基于遥感图像的国土测绘方法及系统与流程
1.本发明涉及测绘技术领域,更具体的说是涉及一种基于遥感图像的国土测绘方法及系统。
背景技术:
2.从我国土地测绘工作开展的当前状况来看,我国在这方面的发展还不够完善,仍然存在着一定的不足,这些不足都会对广大群众造成一定的负面影响,所以我们要能够及时发现,及时解决。
3.尤其是,由于工程测绘数据的共享机制未完全建立,随着经济社会的快速发展,各企事业单位为满足自身建设和管理的需要,自筹资金组织施测,造成同一地区不同单位重复测绘的现象,导致工程测绘资源的严重浪费,而且还造成测绘基准不同、技术标准不一、成果质量不均等现象,特别是当前部分地方城市规划、城市建设、国土资源等部门根据部门需要进行测绘、更新不同比例尺的地图,出现重复投资、重复测量,造成了财政资金的浪费。
4.其中,由于测绘基准不同、技术标准不一导致出现误差,对于测量精度大打折扣。
5.因此,如何提供一种测量精度高的国土测绘方法及系统是本领域技术人员亟需解决的问题。
技术实现要素:
6.有鉴于此,本发明提供了一种基于遥感图像的国土测绘方法及系统。
7.为了实现上述目的,本发明提供如下技术方案:
8.基于遥感图像的国土测绘方法,具体步骤包括:
9.获取遥感图像,并对所述遥感图像进行预处理;
10.根据预处理后的遥感图像确定边界线并提取多个边界坐标;
11.根据所述边界坐标与原始的遥感图像中边界坐标之间的映射关系,对边界坐标进行修正;
12.利用修正后的边界坐标确定边界函数。
13.通过上述技术方案,本发明的技术效果在于,通过修正参数将预处理后的图像与原始图像建立关系,将测绘基准不同、技术标准不一问题,得以解决。
14.可选的,在上述的一种基于遥感图像的国土测绘方法中,所述预处理包括:对原始的遥感图像进行重采样,设原图像为f,图像每个像元大小为宽为w、高为h,图像的尺寸为m
×
n个像元;向下重采样后的图像为g,图像每个像元的大小为w/k1、h/k1,图像的尺寸为k1*m
×
k2*n;其中k1,k2均为大于1的整数。
15.进一步,一般情况下k1、k2取相同,且取均3较为适宜。
16.可选的,在上述的一种基于遥感图像的国土测绘方法中,确定边界线并提取多个边界坐标具体步骤如下:
17.初步提取预处理后的遥感图像的边界线,通过构建长宽分别为x、y个像素的矩形,
并以此矩形对预处理后的遥感图像进行裁剪,获得边界区域;
18.再对所述边界区域的影像图采用双边滤波法进行影像滤波,滤波完成后,将得到滤波影像图;
19.其中所述滤波影像图的中心点坐标即为边界线上的边界坐标。
20.可选的,在上述的一种基于遥感图像的国土测绘方法中,进行修正前,还包括异常边界坐标的剔除,具体步骤包括:
21.在所述边界区域构建坐标系;
22.计算中心点与边界线的距离,所述距离在预设误差内,则判断所述中心点为边界坐标点,否则剔除;
23.剔除所述异常边界坐标,重新构建长宽分别为x、y个像素的矩形,并以此矩形对预处理后的遥感图像进行裁剪,获得第二边界区域;
24.利用所述第二边界区域代替异常边界坐标所在的边界区域。
25.可选的,在上述的一种基于遥感图像的国土测绘方法中,根据所述边界坐标与原始的遥感图像中边界坐标之间的映射关系具体步骤如下:
26.获取边界区域四个顶点坐标和原始的遥感图像中对应边界区域的顶点坐标;
27.边界区域四个顶点坐标分别是a(x1,y1),b(x2,y2),c(x3,y3),d(x4,y4);
28.原始的遥感图像中对应边界区域的顶点坐标分别是a
′
(x
′1′
,y
′1′
),b
′
(x
′2,y
′2),c
′
(x
′3′
,y
′3′
),d
′
(x
′4,y
′4);
29.其中,边界坐标点横坐标x
′
=k1k3x;边界坐标点纵坐标y
′
=k2k4y;
30.其中,k3,k4是根据比例尺确定,或根据已知顶点坐标求得。
31.基于遥感图像的国土测绘系统,包括:
32.获取模块,获取遥感图像,并对所述遥感图像进行预处理;
33.第一确定模块,根据预处理后的遥感图像确定边界线并提取多个边界坐标;
34.修正模块,根据所述边界坐标与原始的遥感图像中边界坐标之间的映射关系,对边界坐标进行修正;
35.第二确定模块,利用修正后的边界坐标确定边界函数。
36.可选的,在上述的一种基于遥感图像的国土测绘系统中,所述获取模块包括预处理单元,所述预处理单元,对原始的遥感图像进行重采样,设原图像为f,图像每个像元大小为宽为w、高为h,图像的尺寸为m
×
n个像元;向下重采样后的图像为g,图像每个像元的大小为w/k1、h/k1,图像的尺寸为k1*m
×
k2*n;其中k1,k2均为大于1的整数。
37.可选的,在上述的一种基于遥感图像的国土测绘系统中,第一确定模块包括:
38.边界区域单元,初步提取预处理后的遥感图像的边界线,通过构建长宽分别为x、y个像素的矩形,并以此矩形对预处理后的遥感图像进行裁剪,获得边界区域;
39.滤波单元,对所述边界区域的影像图采用双边滤波法进行影像滤波,滤波完成后,将得到滤波影像图;
40.边界坐标确定单元,所述滤波影像图的中心点坐标即为边界线上的边界坐标。
41.可选的,在上述的一种基于遥感图像的国土测绘系统中,还包括剔除模块,所述剔除模块包括:
42.判断单元,在所述边界区域构建坐标系;计算中心点与边界线的距离,所述距离在
预设误差内,则判断所述中心点为边界坐标点,否则剔除;
43.代替单元,剔除所述异常边界坐标,重新构建长宽分别为x、y个像素的矩形,并以此矩形对预处理后的遥感图像进行裁剪,获得第二边界区域;利用所述第二边界区域代替异常边界坐标所在的边界区域。
44.可选的,在上述的一种基于遥感图像的国土测绘系统中,第二确定模块包括:
45.获取边界区域四个顶点坐标和原始的遥感图像中对应边界区域的顶点坐标;
46.边界区域四个顶点坐标分别是a(x1,y1),b(x2,y2),c(x3,y3),d(x4,y4);
47.原始的遥感图像中对应边界区域的顶点坐标分别是a
′
(x
′1′
,y
′1′
),b
′
(x
′2,y
′2),c
′
(x
′3′
,y
′3′
),d
′
(x
′4,y
′4);
48.其中,边界坐标点横坐标x
′
=k1k3x;边界坐标点纵坐标y
′
=k2k4y;
49.其中,k3,k4是根据比例尺确定,或根据已知顶点坐标求得。
50.经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种基于遥感图像的国土测绘方法及系统,通过修正参数将预处理后的图像与原始图像建立关系,将测绘基准不同、技术标准不一问题,得以解决。除此之外,对遥感图像进行预处理,以获取更加准确的边界线;以及判断边界坐标是否为异常值,同时重新构建边界区域重新确定新的边界坐标点,以提高边界坐标的准确度,通过修正参数统一标准,以相邻边界坐标构建边界函数。
附图说明
51.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
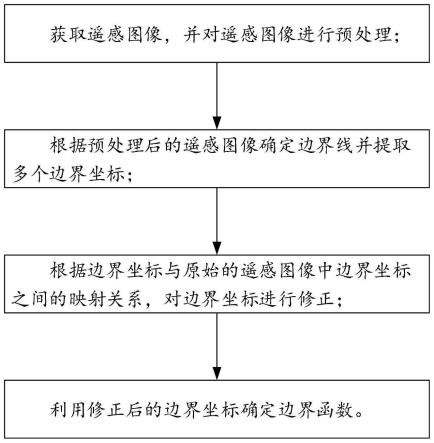
52.图1为本发明的方法流程图;
53.图2为本发明的结构框图。
具体实施方式
54.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
55.本发明实施例公开了一种基于遥感图像的国土测绘方法及系统,通过修正参数将预处理后的图像与原始图像建立关系,将测绘基准不同、技术标准不一问题,得以解决。除此之外,对遥感图像进行预处理,以获取更加准确的边界线;以及判断边界坐标是否为异常值,同时重新构建边界区域重新确定新的边界坐标点,以提高边界坐标的准确度,通过修正参数统一标准,以相邻边界坐标构建边界函数。
56.本发明的实施例公开了一种基于遥感图像的国土测绘方法,如图1所示,具体步骤包括:
57.获取遥感图像,并对遥感图像进行预处理;
58.根据预处理后的遥感图像确定边界线并提取多个边界坐标;
59.根据边界坐标与原始的遥感图像中边界坐标之间的映射关系,对边界坐标进行修正;
60.利用修正后的边界坐标确定边界函数。
61.需要了解的是,由于各个测绘机构采用不同的测绘基准或技术标准,导致结果不统一,本实施例通过修正参数将预处理后的图像与原始图像建立关系,将测绘基准不同、技术标准不一问题,得以解决。
62.为了进一步优化上述技术方案,预处理包括:对原始的遥感图像进行重采样,设原图像为f,图像每个像元大小为宽为w、高为h,图像的尺寸为m
×
n个像元;向下重采样后的图像为g,图像每个像元的大小为w/k1、h/k1,图像的尺寸为k1*m
×
k2*n;其中k1,k2均为大于1的整数。
63.进一步,一般情况下k1、k2取相同,且取均3较为适宜。
64.将原始的遥感图像进行重采样,便于获取更加准确的边界线。
65.为了进一步优化上述技术方案,确定边界线并提取多个边界坐标具体步骤如下:
66.初步提取预处理后的遥感图像的边界线,通过构建长宽分别为x、y个像素的矩形,并以此矩形对预处理后的遥感图像进行裁剪,获得边界区域;
67.再对边界区域的影像图采用双边滤波法进行影像滤波,滤波完成后,将得到滤波影像图;
68.其中滤波影像图的中心点坐标即为边界线上的边界坐标。
69.为了进一步优化上述技术方案,进行修正前,还包括异常边界坐标的剔除,具体步骤包括:
70.在边界区域构建坐标系;
71.计算中心点与边界线的距离,距离在预设误差内,则判断中心点为边界坐标点,否则剔除;
72.剔除异常边界坐标,重新构建长宽分别为x、y个像素的矩形,并以此矩形对预处理后的遥感图像进行裁剪,获得第二边界区域;
73.利用第二边界区域代替异常边界坐标所在的边界区域。
74.进一步,通过计算中心点到边界线的距离,确定是否为异常值,若是异常值,则重新构建边界区域,保证边界坐标的准确。
75.为了进一步优化上述技术方案,根据边界坐标与原始的遥感图像中边界坐标之间的映射关系具体步骤如下:
76.获取边界区域四个顶点坐标和原始的遥感图像中对应边界区域的顶点坐标;
77.边界区域四个顶点坐标分别是a(x1,y1),b(x2,y2),c(x3,y3),d(x4,y4);
78.原始的遥感图像中对应边界区域的顶点坐标分别是a
′
(x
′1′
,y
′1′
),b
′
(x
′2,y
′2),c
′
(x
′3′
,y
′3′
),d
′
(x
′4,y
′4);
79.其中,边界坐标点横坐标x
′
=k1k3x;边界坐标点纵坐标y
′
=k2k4y;
80.其中,k3,k4是根据比例尺确定,或根据已知顶点坐标求得。
81.本发明的另一实施例公开了一种基于遥感图像的国土测绘系统,如图2所示,包括:
82.获取模块,获取遥感图像,并对遥感图像进行预处理;
83.第一确定模块,根据预处理后的遥感图像确定边界线并提取多个边界坐标;
84.修正模块,根据边界坐标与原始的遥感图像中边界坐标之间的映射关系,对边界坐标进行修正;
85.第二确定模块,利用修正后的边界坐标确定边界函数。
86.为了进一步优化上述技术方案,获取模块包括预处理单元,预处理单元,对原始的遥感图像进行重采样,设原图像为f,图像每个像元大小为宽为w、高为h,图像的尺寸为m
×
n个像元;向下重采样后的图像为g,图像每个像元的大小为w/k1、h/k1,图像的尺寸为k1*m
×
k2*n;其中k1,k2均为大于1的整数。
87.为了进一步优化上述技术方案,第一确定模块包括:
88.边界区域单元,初步提取预处理后的遥感图像的边界线,通过构建长宽分别为x、y个像素的矩形,并以此矩形对预处理后的遥感图像进行裁剪,获得边界区域;
89.滤波单元,对边界区域的影像图采用双边滤波法进行影像滤波,滤波完成后,将得到滤波影像图;
90.边界坐标确定单元,滤波影像图的中心点坐标即为边界线上的边界坐标。
91.为了进一步优化上述技术方案,还包括剔除模块,剔除模块包括:
92.判断单元,在边界区域构建坐标系;计算中心点与边界线的距离,距离在预设误差内,则判断中心点为边界坐标点,否则剔除;
93.代替单元,剔除异常边界坐标,重新构建长宽分别为x、y个像素的矩形,并以此矩形对预处理后的遥感图像进行裁剪,获得第二边界区域;利用第二边界区域代替异常边界坐标所在的边界区域。
94.为了进一步优化上述技术方案,第二确定模块包括:
95.获取边界区域四个顶点坐标和原始的遥感图像中对应边界区域的顶点坐标;
96.边界区域四个顶点坐标分别是a(x1,y1),b(x2,y2),c(x3,y3),d(x4,y4);
97.原始的遥感图像中对应边界区域的顶点坐标分别是a
′
(x
′1′
,y
′1′
),b
′
(x
′2,y
′2),c
′
(x
′3′
,y
′3′
),d
′
(x
′4,y
′4);
98.其中,边界坐标点横坐标x
′
=k1k3x;边界坐标点纵坐标y
′
=k2k4y;
99.其中,k3,k4是根据比例尺确定,或根据已知顶点坐标求得。
100.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
101.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1