利用LIDAR传感器跟踪物体的方法和装置以及存储执行该方法的程序的记录介质与流程
利用lidar传感器跟踪物体的方法和装置以及存储执行该方法的程序的记录介质
1.相关申请的交叉引用
2.本技术要求2021年3月15日提交的韩国专利申请no.10-2021-0033359的优先权,该申请的全部内容结合于此用于通过该引用的所有目的。
技术领域
3.本发明涉及一种利用光检测和测距(light detection and ranging,lidar)传感器跟踪物体的方法和装置,并且涉及一种存储执行该方法的程序的记录介质。
背景技术:
4.在利用由lidar传感器获得的多个lidar点生成轨迹之前,需要在预处理过程中确定lidar点是与路面相对应的点还是与物体相对应的点。具体地,由于lidar点受外部环境的影响很大,因此近来进行了各种研究,以使得能够在不受外部环境影响的情况下确定lidar点是与路面相对应还是与物体相对应。
5.在本背景技术部分中包括的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
技术实现要素:
6.本发明的各个方面旨在提供一种利用光检测和测距(lidar)传感器跟踪物体的方法和装置,并且旨在一种存储执行该方法的程序的记录介质,其基本上避免了由于相关技术的限制和缺点而产生的一个或更多个问题。
7.实施方案提供了一种利用lidar传感器跟踪物体的方法和装置,以及一种存储执行该方法的程序的记录介质,从而能够准确并快速地跟踪物体。
8.然而,通过示例性实施方案要完成的目的不限于上述目的,并且本领域的技术人员将从以下描述中清楚地理解本文中未提及的其他目的。
9.根据本发明的各种示例性实施方案的利用lidar传感器的物体跟踪方法可以包括:利用车辆行驶区域的全球定位系统(global positioning system,gps)高度点来形成第一倾斜度,利用车辆的lidar点来检测行驶车道并利用检测到的行驶车道来确定第二倾斜度,利用第一倾斜度和第二倾斜度来旋转gps高度点,利用lidar点之中的目标点和相邻点来获得第三倾斜度(所述相邻点属于与目标点所属的当前层相邻的前一层),利用旋转后的gps高度点之中与lidar点匹配的点来获得第四倾斜度,以及当第三倾斜度与第四倾斜度之间的差的绝对值小于阈值倾斜度时,确定目标点为地面点。
10.例如,所述物体跟踪方法可以进一步包括:获取车辆行驶区域的gps高度点以及在车辆行驶区域内生成指示位于gps高度点之间的区域的高度的插值的高度点,第一倾斜度可以利用gps高度点或插值的高度点中的至少一些来形成。
11.例如,形成第一倾斜度可以进一步包括在车辆行驶区域内选择位于以车辆为中心的第一距离内的第一检查目标区域,所述第一倾斜度可以利用第一检查目标区域内的gps高度点或插值的高度点中的至少一些来形成。
12.例如,检测行驶车道可以包括:从lidar点之中选择存在于以车辆为中心的预定距离内的lidar点,从选择出的存在于预定距离内的lidar点之中选择具有相对高强度的lidar点,从具有相对高强度的lidar点之中选择具有线性性质的lidar点作为与行驶车道相对应的lidar点。
13.例如,确定第二倾斜度可以进一步包括在车辆行驶区域内选择位于以车辆为中心的第二距离内的第二检查目标区域,所述第二倾斜度可以利用选择出的与行驶车道相对应的lidar点之中存在于第二检查目标区域内的lidar点来确定。
14.例如,第一距离与第二距离可以彼此相同。
15.例如,旋转后的gps高度点可以形成等于第一倾斜度与第二倾斜度之和的倾斜度。
16.例如,阈值倾斜度可以是0.5
°
。
17.例如,物体跟踪方法可以进一步包括:对lidar点进行预处理,将预处理后的lidar点根据预定标准聚类为有意义的单元,以及利用聚类后的lidar点来分析物体的形状,可以在对lidar点进行预处理时执行获得第一倾斜度至第四倾斜度、旋转gps高度点以及确定目标点是否为地面点。
18.根据本发明的另一示例性实施方案的利用lidar传感器的物体跟踪装置可以包括:第一倾斜度获取单元、第二倾斜度获取单元、高度点旋转单元、第三倾斜度获取单元、第四倾斜度获取单元、比较单元和点属性确定单元,第一倾斜度获取单元配置为利用车辆行驶区域的gps高度点来形成第一倾斜度,第二倾斜度获取单元配置为利用车辆的lidar点来检测行驶车道并利用所述行驶车道来确定第二倾斜度,高度点旋转单元配置为利用第一倾斜度和第二倾斜度来旋转gps高度点,第三倾斜度获取单元配置为利用lidar点之中的目标点和相邻点来确定第三倾斜度(所述相邻点属于与目标点所属的当前层相邻的前一层),第四倾斜度获取单元配置为利用旋转后的gps高度点之中与lidar点匹配的点来确定第四倾斜度,比较单元配置为将第三倾斜度与第四倾斜度之间的差的绝对值与阈值倾斜度进行比较,点属性确定单元配置为响应于比较单元的比较结果来确定目标点是地面点还是物体点。
19.例如,所述物体跟踪装置可以进一步包括gps高度获取单元,其配置为获取车辆行驶区域的gps高度点。
20.例如,所述物体跟踪装置可以进一步包括高度点插值单元,高度点插值单元配置为在车辆行驶区域内生成指示位于gps高度点之间的区域的高度的插值的高度点,所述第一倾斜度获取单元可以利用gps高度点或插值的高度点的至少一些来形成第一倾斜度。
21.例如,第二倾斜度获取单元可以包括点选择单元和倾斜度计算单元,点选择单元配置为从lidar点之中选择与行驶车道相对应的lidar点,倾斜度计算单元配置为利用由点选择单元选择出的lidar点来确定第二倾斜度。
22.例如,点选择单元可以包括距离检查单元、强度检查单元和线性度检查单元,距离检查单元配置为从lidar点之中选择存在于以车辆为中心的预定距离内的lidar点,强度检查单元配置为从选择出的存在于预定距离内的lidar点之中选择具有相对高强度的lidar
点,线性度检查单元配置为从具有相对高强度的lidar点之中选择具有线性性质的lidar点作为与行驶车道相对应的lidar点。
23.例如,所述高度点旋转单元可以包括倾斜度合成单元,所述倾斜度合成单元配置为将第一倾斜度与第二倾斜度求和,并输出由求和后的倾斜度形成的旋转后的gps高度点。
24.例如,阈值倾斜度可以是0.5
°
。
25.例如,所述物体跟踪装置可以进一步包括:lidar传感器、预处理单元、聚类单元和形状分析单元,lidar传感器配置为获取与车辆行驶区域相关的lidar点,预处理单元配置为对lidar点进行预处理(预处理单元包括第一倾斜度获取单元、第二倾斜度获取单元、第三倾斜度获取单元、第四倾斜度获取单元、高度点旋转单元、比较单元和点属性确定单元),聚类单元配置为将预处理后的lidar点根据预定标准聚类为有意义的单元,形状分析单元配置为利用聚类后的lidar点来分析物体的形状。
26.根据本发明的各种示例性实施方案,在其中记录了用于执行利用lidar传感器跟踪物体的方法的程序的计算机可读记录介质可以存储用于实现以下功能的程序:利用车辆行驶区域的gps高度点来形成第一倾斜度的功能,利用车辆的lidar点来检测行驶车道并利用检测到的行驶车道来确定第二倾斜度的功能,利用第一倾斜度和第二倾斜度来旋转gps高度点的功能,利用lidar点之中的目标点和相邻点(所述相邻点属于与目标点所属的当前层相邻的前一层)来获得第三倾斜度的功能,利用旋转后的gps高度点之中与lidar点匹配的点来获得第四倾斜度的功能,以及当第三倾斜度与第四倾斜度之间的差的绝对值小于阈值倾斜度时,确定目标点为地面点的功能。
27.本发明的方法和装置具有其它的特性和优点,这些特性和优点从并入本文中的附图和随后的实施方案中将是显而易见的,或者将在并入本文中的附图和随后的实施方案中进行详细陈述,这些附图和实施方案共同用于解释本发明的特定原理。
附图说明
28.图1是示出根据本发明的示例性实施方案的利用lidar传感器的物体跟踪方法的流程图。
29.图2是根据本发明的示例性实施方案的利用lidar传感器的物体跟踪装置的框图。
30.图3是示出根据实施方案的物体跟踪方法的流程图。
31.图4是示出图3所示的步骤122的示例性实施方案的流程图。
32.图5是用于帮助理解图4所示的步骤122a的示意图。
33.图6是用于帮助理解图3所示的步骤124的示例性实施方案的流程图。
34.图7是用于帮助理解图3所示的步骤124至步骤128的示意图。
35.图8是用于帮助理解图3所示的步骤126的示例性实施方案的流程图。
36.图9是示出图8所示的步骤230的示例性实施方案的流程图。
37.图10是用于帮助理解图8所示的步骤250的示意图。
38.图11是示出作为示例的目标点和相邻点的示意图。
39.图12a和图12b是用于帮助理解图3所示的步骤130至步骤138的示意图。
40.图13是用于帮助理解图3所示的步骤132的示意图。
41.图14是根据实施方案的利用lidar传感器的物体跟踪装置的框图;
42.图15是图14所示的高度信息获取单元的示例性实施方案的框图。
43.图16是图14所示的第二倾斜度获取单元的示例性实施方案的框图。
44.图17是图16所示的点选择单元的示例性实施方案的框图。
45.图18是示出图14所示的高度点旋转单元的示例性实施方案的框图。
46.图19a、图19b和图19c示出当车辆行驶区域内包括上坡路时,利用根据比较性示例和示例性实施方案的物体跟踪方法和装置获得的结果。
47.图20a、图20b和图20c示出当车辆行驶区域中包括下坡路时,利用根据比较性示例和示例性实施方案的物体跟踪方法和装置获得的结果。
48.图21a、图21b和图21c示出当车辆行驶区域内不包括下坡路和上坡路时,利用根据比较性示例和示例性实施方案的物体跟踪方法和装置获得的结果。
49.可以理解的是,所附附图并非按比例地绘制,而是图示性地简化呈现各种特征以显示本发明的基本原理。本文所公开的本发明的具体设计特征(包括例如具体尺寸、方向、位置和外形)将部分地由具体所要应用和使用的环境来确定。
50.在附图中,贯穿附图的多幅图,附图标记指代本发明的相同或等同的部分。
具体实施方式
51.现在将详细地参考本发明的各个实施方案,这些实施方案的示例示出在附图中并描述如下。尽管将结合本发明的示例性实施方案对本发明进行了描述,但是应当理解的是,本说明书并非旨在将本发明限制为那些示例性实施方案。另一方面,本发明旨在不仅覆盖本发明的示例性实施方案,而且还覆盖可以包括在由所附权利要求所限定的本发明的精神和范围之内的各种替选形式、修改形式、等同形式及其它实施方案。
52.下文将参考所附附图对本发明进行更为全面的描述,在这些附图中显示了各个示例性实施方案。然而,这些示例可以以许多不同的形式来实现,并且可以不被解释为限于本文所陈述的实施方案。相反,提供这些实施方案以使本发明更加全面和完整,并且将本发明的范围充分地传达给本领域的技术人员。
53.将理解的是,当一个元件称为在另一元件“上”或“下”时,其可以直接在该元件上/下,或者还可以存在一个或更多个中间元件。
54.当一个元件称为在“上”或“下”时,可以基于该元件包括“在该元件下”和“在该元件上”。
55.此外,关系术语(例如,“第一”、“第二”、“上/上部/上方”和“下/下部/下方”)仅用于区分一个主体或元件与另一主体或元件,而不必要求或涉及主体或元件之间的任何物理或逻辑关系或顺序。
56.在下文中,将参考附图来描述根据示例性实施方案的利用光检测和测距(lidar)传感器来跟踪物体的方法和装置和存储执行该方法的程序的记录介质。为了便于描述,将利用笛卡尔坐标系(x轴、y轴、z轴)来描述利用lidar传感器来跟踪物体的方法和装置和存储执行该方法的程序的记录介质,但也可以利用其他的坐标系来描述。在笛卡尔坐标系中,x轴、y轴和z轴彼此垂直,但示例性实施方案不限于此。也就是说,x轴、y轴和z轴可以相互斜交。
57.图1是示出根据本发明的各个示例性实施方案的利用lidar传感器的物体跟踪方
法100的流程图,图2是根据本发明的示例性实施方案的利用lidar传感器的物体跟踪装置300的框图。
58.图2所示的物体跟踪装置300可以包括:lidar传感器310、预处理单元320、聚类单元340和形状分析单元(或分段单元)350。
59.lidar传感器310可以获取包括与设置有lidar传感器310的车辆(以下称为“本车”)行驶的区域(或包括行驶区域和周围区域的区域)(以下称为“车辆行驶区域”)相关的多个点的点云,并且可以将获取的点云作为lidar点(或lidar数据)输出到预处理单元320(步骤110)。
60.lidar传感器310将具有例如905nm至1550nm波长的单个圆形激光脉冲辐射至车辆行驶区域,并且可以测量激光脉冲从存在于测量范围内的物体或地面(或路面)反射所花费的时间,用于检测关于物体和地面的信息,例如,从lidar传感器310到物体或地面的距离、物体或地面的方位、物体的速度、物体的温度、物体的材料分布以及物体的浓度特性。这里,物体可以是要由根据本发明的示例性实施方案的物体跟踪装置跟踪的目标(例如,存在于本车外部的另一车辆、人或障碍物)。
61.lidar传感器310可以包括发射器和接收器,发射器发射激光脉冲,接收器接收从存在于检测范围内的物体的表面和地面反射的激光。接收器具有预定的视场(field of view,fov),预定的视场是lidar传感器310配置为在不移动或旋转的情况下同时观察的范围。
62.由于lidar传感器310在竖直/水平方向上具有比无线电检测和测距(radio detecting and ranging,radar)传感器更高的检测精度,因此lidar传感器310配置为提供准确的竖直/水平方向位置信息,并因此有利地用于障碍物检测和车辆位置识别。作为lidar传感器310的示例,存在二维(2d)lidar传感器和三维(3d)lidar传感器。2d lidar传感器配置为可倾斜或可旋转的,并且用于通过倾斜或旋转获得包括3d信息的lidar数据。3d lidar传感器配置为获得多个3d点,从而预测障碍物的高度信息,进而帮助准确和精密地检测和跟踪物体。3d lidar传感器可以包括多个2d lidar传感器层,并且可以生成包括3d信息的lidar数据。根据示例性实施方案的lidar传感器310可以与3d lidar传感器相对应。
63.根据示例性实施方案的跟踪物体的方法和装置不限于任何特定形状、位置或类型的lidar传感器310。
64.在步骤110之后,预处理单元320可以对从lidar传感器310输出的lidar点进行预处理(步骤120)。为此,预处理单元320可以执行校准以将lidar传感器310与本车之间的坐标进行匹配。即,预处理单元320可以根据lidar传感器310安装于本车的位置角将lidar点转换为适合于参考坐标系的点。
65.此外,预处理单元320可以利用lidar点的强度或置信度信息执行滤波以移除具有低强度或反射率的点。
66.此外,预处理单元320可以移除与来自本车的反射有关的数据。即,由于存在根据lidar传感器310的安装位置和视场而被本车的车身屏蔽的区域,因此预处理单元320可以利用参考坐标系移除与来自本车的车身的反射有关的数据。
67.在步骤120之后,聚类单元340可以将由预处理单元320预处理后的lidar点根据预定标准聚类为有意义的单元,并且可以将聚类后的lidar点输出到形状分析单元350(步骤
140)。作为聚类单元340的示例,存在2d聚类单元和3d聚类单元。2d聚类单元是通过在不考虑高度信息的情况下将数据投影到x-y平面上,以点或特定结构为单位执行聚类的单元。3d聚类单元是考虑高度信息z,在x-y-z平面中执行聚类的单元。
68.在步骤140之后,形状分析单元350可以利用通过聚类点云获得的lidar点来分析物体的形状,并且可以通过输出端out1将分析结果输出到物体跟踪单元(跟踪单元、跟踪和分类单元或物体检测单元)(步骤150)。例如,形状分析单元350利用聚类单元340的聚类结果生成关于每个通道的多个分段框的信息。这里,分段框可以是将聚类结果转换为几何框形状的结果。此外,关于分段框的信息可以是分段框的宽度、长度、位置或方向(或朝向)中的至少一个。
69.物体跟踪单元在每个通道的多个分段框中,选择与当前时刻正在跟踪的物体(以下称为“目标物体”)相关的分段框。这里,术语“相关”是根据lidar传感器310的可见度和物体的形状,在针对同一物体获得的关于分段框的多条信息中,选择要用于继续跟踪当前正在跟踪的物体的框的过程。所述相关可以在预定周期执行。
70.为了从形状分析单元350的每个通道提供的多个分段框中选择相关的分段框,物体跟踪单元可以将关于多个分段框中的每个分段框的信息转换为预定格式,并且可以从具有转换格式的多个分段框(或元对象的分段框)中选择相关的分段框。
71.下面将描述的根据本发明的示例性实施方案的物体跟踪方法不限于步骤140中的聚类过程和步骤150中的形状分析过程中的每个的具体执行方法。
72.在车辆行驶区域内可能存在物体和地面(或路面),可能要求确定lidar点是与物体相关的点(以下称为“物体点”)还是与地面相关的点(以下称为“地面点”)。这可以由图2所示的预处理单元320执行,但是示例性实施方案不限于此。下面将参考附图对此进行详细描述。
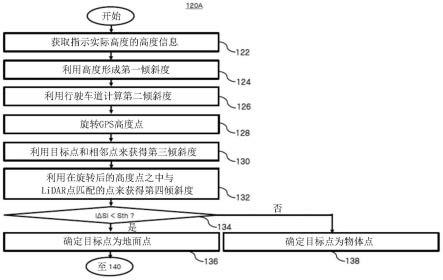
73.图3是示出根据本发明的示例性实施方案的物体跟踪方法120a的流程图。
74.图3所示的物体跟踪方法120a可以在图1所示的步骤120中执行,但是示例性实施方案不限于此。
75.首先,获取表示车辆行驶区域的实际高度(或高度)的信息(以下称为“高度信息”)(步骤122)。尽管步骤122示出为在执行图1所示的步骤110之后执行,但是示例性实施方案不限于此。也就是说,根据本发明的另一示例性实施方案,步骤122可以在执行步骤110之前执行,或者可以与步骤110同时执行。
76.图4是示出图3所示的步骤122的示例性实施方案122a的流程图。
77.图5是用于帮助理解图4所示的步骤122a的示意图。
78.根据获取高度信息的步骤122的示例性实施方案122a,可以获取车辆行驶区域的全球定位系统(gps)高度点(步骤210)。这里,gps高度点可以与指示车辆行驶区域的实际高度的多个实际高度点相对应。例如,可以利用从地图制作商发送到本车的gps信号来获取gps高度点。
79.gps高度点是基于本车所在的地面,指示存在于车辆行驶区域内的物体或地面的实际高度的点。
80.例如,参考图5,可以获取基于车辆行驶区域内的本车的位置x0的落入+x轴方向的预定范围(例如,100m的范围)内的gps高度点rp1至rp8,以及基于车辆行驶区域内的本车的
位置x0的落入-x轴方向的预定范围(例如,100m的范围)内的gps高度点rp9至rp15。
81.在步骤210,生成这样的点,即指示位于车辆行驶区域内的gps高度点之间的区域的高度的点(步骤212)。也就是说,由于对于存在于gps高度点之间的区域不存在gps高度点,因此可以利用插值来生成指示存在于gps高度点之间的区域的高度的点(以下称为“插值的高度点”)。例如,可以通过执行以1m为单位的插值来获得存在于gps高度点rp1至rp15之间的区域的插值的高度点。从图5中可以看出,利用相邻的gps高度点(例如,rp14和rp15)之间的插值来生成多个插值的高度点(例如,ip)。
82.如上所述,在步骤122获取的高度信息可以包括gps高度点(例如,rp1至rp15)或插值的高度点(例如,小于图5所示的实际高度点的点ip)中的至少一些。也就是说,在步骤122获取的高度信息可以包括gps高度点和插值的高度点两者,可以仅包括gps高度点,或者可以仅包括插值的高度点。
83.以下,在步骤122获取的高度信息将称为必须包括gps高度点,但是示例性实施方案不限于此。
84.再次参考图3,在步骤122之后,基于车辆行驶区域的高度信息来形成第一倾斜度(步骤124)。这里,第一倾斜度可以是相对于车辆行驶区域内包括的地面的倾斜度。
85.图6是用于帮助理解图3所示的步骤124的示例性实施方案124a的流程图。
86.图7是用于帮助理解图3所示的步骤124至128的示意图,其示出本车的位置ap,lidar点ldp表示为黑点,gps高度点rp表示为位于第一线段l1的大点,插值的高度点ip表示为比第一线段l1中的gps高度点rp更小的点。
87.参考图6,在步骤122之后,在车辆行驶区域内选择位于以本车为中心的第一距离内的区域(以下称为“第一检查目标区域”)(步骤222)。例如,参考图7,可以选择位于以本车的位置ap为中心的第一距离(例如,10m)内的区域(-10m至+10m之间的区域)作为车辆行驶区域内的第一检查目标区域。
88.在步骤222之后,可以基于存在于第一检查目标区域内的高度信息(即gps高度点或插值的高度点中的至少一些)来形成第一倾斜度(步骤224)。例如,参考图7,第一倾斜度s1(或具有第一倾斜度s1的第一线段l1)可以利用存在于第一检查目标区域内的gps高度点rp和插值的高度点ip来形成。
89.再次参考图3,在步骤124之后,可以利用在步骤110获取的lidar点之中与行驶车道相关的lidar点来确定车辆行驶区域的第二倾斜度(步骤126)。这里,第二倾斜度可以是相对于车辆行驶区域内包括的地面的倾斜度。
90.尽管图3中示出步骤126是在步骤124之后执行的,但是示例性实施方案不限于此。根据本发明的另一示例性实施方案,步骤126可以在执行步骤122之后且在执行步骤124之前执行,或者可以与步骤124同时执行。
91.图8是用于帮助理解图3所示的步骤126的示例性实施方案126a的流程图。
92.参考图8,在步骤124之后,检测在步骤110获取的lidar点之中与行驶车道相对应的lidar点(步骤230)。
93.图9是示出图8所示的步骤230的示例性实施方案230a的流程图。
94.参考图9,在步骤124之后,在步骤110获取的lidar点之中,选择存在于以本车为中心的预定距离(例如,1.5m)内的lidar点(步骤232)。
95.在步骤232之后,在选择出的存在于预定距离内的lidar点之中选择具有相对高强度的lidar点(步骤234)。这里,相对高强度可以是例如大于存在于车辆行驶区域内的lidar点的强度的平均值或中间值的强度,但是示例性实施方案不限于此。
96.在步骤234之后,在选择出的具有相对高强度的lidar点之中,选择具有线性性质的lidar点作为与行驶车道相对应的lidar点(步骤236)。
97.检测lidar点之中与行驶车道相对应的lidar点的方法可以以各种方式中的任何一种来执行,而不限于图9所示的方式。提取与行驶车道相关的点的方法的另一示例包括在韩国专利公开出版物no.10-2019-0049009(标题为“车辆及其控制方法”)中。
98.再次参考图8,在步骤230之后,在车辆行驶区域内选择位于以本车为中心的第二距离内的区域(以下称为“第二检查目标区域”)(步骤240)。例如,可以选择位于以本车的位置ap为中心的第二距离(例如,10m)内的区域(-10m至+10m之间的区域)作为车辆行驶区域内的第二检查目标区域。
99.根据本发明的示例性实施方案,第一距离与第二距离可以彼此相同或不同。第一距离与第二距离之间的差可以是预定值,并且该预定值可以用实验方法预先设置。然而,示例性实施方案不限于特定的预定值或获得预定值的特定方法。
100.图10是用于帮助理解图8所示的步骤250的示意图。
101.在步骤240之后,利用在步骤230检测到的与行驶车道相对应的lidar点之中,存在于在步骤240选择出的第二检查目标区域内的lidar点来确定第二倾斜度(步骤250)。例如,参考图10,可以利用存在于第二检查目标区域内并与行驶车道相对应的选择出的lidar点ldp1和ldp2来确定第二倾斜度。
102.再次参考图3,在步骤126之后,利用第一倾斜度s1和第二倾斜度来旋转gps高度点(步骤128)。例如,可以将第一倾斜度s1与第二倾斜度相加以执行步骤128。即,在步骤128中旋转后的gps高度点可以形成相当于第一倾斜度与第二倾斜度之和的倾斜度。
103.为了更好地理解,参考图7,具有相当于第一线段l1的第一倾斜度s1与第二倾斜度s2之和的倾斜度的第三线段l3可以与旋转后的gps高度点相对应。即,通过执行步骤128,可以获得第三线段l3,所述第三线段l3是沿箭头ar的方向旋转第一线段l1的结果。
104.在步骤128之后,利用存在于车辆行驶区域内的lidar点之中的目标点和相邻点来获得第三倾斜度s3(步骤130)。这里,目标点是由lidar传感器310获取的lidar点之中的要检查的点,以确定该点是与地面点相对应还是与物体点相对应。此外,相邻点是属于与目标点所属的某一层(以下称为“当前层”)相邻的层(以下称为“前一层”)的点。
105.图11是作为示例示出目标点和相邻点的示意图。
106.参考图11,目标点以“p
cur”表示,x
cur
、y
cur
和z
cur
分别表示目标点p
cur
的x轴、y轴和z轴坐标。此外,相邻点以“p
prev”表示,x
prev
、y
prev
和z
prev
分别表示相邻点p
prev
的x轴、y轴和z轴坐标。
107.图12a和图12b是用于帮助理解图3所示的步骤130至138的示意图。这里,附图标记“g”表示本车所在的地面。
108.如图12a所示,可以利用目标点p
cur
和相邻点p
prev
来获得第三倾斜度s3(步骤130)。
109.图13是用于帮助理解图3所示的步骤132的示意图。由于图13中的l1、l3和ldp具有与图7中相同的含义,因此采用相同的附图标记。这里,floor(x
prev
)表示通过对以下高度取
整获得的值,该高度是与相邻点p
prev
的x轴坐标相对应的第三线段l3的z轴值(以下称为“第一高度值”),floor(x
cur
)表示通过对以下高度取整获得的值,该高度是与目标点p
cur
的x轴坐标相对应的第三线段l3的z轴值(以下称为“第二高度值”)。
110.在步骤130之后,利用在旋转后的gps高度点之中与lidar点匹配的点来获得第四倾斜度s4(步骤132)。包括旋转后的gps高度点的第三线段l3的第一和第二高度值是与lidar点匹配的点。也就是说,参考图13,第一高度值与第三线段l3中与目标点p
cur
的x轴坐标匹配的点(即lidar点)的z轴值相对应,第二高度值与第三线段l3中与相邻点p
prev
的x轴坐标匹配的点(即,lidar点)的z轴值相对应。因此,可以利用第一高度值和第二高度值来获得第四倾斜度s4。第四倾斜度s4如图12b所示。
111.在步骤132之后,如利用以下等式1表示的,检查第三倾斜度s3与第四倾斜度s4之间的差的绝对值是否小于阈值倾斜度sth(步骤134)。
112.[等式1]
[0113]
|δs|《sth
[0114]
这里,δs表示第四倾斜度s4减去第三倾斜度s3的结果。
[0115]
例如,阈值倾斜度sth可以是0.5
°
,但是示例性实施方案不限于阈值倾斜度的特定值。
[0116]
如果绝对值小于阈值倾斜度sth,则确定出目标点是地面点(步骤136)。然而,如果绝对值不小于阈值倾斜度sth,则确定出目标点是物体点(步骤138)。
[0117]
如图3所示,步骤140可以在执行步骤136或步骤138之后执行,或者可以在执行其他预处理功能之后执行。
[0118]
以下,将参考附图来描述根据示例性实施方案的利用lidar传感器的物体跟踪装置。
[0119]
图14是根据本发明的示例性实施方案的利用lidar传感器的物体跟踪装置320a的框图。
[0120]
图14所示的物体跟踪装置320a可以包括在图2所示的预处理单元320中,但是示例性实施方案不限于此。
[0121]
尽管图3所示的物体跟踪方法120a将称为由图14所示的物体跟踪装置320a执行,但是示例性实施方案不限于此。即,根据本发明的另一示例性实施方案,图3所示的物体跟踪方法120a可以由与图14所示的物体跟踪装置320a不同地配置的物体跟踪装置来执行。此外,尽管图14所示的物体跟踪装置320a将称为执行图3所示的物体跟踪方法120a,但是示例性实施方案不限于此。
[0122]
高度信息获取单元322获取车辆行驶区域的高度信息,并将获取的高度信息输出到第一倾斜度获取单元324。即,高度信息获取单元322可以执行图3所示的步骤122。
[0123]
图15是图14所示的高度信息获取单元322的示例性实施方案322a的框图。高度信息获取单元322a可以包括gps高度获取单元410和高度点插值单元412。
[0124]
gps高度获取单元410可以获取车辆行驶区域的gps高度点,并且可以通过输出端out3将获取的gps高度点输出到高度点插值单元412和第一倾斜度获取单元324。即,gps高度获取单元410可以执行图4所示的步骤210。例如,gps高度获取单元410可以利用通过输入端in1接收到的gps信号来获取gps高度点。
[0125]
高度点插值单元412可以利用插值生成指示位于车辆行驶区域内的gps高度点之间的区域的高度的插值的高度点,并且可以通过输出端out4将生成的插值的高度点输出到第一倾斜度获取单元324。即,高度点插值单元412可以执行图4所示的步骤212。
[0126]
在本方式中,高度信息获取单元322(322a)可以获取包括gps高度点或插值的高度点中的至少一些的高度信息,并且可以将获取的高度信息输出到第一倾斜度获取单元324。
[0127]
同时,再次参考图14,第一倾斜度获取单元324可以利用车辆行驶区域的gps高度点来形成第一倾斜度s1,并且可以将第一倾斜度s1输出到高度点旋转单元328。或者,第一倾斜度获取单元324可以利用插值的高度点以及gps高度点来形成第一倾斜度s1。或者,第一倾斜度获取单元324可以利用插值的高度点而不是gps高度点来形成第一倾斜度s1。
[0128]
即,第一倾斜度获取单元324可以执行图3所示的步骤124。
[0129]
第二倾斜度获取单元326可以在由lidar传感器310获取并通过输入端in2接收到的lidar点之中检测与行驶车道相关的lidar点,可以利用检测到的与行驶车道相关的lidar点来确定第二倾斜度s2,并且可以将确定出的第二倾斜度s2输出到高度点旋转单元328。即,第二倾斜度获取单元326可以执行图3所示的步骤126。
[0130]
图16是图14所示的第二倾斜度获取单元326的示例性实施方案326a的框图。第二倾斜度获取单元326a可以包括点选择单元420和倾斜度计算单元422。
[0131]
点选择单元420可以从通过输入端in2接收到的lidar点之中选择与行驶车道相对应的lidar点,并且可以将选择出的lidar点输出到倾斜度计算单元422。即,点选择单元420可以执行图8所示的步骤230。
[0132]
图17是图16所示的点选择单元420的示例性实施方案420a的框图。点选择单元420a可以包括:距离检查单元430、强度检查单元432和线性度检查单元434。
[0133]
距离检查单元430可以从通过输入端in2接收到的lidar点之中选择存在于以本车为中心的预定距离内的lidar点,并且可以将选择出的lidar点输出到强度检查单元432。即,距离检查单元430可以执行图9所示的步骤232。
[0134]
强度检查单元432可以从选择出的存在于预定距离内的lidar点之中选择具有相对高强度的lidar点,并且可以将选择出的lidar点输出到线性度检查单元434。即,强度检查单元432可以执行图9所示的步骤234。
[0135]
线性度检查单元434可以从选择出的具有相对高强度的lidar点之中选择具有线性性质的lidar点作为与行驶车道相对应的lidar点,并且可以通过输出端out6将选择出的lidar点输出到倾斜度计算单元422。即,线性度检查单元434可以执行图9所示的步骤236。
[0136]
倾斜度计算单元422可以利用由点选择单元420选择出的lidar点来确定第二倾斜度s2,并且可以通过输出端out5将确定出的第二倾斜度s2输出到高度点旋转单元328。此时,倾斜度计算单元422可以仅利用由点选择单元420选择出的点之中属于第二检查目标区域的点来生成第二倾斜度s2。即,倾斜度计算单元422可以执行图8所示的步骤240和250。
[0137]
再次参考图14,高度点旋转单元328可以利用从第一倾斜度获取单元324提供的第一倾斜度s1和从第二倾斜度获取单元326提供的第二倾斜度s2来旋转gps高度点,并且可以将旋转后的gps高度点输出到第四倾斜度获取单元332。即,高度点旋转单元328可以执行图3所示的步骤128。
[0138]
图18是示出图14所示的高度点旋转单元328的示例性实施方案的框图。高度点旋
转单元328可以包括倾斜度合成单元328a。
[0139]
倾斜度合成单元328a可以将通过输入端in3接收到的第一倾斜度s1和第二倾斜度s2求和,并且可以通过输出端out7将由求和后的倾斜度形成的旋转后的gps高度点输出到第四倾斜度获取单元332。
[0140]
再次参考图14,第三倾斜度获取单元330可以利用通过输入端in2接收到的lidar点之中的目标点和相邻点来确定第三倾斜度s3,并且可以将确定出的第三倾斜度s3输出到比较单元334。即,第三倾斜度获取单元330配置为执行图3所示的步骤130。
[0141]
第四倾斜度获取单元332可以利用从高度点旋转单元328提供的旋转后的gps高度点之中与lidar点(即,目标点和相邻点)匹配的点来确定第四倾斜度s4,并且可以将确定出的第四倾斜度s4输出到比较单元334。如以上参考图3所示的步骤132所描述的,第四倾斜度获取单元332可以利用第一高度值和第二高度值来确定第四倾斜度s4。即,第四倾斜度获取单元332配置为执行图3所示的步骤132。
[0142]
比较单元334可以将第三倾斜度s3与第四倾斜度s4之间的差的绝对值与阈值倾斜度sth进行比较,并且可以将比较结果输出到点属性确定单元336。即,比较单元334配置为执行图3所示的步骤134。这里,阈值倾斜度sth可以是0.5
°
。
[0143]
点属性确定单元336可以响应于比较单元334的比较结果来确定目标点是地面点还是物体点,并且可以通过输出端out2输出确定结果。即,点属性确定单元336配置为执行图3所示的步骤136和138。
[0144]
如上所述,图2所示的预处理单元320可以对获取的lidar点进行预处理,并且可以包括高度信息获取单元322、第一倾斜度获取单元324、第二倾斜度获取单元326、第三倾斜度获取单元330、第四倾斜度获取单元332、高度点旋转单元328、比较单元334和点属性确定单元336。
[0145]
同时,其中记录了用于执行利用lidar传感器310跟踪物体的方法的程序的计算机可读记录介质可以存储用于实现以下功能的程序:利用车辆行驶区域的gps高度点来形成第一倾斜度的功能,利用车辆的lidar点来检测行驶车道并利用检测到的行驶车道来确定第二倾斜度的功能,利用第一倾斜度和第二倾斜度来旋转gps高度点的功能,利用lidar点之中的目标点和属于与目标点所属的当前层相邻的前一层的相邻点来获得第三倾斜度的功能、利用在旋转后的gps高度点之中与lidar点匹配的点来获得第四倾斜度的功能、以及当第三倾斜度与第四倾斜度之间的差的绝对值小于阈值倾斜度时确定目标点为地面点的功能。
[0146]
计算机可读记录介质包括其中存储配置为由计算机系统读取的数据的各种记录设备。计算机可读记录介质的示例包括:只读存储器(rom)、随机存取存储器(ram)、光盘rom(cd-rom)、磁带、软盘和光学数据存储器。计算机可读记录介质还可以分布在网络连接的计算机系统上,使得计算机可读代码以分布方式存储和执行。此外,用于实现物体跟踪方法的功能程序、代码和代码段可以由本发明的各个示例性实施方案所属领域的程序员容易地设计。
[0147]
以下,将参考附图来描述根据比较性示例的物体跟踪方法和根据示例性实施方案的物体跟踪方法。
[0148]
在比较性示例的情况下,利用由lidar传感器理论计算的点信息和任意确定的倾
斜度信息来构造表,并且利用该表来确定lidar点是地面点还是物体点。比较性示例的示例包括在韩国专利公开出版物no.10-2019-0064798(标题为“利用lidar的路面检测系统和利用该系统的路面检测方法”)中。
[0149]
相反,根据本发明的示例性实施方案,利用第一倾斜度s1和第二倾斜度s2来旋转gps高度点,以生成包括旋转后的gps高度点的第三线段l3,利用目标点和lidar点的相邻点来生成第三倾斜度s3,利用与lidar点匹配的第三线段l3的点来生成第四倾斜度s4,将第三倾斜度s3与第四倾斜度s4之间的差值与阈值倾斜度sth进行比较,并利用比较结果来检查lidar点是与物体点相对应还是与地面点相对应。
[0150]
图19a、图19b和图19c示出了当车辆行驶区域内包括上坡路时,利用根据比较性示例和示例性实施方案的物体跟踪方法和装置获取的结果。这里,在图19b和图19c所示的点中,具有相对小灰度的点表示物体点,并且具有相对大灰度的点表示地面点。这里,由于灰度较小,所以颜色接近黑色。
[0151]
在比较性示例的情况下,参考图19b中的圆形虚线502和504,将与物体相对应的lidar点错误地确定为与地面相对应的lidar点,从而表示物体的lidar点的数量较少,因此物体的形状没有明显地显现出来。例如,将表示位于图19b所示的圆形虚线504中的两个物体之中的左侧物体的侧面的一些lidar点错误地确定为与地面相对应的lidar点。
[0152]
相反,表示位于图19c的圆形虚线506中的物体的lidar点的数量(即通过利用图19a所示的第三线段l3的示例性实施方案获得的结果)大于表示位于图19b的圆形虚线502中的物体的lidar点的数量(即通过比较性示例获得的结果)。在位于图19c所示的圆形虚线508中的两个物体之中位于左侧物体的侧面的lidar点的数量(即通过本发明的示例性实施方案获得的结果)大于位于图19b的圆形虚线504中的左侧物体的侧面的lidar点的数量(即通过比较性示例获得的结果),因此物体的形状看起来比在比较性示例中更清楚。
[0153]
图20a、图20b和图20c示出了当车辆行驶区域中包括下坡路时,利用根据比较性示例和示例性实施方案的物体跟踪方法和装置获得的结果。这里,在图20b和图20c所示的点之中,具有相对小灰度的点表示物体点,并且具有相对大灰度的点表示地面点。
[0154]
在比较性示例的情况下,参考图20b中的圆形虚线512、514和516,将与物体相对应的lidar点错误地确定为与地面相对应的lidar点,从而表示物体的lidar点的数量较少,因此物体的形状没有明显地显现出来。例如,将表示位于图20b所示的圆形虚线516中的四个物体的一些lidar点错误地确定为与地面相对应的lidar点。
[0155]
相反,与位于图20c的圆形虚线522、524和526中的物体相对应的lidar点的数量(即通过利用图20a所示的第三线段l3的示例性实施方案获得的结果)大于与位于图20b的圆形虚线512、514和516中的物体相对应的lidar点的数量(即通过比较性示例获得的结果)。
[0156]
图21a、图21b和图21c示出了当车辆行驶区域中不包括上坡路和下坡路时,利用根据比较性示例和示例性实施方案的物体跟踪方法和装置获取的结果。这里,在图21b和图21c所示的点之中,具有相对小灰度的点表示物体点,并且具有相对大灰度的点表示地面点。
[0157]
在比较性示例的情况下,参考图21b中的圆形虚线532,将与物体相对应的lidar点错误地确定为与地面相对应的lidar点,从而表示物体的lidar点的数量较少,因此物体的
形状没有明显地显现出来。例如,将表示位于图21b所示的圆形虚线532中的两个物体的lidar点错误地确定为与地面相对应的lidar点。
[0158]
相反,与位于图21c的圆形虚线542中的两个物体相对应的lidar点的数量(即通过利用图21a所示的第三线段l3的示例性实施方案获得的结果)大于与位于图21b的圆形虚线532中的物体相对应的lidar点的数量(即通过比较性示例获得的结果)。
[0159]
如上所述,根据本发明的示例性实施方案,可以准确地确定lidar点是地面点还是物体点,因此表示物体的lidar点的数量比比较性示例中的更多,从而便于更准确地跟踪物体。
[0160]
此外,在比较性示例的情况下,在确定lidar点是地面点还是物体点时,确定会受到实际行驶状态和道路环境的影响,并且执行时间较长。在比较性示例的情况下(其中lidar点是地面点还是物体点利用表格来确定),物体跟踪性能会受到车辆状态或道路不平坦或倾斜的程度的影响。
[0161]
相反,该示例性实施方案实时地利用作为实际道路的高度信息的gps高度点,比比较性示例更准确地确定lidar点是地面点还是物体点,同时受到实际的行驶状态和外部环境(例如,路况)的影响更小,并且仅通过比较倾斜度来实现确定,因此比比较性示例缩短了执行时间。
[0162]
从以上描述显然的是,根据配置为利用lidar传感器跟踪物体的方法和装置以及存储执行根据实施方案的方法的程序的记录介质,可以准确地确定lidar点是与地面相对应的点还是与物体相对应的点,增加了表示物体的lidar点的数量,从而有助于更准确地跟踪物体。此外,该示例性实施方案实时地利用实际道路的高度信息,更准确地确定lidar点是与地面相对应的点还是与物体相对应的点,同时受到实际的行驶状态和外部环境(例如,路况)影响较小,从而缩短了执行时间。
[0163]
然而,通过本发明能够实现的效果不限于上述效果,并且本领域的技术人员通过以上描述将清楚地理解本文中未提及的其他效果。
[0164]
在不脱离本发明的范围的情况下上述各个实施方案可以彼此组合,除非它们彼此不相容。
[0165]
此外,对于在各种实施方案中的任何一个中未详细描述的任何元件或过程,除非另有说明,否则可以参考在另一示例性实施方案中具有相同附图标记的元件或过程的描述。
[0166]
为了方便解释和精确限定所附权利要求,术语“上”、“下”、“里面”、“外面”、“上面”、“下面”、“向上”、“向下”、“前”、“后”、“背面”、“内”、“外”、“内部”、“外部”、“内部的”、“外部的”、“内侧”、“外侧”、“向前”、“向后”被用于参考附图中所显示的这些特征的位置来描述示例性实施方案的特征。将进一步理解的是,术语“连接”或其衍生词指代直接连接和间接连接。
[0167]
前面出于说明和描述的目的呈现了对本发明具体示例性实施方案的描述。它们并不旨在详尽的或将本发明限制于公开的精确的实施方案,并且显然的是,根据以上教导可以进行一些修改和变化。选择示例性实施方案并进行描述是为了解释本发明的特定原理及其实际应用,从而使得本领域的其它技术人员能够实现并利用本发明的各种示例性实施方案以及其各种替代形式和修改形式。本发明的范围旨在由所附权利要求及其等同形式来限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1