同时由于角度残差对nlos误差变化的敏感性,与边长残差对比,提升了nlos识别精度。在获得los基站之后,可以利用各种经典的三边定位法估计ms位置。
[0063]
本发明的有益效果主要表现在:在得到bs和ms之间的距离(等效于toa)以及到达角的估计值之后,对基站进行分组,每一组基站都通过测距信息计算得到两个计算角度数值以及角度残差数值。根据定位几何关系和残差的扰动分析与仿真,得到nlos传输基站识别器的角度门限值,由于角度变量对nlos误差变化更为敏感,角度残差可获得更精确的结果。通过比较门限和各组角度残差计算值,就能识别出nlos传输基站和los传输基站。根据得到的los传输基站测量信息进行ms位置估计,估计算法可以是ls方法或者两步wls方法以及其他任意传统方法,本发明以ls方法和两步wls方法为例说明性能。本发明的识别准确性高,而且在识别之后还采用精度较高的两步wls算法对ms的位置进行估计,因此在nlos/los传输环境中,本发明的定位精度很高。
附图说明:
[0064]
图1为基于角度残差的nlos传输基站识别与定位方法处理步骤图。
[0065]
图2为定位几何示意图。
[0066]
图3为测角标准差对各算法均方误差(rmse:root means square errors)影响的示意图,其中,(a)为2los-bs,(b)为3los-bs,(c)为4los-bs。图上横坐标为测角标准差(单位为度),纵坐标为rmse(单位为米)。
[0067]
图4为测距标准差对各算法均方误差影响的示意图,其中,(a)为2los-bs,(b)为3los-bs,(c)为4los-bs。图上横坐标为测距标准差(单位为米),纵坐标为rmse(单位为米)。
[0068]
上述图中nlos-bs指实际los基站数目为n个,仿真采用小区半径为1000米的经典5基站拓扑,即n=5。
[0069]
上述仿真图中用到的对比算法如表1:
[0070]
表1
[0071]
算法描述ni-ts-wls-a本发明方法rwgh残差加权方法cls约束最小二乘方法pr-ts-wls定位残差识别之后用两步最小二乘法ni-ts-wls边长残差识别之后用两步最小二乘法ni-ls-a本发明的基站识别后用最小二乘方法the ideal ni-ts-wls已知los基站用两步wls方法
[0072]
表1中,rwgh方法来自于文献1:chen p c,a non-line-of-sight error mitigation algorithm in location estimation[a],proc.ieee wireless communications and networking conference wcnc’99[c],new orleans,1999:316-320;即chen p c,位置估计中的一种非视距误差消除算法[a],1999年ieee无线通信与网络国际会议论文集[c],新奥尔良,1999:316-320。cls方法来自于文献2:wang x,a toa-based location algorithm reducing the errors due to non-line-of-sight(nlos)propagation[j],ieee transactions on vehicular technology,2003,52(1):112-116;即wang x,一种能减少非视距传播误差的toa定位算法[j],ieee车载技术汇刊,2003,52(1):112-116。ni-ts-wls-a为本发明的识别定位方法(定位部分采用双步wls);ni-ls-a为本发明基站识别后用最小二乘算法定位;ni-ts-wls来自于华惊宇,周凯,李枫,徐志江,孟利民.一种基于边长残差的nlos传输基站识别与定位方法[p].浙江:cn105979583a,2016-09-28.pr-ts-wls来自于华惊宇,李溯南,李枫,徐志江,卢为党.一种基于定位位置残差加权的定位方法[p].浙江:cn106125043a,2016-11-16.the ideal ni-ts-wls表示完美已知los基站信息用两步wls算法定位,它的性能最优秀,作为比较的基准。
具体实施方式
[0073]
参照图1~图4,一种基于角度残差的nlos传输基站识别与定位方法,所述方法包括以下步骤:
[0074]
1)由多个基站接收移动台ms的发送信号,假设已经估计信号中的到达时间toa以及到达角度aoa信息,同时定位主基站中可获得这些估计信息以及参与定位的基站bs坐标。
[0075]
2)每两个基站分为一组,假设参与定位的基站有n个,则可分为组,定位主基站中提取各个分组内的bs坐标以及相应测距、测角信息,其中测距信息等效于toa,测角信息等效于aoa;
[0076]
3)对于每个分组,定位主基站基于三角几何方法计算两个bs与目标ms之间的夹角,之后计算测量角度与计算角度之间的差值,据此得到每一个分组的角度残差;
[0077]
4)比较残差值和门限之间的大小关系,如果小于门限,则该组基站为los传输基站,否则判断该组基站中存在nlos传输基站;
[0078]
5)对所有的基站组重复4)中门限对比处理,将识别结果进行综合,得到所有的nlos传输基站以及los传输基站;
[0079]
6)提取5)中的los传输基站,根据定位几何关系,使用其对应的toa和aoa信息构建定位方程组;
[0080]
7)将定位方程组进行线性化处理;
[0081]
8)利用两步加权最小二乘算法对ms坐标进行估计。
[0082]
进一步详述基于角度残差的nlos传输基站识别定位方法。不失一般性,假设图2中点a、点b分别代表两个基站的位置,点c代表一个移动台ms的位置,由于点a和点c之间存在障碍物,因此被视为nlos传输,而点b与点c之间为los传输。注意图2仅为nlos传输示意图,实际传输环境可能包括双los传输基站和双nlos传输基站,本发明的基站识别方法对三种传输情形都适用。图2中基站a为nlos传输基站,其测量角度以及测量距离都包含nlos误差,而基站b则为los传输基站,故其测量距离和测量角度都非常接近真实值。
[0083]
根据图2,如果基站a和基站b都是los传输,那么a、b、c三点可以构成一个三角形,根据三角几何关系可知线段ab和线段bc之间的夹角余弦值为:
[0084][0085]
式中a,b,c,θ2'分别表示表示b
→
c的bs测量距离、a
→
c的bs测量距离、a
→
b的bs间距离以及∠abc的计算角度值,由于bs坐标已知,则c可以事先计算好。同理线段ba和线段ac之间的夹角余弦值可计算得到:
[0086][0087]
式中θ1'分别表示∠bac的计算角度值。
[0088]
根据aoa数值以及计算得到的角度值,定义角度残差为
[0089]
δ1=|θ
1-θ1'|,δ2=|θ
2-θ2'|
ꢀꢀꢀ
(3)
[0090]
其中θ1、θ2分别表示基站a和基站b测量的到达角和直线与x轴夹角之差的绝对值;假设ab即为x轴,则θ1、θ2即为基站a、基站b测量的到达角。如果定位环境中不存在nlos传输,δ1和δ2都比较小,否则由于nlos误差的影响,它们的数值可能较大。
[0091]
选择合适的残差变量对nlos传输的识别精准度影响很大,而上述过程中角度测量和距离测量是相互影响的两个参数,但是角度测量比距离测量更容易受到nlos误差的影响,对定位性能的影响更强。因此本发明研究通过角度变量的测量与计算分析来定义残差,从而基于角度残差建立nlos传输基站识别器:
[0092][0093]
公式(4)表明,各个分组中得到的角度残差数值都小于设定门限数值时,将该组bs判定为los传输,反之则至少存在一个bs受到nlos传输的影响。
[0094]
再进一步,所述步骤4)中,根据定位几何关系和残差的扰动分析,定义门限th2为
[0095][0096]
其中σr,σa分别代表距离测量噪声和角度测量噪声的标准差,这两个数值一般通过多次测量估计得到,本发明中通过外界的aoa和toa估计器提供,所提出算法不直接估计这两个参数。θ2'表示夹角∠abc的真实数值,其中cosθ2'见式1,同理定义th1为
[0097][0098]
其中,θ1'表示夹角∠bac的真实数值,其中cosθ1'见式2,同时由于参数λ的数值直接影响门限的判定结果,因此通过计算机仿真来确定,本发明得到的仿真值为3.1。
[0099]
在所述步骤5)实现对los传输基站的正确识别之后,利用它们的测量值对ms进行位置估计,本发明称之为定位阶段。在所述步骤6)和7)中,首先根据定位主基站中获取的信息,定义ms的坐标为(x,y),第i个bs的坐标为(xi,yi),第i个bs和ms之间的测距和角度测量数值分别设定为ri和θi,根据测量距离和到达角的几何意义,构建线性定位方程组:
[0100]
y=ax
ꢀꢀꢀ
(7)
[0101]
其中r=x2+y2,在基站识别阶段,ri对应于相应的a或者b,公式7)中的m来自于步骤4)中基站识别阶段筛选出的los传输基站数,m取值小于等于n。
[0102]
所述步骤8)中,首先根据最小二乘准则,得到:
[0103][0104]
用r
i0
表示ri的真实直线距离,并定义误差向量:
[0105][0106]
其中ei,αj分别代表距离和角度相对于其真实值的测量误差,t算子代表矩阵转置。若将(9)转变成矩阵相乘的形式,即得到:
[0107]
ψ=2bz
ꢀꢀꢀ
(10)
[0108]
其中z=[e1,e2,...,em,α1,α2,...,αm]
t
,diag{
·
}表示以大括号内元素为对角元素的对角矩阵,b的协方差矩阵如下
[0109]
ψ=e[ψψ
t
]=4bqb
ꢀꢀꢀ
(11)
[0110]
式中分别表示第i个bs处测量距离和测量到达角的方差。
[0111]
所述步骤8)中,利用wls算法求得x的解:
[0112][0113]
前人研究表明的协方差矩阵为:
[0114][0115]
由于上述wls估计得到的的三个元素实际上并不独立,因此需要进行第2次最小二乘估计。假设中三个元素的误差分别为s1,s2和s3,那么
[0116][0117]
因此就可以定义另外一组误差向量为:
[0118]
ψ'=b'-a'x'
ꢀꢀꢀ
(15)
[0119]
其中
[0120][0121]
从上式推得
[0122][0123]
那么向量ψ'的协方差矩阵就是
[0124][0125]
所述步骤7)中,再次根据wls算法,得到x'的解为
[0126][0127]
最后得到ms的可能位置为
[0128][0129]
并且选择(19)中最接近(12)结果的解作为最终的估计,由于估计过程采用了两次wls求解,所以称为两步wls算法。
[0130]
图1主要是对本发明的具体实现过程描述,首先获取定位主基站中每个基站的toa和aoa估计值,然后对参与定位的基站进行分组,每组有两个基站。对于每一个基站组,利用上述推导公式计算其对应的角度残差和门限值,之后通过nlos传输基站识别器判决该组基站是否为los传输基站,最后对所有的基站组判断结果进行综合,即可区分所有的los传输基站和nlos传输基站。对包含nlos传输的基站测量信息予以抛弃,仅利用los传输基站的测量信息结合定位几何原理构造定位方程组,并将其进行线性化处理,最后采用两步wls算法对ms的位置进行估计。
[0131]
图2是一个基站组中定位几何关系示意图。其中点a和点b表示两个bs基站,点c代表一个ms,点d表示a-c路径上的电磁波反射体。由于bs位置固定,因此距离数值c可提前计算。点a处bs测量的距离和角度分别为b和θ1,点b处bs测量的距离和角度分别为a和θ2。θ3表示存在nlos基站情况下ms端测得的角度误差,此处仅作示意,不参与计算过程。
[0132]
图3绘制了测角标准差对各算法均方根误差(rmse,root mean square error)的影响,其中测距标准差固定为10米。研究基于经典的五基站拓扑,以(0,0)点为拓扑中心,其余四个点分别为(1000,1000),(-1000,1000),(-1000,-1000),(1000,-1000),单位是米。图中横坐标表示aoa测量标准差,纵坐标表示均方根误差,nlos-bs代表5个基站中有n个los基站。从图中可以看出,在los基站数目为2的时候本发明精度比理想情况下的精度低,但仍优于传统的定位算法。当los基站的数目上升为3和4的时候,角度残差识别定位算法的曲线非常接近于作为基准的the ideal ni-ts-wls曲线,且随着角度测量标准差的增大始终保持平稳增长的趋势,与定位残差和边长残差数值相比,保证精确度的情况下更具有鲁棒性。另外,ni-ls-a由于没有使用toa/aoa的两步wls算法,因此精度一直要低于ni-ts-wls-a算法,这也说明基于toa/aoa混合参数的两步wls算法在los环境中的精度还是要优于传统的最小二乘算法。
[0133]
图4比较测距标准差对各算法均方根误差的影响,仿真环境与图3相同,此时横坐标表示测距标准差的数值,测角标准差固定为1度。虽然本发明的算法在los基站数目为2的时候的精度比理想情况下的精度低,但还是要好于传统的定位算法。当los基站的数目上升为3和4的时候,角度残差识别定位算法的曲线非常接近于作为基准的the ideal ni-ts-wls曲线,这就表明本文算法的识别准确率几乎达到了100%。与定位残差和边长残差相比较,角度残差的识别精准度始终优于两者,体现出角度变量应用于nlos传输识别的优越性。另外,ni-ls-a由于没有使用toa/aoa的两步wls算法,因此精度一直要低于ni-ts-wls-a算法,这也说明基于toa/aoa混合参数的两步wls算法在los环境中的精度还是要优于传统的最小二乘算法。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1