基于因子图的气压辅助Wi-Fi/PDR室内定位方法
基于因子图的气压辅助wi-fi/pdr室内定位方法
技术领域
1.本发明属于室内导航定位技术领域,涉及基于因子图的多源信息融合方法,具体涉及基于因子图的气压辅助wi-fi/pdr室内定位方法。
背景技术:
2.由于单一定位源无法满足室内定位的定位精度和稳定性的要求,因此采用多源信息融合方法,对多种定位信息进行组合是目前室内定位技术中增强定位的鲁棒性和准确度的主要手段之一。凭借着低计算量和高准确率的优势,以卡尔曼滤波器为代表的滤波方法在实时性要求高的多源融合定位领域中占有一席之地。
3.不同于基于马尔科夫假设的卡尔曼滤波只依靠上一时刻的状态进行估计,图优化方法能够对之前数据的整体或局部进行非线性优化,只要计算资源允许,往往能取得比滤波器技术更高的优化精度。而近年来随着云计算、物联网的兴起,大规模计算成为可能,以因子图为代表的优化方法逐渐被应用到导航定位、地图构建等领域中,在诸如无人驾驶、智能物流等方面起到了不可小视的作用。因子图是一种信息传递模型,能通过双向图刻画被因式分解为若干局部函数乘积形式的全局函数。基于因子图的室内多源融合定位方法本质上是贝叶斯网络最大后验估计,能够完成多种定位方法的动态融合,可应对传感器输出频率不同以及量测信息丢失的情况,实现即插即用,十分灵活。
4.目前大部分多源信息融合方法基于联邦滤波器,应对采样频率各异的量测量时,为了保证各子系统时间一致通常会舍去适量的量测信息;另一方面以ekf为代表的一系列滤波器建立在马尔科夫性假设成立的基础上,虽然极大地减少了计算复杂度,但也丢弃了许多重要的信息。对此,因子图可以在解决时间同步问题的同时,充分利用量测信息提高定位精度。
技术实现要素:
5.针对现有技术的不足,本发明提出了基于因子图的气压辅助wi-fi/pdr室内定位方法,使用信道状态信息(channel state information,csi)作为指纹数据,对行人轨迹推算(pedestrian dead reckoning,pdr)的各步骤进行改进,削弱惯性器件误差累积对定位的影响,并使用气压计,通过自身差分气压测高方法获得高度变化量,从而提高定位的精确度以及增强定位的鲁棒性。
6.基于因子图的气压辅助wi-fi/pdr室内定位方法,具体包括以下步骤:
7.步骤s1:在定位区域内布置定位装置。所述定位装置包括wi-fi设备、无线网卡、惯性器件模块和数字气压传感器。
8.所述wi-fi设备的信号覆盖定位区域,用于构建无线传感器网络,在离线阶段对定位区域进行网格划分,通过无线网卡传输采集的信道状态信息。根据wi-fi设备采集的数据与对应的位置坐标构建csi指纹库,训练定位神经网络预测位置坐标,然后利用广义延拓插值法进行csi指纹库扩充,得到插值指纹库。在i时刻定位神经网络根据csi信号输出的估计
位置经过插值指纹库的矫正后,得到用于输入因子图的坐标量测数据
9.所述惯性器件模块包含加速度计和陀螺仪,用于在定位过程中持续输出三轴加速度和航向角。所述数字气压传感器用于持续输出当前位置的气压值和气温。
10.步骤s2:改进pdr,构建步长模型,输出轨迹推算量测信息,具体包括以下步骤:
11.步骤s21:将惯性器件模块获取的载体坐标系下的三轴加速度a=[a
x a
y az]
t
,与旋转矩阵r左乘,得到载体坐标系的z轴竖直向下时的相对坐标系下的加速度a
′
:
[0012]a′
=[a
′
x a
′
y a
′z]
t
=ra
[0013][0014]
将a
′
z-g作为步伐检测的待检测量,其中g为当地的重力加速度,a
x
、ay、az分别为在载体坐标系下加速度沿x轴、y轴、z轴方向的分量,a
′
x
、a
′y、a
′z分别为在相对坐标系下加速度沿x轴、y轴、z轴方向的分量。α、β和γ分别是航向角、俯仰角和横滚角。
[0015]
对所有时刻的待检测量a
′
z-g进行峰值检测,将低于设定阈值的步伐点时刻滤除,得到步伐点时刻集合t
s1
。由于仅凭借峰值判断会将许多抖动造成的较大波峰也被计算在内,因此需要对步伐点时刻集合t
s1
进行二次筛选。一般来说人在正常步行过程中步频存在上限,且行进中竖直方向上产生的最大瞬时加速度是由脚步落地造成的,据此提出两个合理假设:
[0016]
①
在最短步伐用时内至多只有一个步伐点;
[0017]
②
在最短步伐用时中如果出现多个步伐点,则取待检测量最大的为该区间的唯一步伐点。
[0018]
根据上述两个假设,对步伐点集合t
s1
进一步筛选,记τ为最短步伐用时,为τ时间内第j个步伐点时刻,则二次筛选后的步伐点集合t
s2
中的元素满足如下条件:
[0019][0020]
步骤s22:建立步长与加速度的对数模型,w和b为模型系数,具体如下所示:
[0021]
f(w,b)=w
·
log(a
′z(t)-g)+b,t∈t
s2
[0022]
收集多次不同速度与不同路线下惯性器件模块输出的数据,构建轨迹推算训练数据集其中为行走步数,s
ii
为行走路程,m为数据量。
[0023]
采用高斯-牛顿迭代法优化步长与加速度对数模型中的参数,使得路程残差平方和最小,优化公式为:
[0024][0025]
其中,为第ii条训练数据的第jj步估计步长。
[0026]
步骤s23:陀螺仪的航向角取值范围一般为[0,360
°
),在对航向角数据进行滤波处
理的过程中,容易遇到在范围边界处来回跳变的情况,仅仅是一次越过边界的跳变也会对滤波结果造成严重影响。因此需要对航向角数据进行处理,当后一时刻的航向角αk减去前一时刻航向角的绝对值大于180
°
,可以认为发生了跳变,具体处理方法为:
[0027][0028][0029]
其中,表示经过处理后的航向角,
[0030]
采用双线性变换法设计iir滤波器,对经过处理后的航向角进行低通滤波。
[0031]
步骤s24:记stepleni为i时刻的估计步长,得到用于输入因子图的pdr量测信息
[0032][0033][0034]
步骤s3:在实际应用中,由于数字气压传感器中空气流通不畅等原因引起的气压量测突变,会降低定位精度,针对这个现象提出一种基于广义延拓外推法的突变过滤方法,用于检测并替换气压量测中的突变点。
[0035]
步骤s31:收集一组时间序列气压数据计算l个广义延拓外推模型:
[0036][0037]
式中,为拟合函数的系数,对于第l个模型采用t
m-l
至t
n-l
时段的数据计算拟合系数,每个模型数据量均为固定的n-m+1个,利用上述l个广义延拓外推模型估计t
n+1
时刻的气压值
[0038][0039][0040]
步骤s32:数字气压传感器输出的量测数据的标准差为σ,显著性水平为a,a=0.05,通过标准正态分布表得到检验统计量z
a/2
,通过广义延拓预测值估计气压真值然后通过设定的置信区间判断数字气压传感器输出的量测数据是否为突变点,当量测数据超出置信区间,认为该量测数据发生了突变,并用估计的气压真值替换该值。
[0041]
步骤s33:依据差分气压转换高度公式,计算i时刻差分高度值作为输入因
子图的差分气压高度量测信息
[0042][0043]
其中,为当前气温,与分为经过步骤s32过滤后相邻两个时刻的气压值。
[0044]
步骤s4:将步骤s1~s3得到的量测输入因子图模型。因子图的状态量为x=[x y z α
′
]
t
,包括三轴坐标值x、y、z与航向角α
′
,依据输入的新的量测信息类型构建新的因子节点,并依次进行扩展结构、增量更新、变量消元,然后进行图优化,优化目标函数为:
[0045][0046][0047][0048]
其中,为量测误差协方差矩阵,||
·
||r为求取马氏距离,δ表示求取相邻时刻变量节点的状态量差值。
[0049]
最后,得到优化后的因子图状态量x,将其中的三轴坐标值作为输出的定位结果。
[0050]
本发明具有以下有益效果:
[0051]
1、利用在大部分室内广泛分布的wi-fi设备以及智能终端中易于取得的惯性器件和气压计,进行多源融合导航定位,采用因子图保证在各设备输出的量测信息更新频率不一致的情况下,依然能够充分利用量测信息提高定位的准确率和稳定性。
[0052]
2、对行人轨迹推算方法进行改进,使用峰值检测和步伐点滤除方法进行步伐检测,使用高斯-牛顿迭代法计算对数模型参数实现步长估计,采用跳变消除法和iir滤波处理航向角数据,进一步缩小轨迹推算结果的误差。
[0053]
3、引入基于广义延拓外推法的突变过滤法,增强判断的鲁棒性,滤除并替换气压数据中的突变值。
附图说明
[0054]
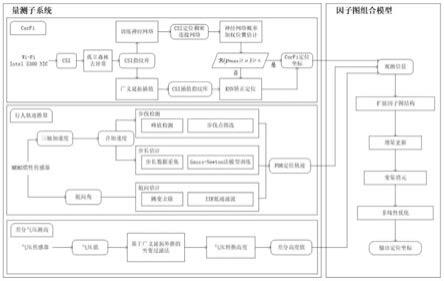
图1是基于因子图的气压辅助wi-fi/pdr室内定位方法框图;
[0055]
图2是wi-fi/pdr和气压计辅助的因子图结构图;
[0056]
图3是基于因子图的wi-fi/pdr和气压计辅助的室内定位方法实验轨迹图;
[0057]
图4是不同融合方法的定位误差累积概率分布图。
具体实施方式
[0058]
以下结合附图对本发明作进一步的解释说明;
[0059]
如图1所示,本方法涉及wi-fi、pdr和气压,构建了利用结合稠密连接网络的csi矫
正定位方法、pdr以及差分气压测高法结果的因子图模型,如图2所示,因子图的结构使其具有很高的可扩展性,可以灵活地组合不同量测频率的传感器,也可以应对传感器暂时不可用或者新的传感器信息引入的情况,实现即插即用的功能。
[0060]
由于在大部分室内环境中都部署有大量的wi-fi设备,因此基于wi-fi信号的定位技术能以较低的成本取得不错的定位效果,使用csi作为指纹数据,相较于rssi(received signal strength indicator,接收信号强度),具有更好的细粒度与更强的稳定性。
[0061]
pdr一般包括三个步骤,分别是步伐检测、步长估计和航向估计,通过改进各步骤方法可以削弱惯性器件误差累积对定位的影响,进一步提高pdr的定位精度。本方法首先提出两个假设,并在此基础上使用峰值检测和步伐点滤除方法进行步伐检测;在步长估计问题中使用高斯-牛顿迭代法计算对数模型参数;在方向估计中采用跳变消除法和iir滤波处理航向角数据,得到的行人轨迹结果较改进前误差更小。
[0062]
大气压强是大气状态的一项关键指标,气压能在一定程度上反应对应压强下的高度,为了避免时间尺度为天或年的周期性气压波动,以及与天气密切相关的随机气压波动削弱气压测高的准确性和稳定性,基于广义延拓外推法的突变过滤法,使用多次外推结果增强判断的鲁棒性,滤除并替换气压数据中的突变值,采用自身差分气压测高方法获得高度变化量,可以增强定位的鲁棒性。
[0063]
本实施例在办公楼的四楼、五楼与楼梯间区域进行设备部属与数据采集,实现室内定位。使用的接收终端为配备iwl 5300nic无线网卡的华硕fx50jx笔记本电脑,wi-fi设备为小米路由器4c,数字气压传感器的型号为bmp388,惯性器件模块的型号为lins16460。
[0064]
步骤一、在定位区域内部属定位装置,并划分网格,然后在各个训练节点处采集csi,记录对应的坐标搭建csi指纹库,根据csi指纹库训练神经网络进行位置分类。然后对csi指纹库做平均处理并使用广义延拓插值法扩充,构建用于矫正的插值指纹库。然后采集惯性器件模块在不同速度、不同路线下输出的数据,构成训练数据集,采用高斯-牛顿迭代法计算步长模型参数,得到步长估计模型。
[0065]
步骤二、安排实验人员携带惯性器件模块匀速步行,行进路线为在四楼走廊按逆时针方向行走,通过楼梯到达五楼走廊后按顺时针方向行走,在走廊的行走轨迹均为矩形。
[0066]
s2.1、将实时采集到的csi输入步骤一训练好的神经网络得到估计坐标,采用插值指纹库和k近邻对估计坐标进行矫正,然后将矫正后的定位坐标输入因子图模型。
[0067]
s2.2、对惯性器件模块输出的三轴加速度进行步伐点提取,并建立步长与加速度的对数模型对步长进行估计。然后对跳变的航向角数据进行处理与低通滤波,再将pdr量测信息输入因子图模型。
[0068]
s2.3、采用基于广义延拓外推法的突变过滤方法处理数字气压传感器输出的数据,并将其转换为差分高度后再输入因子图模型。
[0069]
步骤三、依据步骤二处理后的量测信息,在因子图模型中新建对应的因子节点,然后进行结构拓展、增量更新、变量消元后,对因子图进行非线性优化求解当前的变量状态,并输出定位坐标,最终结果如图3所示,图中黑色实线为参考轨迹,带圆虚线为因子图定位轨迹,朝向为左箭头指向开始方向,朝向为右箭头指向结束方向。
[0070]
与采用卡尔曼滤波器和联邦滤波器替换因子图进行对比,不同融合方法的定位误差累积概率分布如图4所示,本方法最终取得的平均定位误差为0.291m,相比于使用卡尔曼
滤波器和联邦滤波器为多源融合算法,平均定位误差分别减小了42.9%和40.3%。
[0071]
最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制,所属领域的普通技术人员应当理解;依然可以对本发明的方案进行修改或者是部分技术的替换,凡非用于限制本发明的专利保护范围,本发明保护范围依然以权利要求书为准;凡是采用本发明附图内容或者是说明书所做的类似结构变动,同理均应该包含在该专利的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1