1.本发明涉及锂电池电芯检测技术领域,特别涉及一种锂电芯全自动在线无损检测方法。
背景技术:2.锂离子二次充电电池的组成是这样的:电芯+保护电路板。充电电池去除保护电路板就是电芯了。他是充电电池中的蓄电部分。电芯的质量直接决定了充电电池的质量。
3.伴随着国家对环保事业的重视,新能源行业受益匪浅。尤其是新能源汽车的锂离子动力电池的产能和供能都呈现上升增涨,锂离子动力电池因存储电量大,且寿命较长等特点是现有的电池使用最广泛的一种。锂离子电芯核心制造工艺分为叠片工艺和卷绕工艺。卷绕电芯因为生产控制简单,工厂产量大,市场普及程度高。
4.现有的锂电池检测存在需要将电芯抓取、吸取或翻转的动作。当x摄像检测时,裸电芯还未进行封顶工艺(热封装),抓取裸电芯易造成隔离膜的损伤和极耳的变形;裸电芯被抓取的过程,增加了整机动作,延长了的整机节拍;同时卷绕电芯存在x射线侧面成像模糊,软件算法不能识别,裸电芯卷绕层数越多,成像越模糊,软件识别越困难。在后续加工封装中,卷绕电芯的微小的误差也会造成锂电池的稳定性。
技术实现要素:5.本发明的主要目的是提出一种锂电芯全自动在线无损检测方法,旨在通过改变裸电芯的检测方式,避免了抓取损伤电芯,同时通过改变软件算法,提高裸电芯的检测精准度。
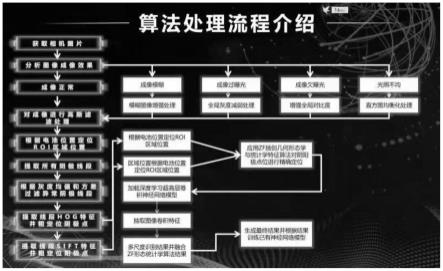
6.为实现上述目的,本发明提出一种锂电芯全自动在线无损检测方法,包括:s1:将裸电芯放置于托盘上,取料夹爪将托盘夹持至来料输送线上;s2:来料输送线将托盘输送至扫码工位并停止,扫码工位获取电池条码;s3:获取电池条码后输送至检测装置上,其中检测装置包括微焦点应用动态探测器和微焦点x射线源;s4:微焦点x射线源发射x射线,x射线穿透裸电芯第1个角或依次扫描剩余角,微焦点应用动态探测器获取图像数据进行本底矫正、增益矫正、缺陷矫正,而后再传输至工控机,进行算法流程;s5:算法流程:1、首先分析图像成像效果,并对其判断是否符合;2、当正常状态时,将图像进行高斯滤波处理;3、图像进行高斯滤波处理后获取相应像素值;4、根据电池位置获取roi区域位置,即利用mask掩模技术提取纯色背景图像roi区域中的裸电芯阴极线段;
5、根据灰度均值和方差过滤异常阴极线段;6、提取阴极线段方向梯度直方图,并初步定位阴极线段的端点;7、提取阴极线段的sift特征并初步定位阳极线段的端点;s6:根据s5中步骤6和7,抽取图像卷曲特征,多尺度识别结果,并融合zf形态统计学,计算出结果。
7.优选地,在s5中,1、首先对样本图片进行滤波操作,以降低噪点;2.计算过滤后图片的梯度方向和梯度幅值,并生成梯度图;3.根据梯度图片的灰度特征进行二值化操作。
8.优选地,s5中步骤2中,当图像正常时:1、成像模糊时,图像增强组件对图像进行图像增加处理;2、成像过度曝光时,全局灰度减弱处理;3、成像欠曝光时,增强全局对比度;4、光照不均匀时,直方图均衡化处理。
9.优选地,所示s5步骤6和7中:1.通过边缘提取,提取出阳极层间边缘;2.通过梯度线性回归方法,剔除非伸出部分的阳极和阴极边缘;3.基于2步剩下的边缘线条,通过kmean聚类分析计算出阳极的顶点。
10.优选地,所示s5步骤6和7中获取:
①
根据电池位置定位roi区域位置;
②
区域位置根据电池位置定位roi区域位置。
11.优选地,根据
①
和
②
,应用zf几何形态学和统计学算法对阴阳极点位精确定位。
12.优选地,精确定位后,加载深度学习超高层卷积神经网络模型,并抽取图形卷积特征,从而获取图像卷曲特征。
13.优选地,生成最终结果,并根据结果训练已有神经网络模型,获取数据库。
14.本发明技术方案在不接触电池的情况下,即不会造成裸电芯的损伤,通过托盘放置裸电芯,增加了机台工作效率(可以同时放置2个或多个),通过x射线对裸电芯直接照射,通过软件算法识别1个电池检测4个角的是否发生卷曲或层叠,避免了裸电芯的损伤。
附图说明
15.图1为本发明流程图;图2为s5中步骤6;图3为s5中步骤7;图4为合格图像第一实施例;图5为合格图像第二实施例;图6为不合格图像第一实施例;图7为不合格图像第二实施例。
具体实施方式
16.下面将结合附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于
本发明保护的范围。
17.需要说明,若本发明实施例中有涉及方向性指示(诸如上、下、左、右、前、后、顶、底、内、外、垂向、横向、纵向,逆时针、顺时针、周向、径向、轴向
……
),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
18.另外,若本发明实施例中有涉及“第一”或者“第二”等的描述,则该“第一”或者“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
19.如图1至6所示,一种锂电芯全自动在线无损检测方法,包括:s1:将裸电芯放置于托盘上,取料夹爪将托盘夹持至来料输送线上;s2:来料输送线将托盘输送至扫码工位并停止,扫码工位获取电池条码;s3:获取电池条码后输送至检测装置上,其中检测装置包括图像增强组件和平板探测器;s3:获取电池条码后输送至检测装置上,其中检测装置包括微焦点应用动态探测器和微焦点x射线源(从而获取多维图像);s4:微焦点x射线源发射x射线,x射线穿透裸电芯第1个角或依次扫描剩余角,微焦点应用动态探测器获取图像数据进行本底矫正、增益矫正、缺陷矫正,而后再传输至工控机,进行算法流程;s5:算法流程:1、首先分析图像成像效果,并对其判断是否符合;2、当正常状态时,将图像进行高斯滤波处理;3、图像进行高斯滤波处理后获取相应像素值;4、根据电池位置获取roi区域位置,即利用mask掩模技术提取纯色背景图像roi区域中的裸电芯阴极线段;5、根据灰度均值和方差过滤异常阴极线段;6、提取阴极线段方向梯度直方图,并初步定位阴极线段的端点;7、提取阴极线段的sift特征并初步定位阳极线段的端点;s6:根据s5中步骤6和7,抽取图像卷曲特征,多尺度识别结果,并融合zf形态统计学,计算出结果。
20.在本发明实施例中,在s5中,1、首先对样本图片进行滤波操作,以降低噪点;2.计算过滤后图片的梯度方向和梯度幅值,并生成梯度图;3.根据梯度图片的灰度特征进行二值化操作。
21.在本发明实施例中,s5中步骤2中,当图像正常时:1、成像模糊时,图像增强组件对图像进行图像增加处理(例如色彩度调整);2、成像过度曝光时,全局灰度减弱处理;
3、成像欠曝光时,增强全局对比度;4、光照不均匀时,直方图均衡化处理。
22.在本发明实施例中,所示s5步骤6和7中:1.通过边缘提取,提取出阳极层间边缘;2.通过梯度线性回归方法,剔除非伸出部分的阳极和阴极边缘;3.基于2步剩下的边缘线条,通过kmean聚类分析计算出阳极的顶点。
23.在本发明实施例中,所示s5步骤6和7中获取:
①
根据电池位置定位roi区域位置;
②
区域位置根据电池位置定位roi区域位置。
24.在本发明实施例中,根据
①
和
②
,应用zf几何形态学和统计学算法对阴阳极点位精确定位。
25.在本发明实施例中,精确定位后,加载深度学习超高层卷积神经网络模型,并抽取图形卷积特征,从而获取图像卷曲特征。
26.在本发明实施例中,生成最终结果,并根据结果训练已有神经网络模型,获取数据库。
27.高斯滤波是一种线性平滑滤波,适用于消除高斯噪声,广泛应用于图像处理的减噪过程。 高斯滤波就是对整幅图像进行加权平均的过程,每一个像素点的值,都由其本身和邻域内的其他像素值经过加权平均后得到。高斯滤波的具体操作是:用一个模板(或称卷积、掩模)扫描图像中的每一个像素,用模板确定的邻域内像素的加权平均灰度值去替代模板中心像素点的值。图像感兴趣区域(roi)提取利用mask(掩模)技术提取纯色背景图像roi区域中的电芯的阴极段和阳极段;1、cv.cvtcolor(img, cv.color_bgr2hsv)函数img为要进行色彩空间转换的原图cv.color_bgr2hsv即将原图rgb色彩空间转换为hsv色彩空间;2、 cv.inrange(hsv, (h_min, s_min, v_min), (h_max, s_max, v_max))函数,cv.inrange函数通过设置不同的h、s、v的min和max阈值可以获取不同色彩的一个二值的mask图;3、cv.bitwise_and(img1, img2, mask),cv.bitwise_or(img1, img2, mask)和cv.bitwise_not(img)第一个函数为按位与操作函数,将img1和img2在mask的区域内,r,g,b三个分量分别进行按位与操作。第二个函数为按位或操作函数,将img1和img2在mask的区域内,r,g,b三个分量分别进行按位或操作。第三个函数为按位取反操作函数,将img在r,g,b三个分量分别进行按位取反操作;4、cv.add(img1, img2)函数将img1和img2 进行相加操作,img1和img2的尺寸必须要相同。
28.hog)特征是一种在计算机视觉和图像处理中用来进行物体检测的特征描述子。它通过计算和统计图像局部区域的梯度方向直方图来构成特征。hog特征结合svm分类器已经被广泛应用于图像识别中,在一幅图像中,局部目标的表象和形状(appearance and shape)能够被梯度或边缘的方向密度分布很好地描述。(本质:梯度的统计信息,而梯度主要存在于边缘的地方)。首先将图像分成小的连通区域,我们把它叫细胞单元。然后采集细
胞单元中各像素点的梯度的或边缘的方向直方图。最后把这些直方图组合起来就可以构成特征描述器。把这些局部直方图在图像的更大的范围内(我们把它叫区间或block)进行对比度归一化(contrast-normalized),所采用的方法是:先计算各直方图在这个区间(block)中的密度,然后根据这个密度对区间中的各个细胞单元做归一化。通过这个归一化后,能对光照变化和阴影获得更好的效果。它对图像几何的和光学的形变都能保持很好的不变性,这两种形变只会出现在更大的空间领域上。其次,在粗的空域抽样、精细的方向抽样以及较强的局部光学归一化等条件下可以精确获取阴极段和阳极段。
29.hog特征提取方法就是将一个image(你要检测的目标或者扫描窗口):1)灰度化(将图像看做一个x,y,z(灰度)的三维图像);2)采用gamma校正法对输入图像进行颜色空间的标准化(归一化);目的是调节图像的对比度,降低图像局部的阴影和光照变化所造成的影响,同时可以抑制噪音的干扰;3)计算图像每个像素的梯度(包括大小和方向);主要是为了捕获轮廓信息,同时进一步弱化光照的干扰;4)将图像划分成小cells(例如6*6像素/cell);5)统计每个cell的梯度直方图(不同梯度的个数),即可形成每个cell的descriptor;6)将每几个cell组成一个block(例如3*3个cell/block),一个block内所有cell的特征descriptor串联起来便得到该block的hog特征descriptor。
30.7)将图像image内的所有block的hog特征descriptor串联起来就可以得到该image(你要检测的目标)的hog特征descriptor了。这个就是最终的可供分类使用的特征向量了。
31.(1)标准化gamma空间和颜色空间 为了减少光照因素的影响,首先需要将整个图像进行规范化(归一化)。在图像的纹理强度中,局部的表层曝光贡献的比重较大,所以,这种压缩处理能够有效地降低图像局部的阴影和光照变化。因为颜色信息作用不大,通常先转化为灰度图;(2)计算图像梯度计算图像横坐标和纵坐标方向的梯度,并据此计算每个像素位置的梯度方向值;求导操作不仅能够捕获轮廓,人影和一些纹理信息,还能进一步弱化光照的影响。
32.最常用的方法是:首先用[-1,0,1]梯度算子对原图像做卷积运算,得到x方向(水平方向,以向右为正方向)的梯度分量gradscalx,然后用[1,0,-1]t梯度算子对原图像做卷积运算,得到y方向(竖直方向,以向上为正方向)的梯度分量gradscaly。然后再用以上公式计算该像素点的梯度大小和方向。
[0033]
描述统计学是研究如何取得反映客观现象的数据,并通过图表形式对所搜集的数据进行加工处理和显示,进而通过综合概括与分析得出反映客观现象的规律性数量特征的一门学科。以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是在本发明的发明构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。