激光雷达的控制方法、计算机存储介质以及激光雷达与流程
本公开涉及光电探测,尤其涉及一种激光雷达的控制方法、一种计算机存储介质以及一种激光雷达。
背景技术:
1、激光雷达作为一种三维测量系统,通过采集的点云实现对测量区域三维测量覆盖。基于时间飞行法(time of flight,tof)的多通道激光雷达可采用多个发射和接收通道,适合要求扫描大视场并且获取高密度点云的情况。
2、如图1中的128个激光器,呈32行4列排布,其中激光器11表示位于第1列第1行的激光器,激光器12表示位于第1列第2行的激光器,激光器 41表示位于第4列第1行的激光器。如果需要提升点云的分辨率或点云频率,可以通过增加并行发光的通道数量的方式,例如:某一款激光雷达并行发光的通道数量为8个,继续参考图1,挑选激光器11、13、22、24、33、34、 44、42作为一组激光器并行发光,并行探测,此时并行探测的通道为 channel1-channel8,则可以在1.333us时间内生成8个测距上限为200m的点。128个激光器分为16组,每组并行发光,并行探测,通过这样的方式,相比于同一时刻只有一个激光器发光的激光雷达,点云的分辨率提升到八倍。
3、图2a示出了激光雷达垂直视场角示意图,图中为激光雷达的垂直方向的剖视图,垂直视场角为激光雷达在垂直方向上可以探测的角度范围,垂直排布的多个激光器发出的探测光束分别对应线束1、线束2、……、线束40,垂直视场角为23°(从向下的-16°到向上的7°)。激光雷达输出的点云图像中,与旋转轴平行的垂直平面上相邻两个点之间的夹角为垂直角分辨率。为了更好的利用激光进行探测,会把探测光束集中到中间感兴趣的区域,因此探测光束并非垂直均匀分布,而是中间密集,两边稀疏。
4、图2b示出了激光雷达水平视场角示意图,图中为激光雷达在水平方向的剖视图,水平视场角为激光雷达在水平方向上可以探测的角度范围,例如机械式激光雷达旋转一周为360°,则水平视场角为360°。激光雷达输出的点云图像中,与旋转轴垂直的水平面(垂直纸面方向)上相邻两个点之间的夹角为水平角分辨率,例如水平角分辨率为0.2°。
5、多通道并行发光测量引入了光串扰和电串扰的问题。
6、光串扰即激光雷达相邻通道并行发光造成的干扰。继续参考图1,激光雷达多通道并行发光时,每个通道的探测器都会接收到来自其他通道发射的探测脉冲在目标物体上的反射光。反射光的强度随距离减小而增强,目标的反射率越高,反射光的强度越高。当其他通道造成的反射光的强度达到一定程度时,会在本通道探测器接收的波形上产生干扰的脉冲波形(会和真正障碍物造成的回波脉冲叠加,而真正的回波脉冲是后续计算距离及反射率的依据,因此距离和反射率的计算都会被干扰,造成结果不准确)。上述光串扰是影响测距精度的主要因素,多发生在近处高反板的场景下。
7、电串扰即激光雷达多个通道同时接收电信号时,电信号较强的通道的信号会通过电路直接串扰到其余的接收通道上,产生干扰的脉冲波形。
8、综上所述,多通道间容易发生信号串扰而导致探测结果不准确,如何消除或者降低通道之间的彼此串扰的影响、提高探测的精准度是多通道激光雷达所面临的问题。
9、背景技术部分的内容仅仅是公开发明人所知晓的技术,并不当然代表本领域的现有技术。
技术实现思路
1、有鉴于现有的一个或多个缺陷,本发明涉及一种激光雷达的控制方法,通过调整并行发光通道在一定时间范围内的相对发光前后时序,让串扰变得随机,并结合多个角度的回波的滤波,挑选出在多个探测方位上位置稳定的回波脉冲,作为被探测方向上的物体反射的真正回波信号,可以降低并行发光通道之间的串扰,提高信噪比及测距的精准度。具体地,所述激光雷达包括多个通道,每个通道包括至少一个激光器和至少一个探测器,所述控制方法包括:
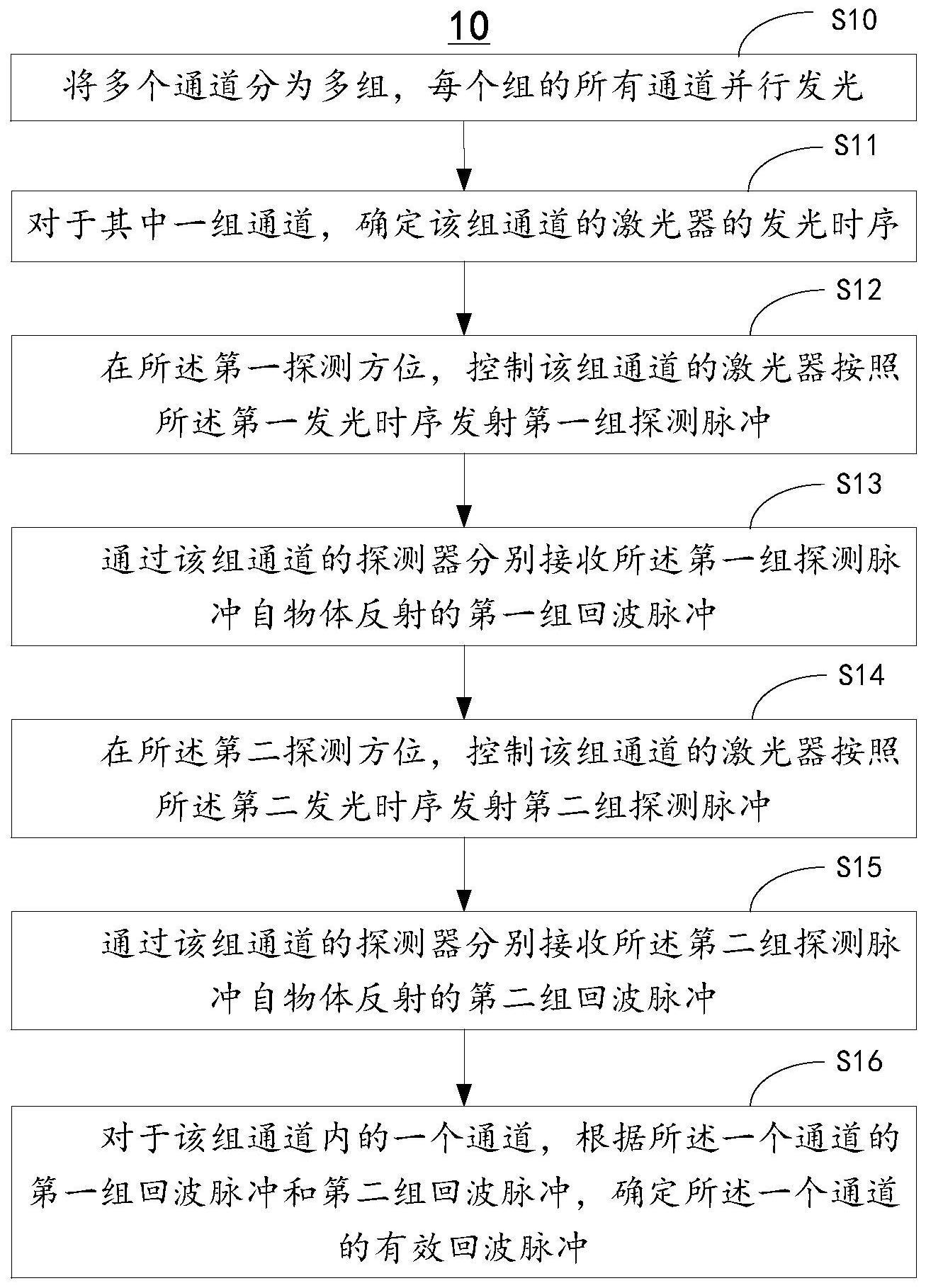
2、s11:其中所述多个通道分为多组,每组通道并行发光,对于其中一组通道,确定该组通道的激光器的发光时序,其中在第一探测方位所用的第一发光时序和在第二探测方位所用的第二发光时序不同;
3、s12:在所述第一探测方位,控制该组通道的激光器按照所述第一发光时序发射第一组探测脉冲;
4、s13:通过该组通道的探测器分别接收所述第一组探测脉冲自物体反射的第一组回波脉冲;
5、s14:在所述第二探测方位,控制该组通道的激光器按照所述第二发光时序发射第二组探测脉冲;
6、s15:通过该组通道的探测器分别接收所述第二组探测脉冲自物体反射的第二组回波脉冲;
7、s16:对于该组通道内的一个通道,根据所述一个通道稳定的第一组回波脉冲和第二组回波脉冲,确定所述一个通道的有效回波脉冲。
8、根据本发明的一个优选实施例,其中所述第一发光时序和第二发光时序中,该组通道的至少部分激光器不同时发光。
9、根据本发明的一个优选实施例,其中在步骤s13和s15中,该组通道中每个通道的探测器接收的回波脉冲包括有效回波脉冲和由其他通道产生的串扰,所述步骤s16包括:根据时间匹配度,确定所述一个通道在所述第一探测方位和第二探测方位时重合的回波脉冲。
10、根据本发明的一个优选实施例,其中在步骤s12和s14中,该组通道的激光器发射的脉冲中至少一个脉冲作为测距脉冲,所述步骤s16包括:对于该组通道内的一个通道,相对平移所述一个通道在所述第一探测方位和第二探测方位的测距脉冲的发射时间至重合,比对两次的测距结果,选出位置稳定的回波脉冲。
11、根据本发明的一个优选实施例,其中在步骤s13和s15中,通过该组通道的探测器分别接收所述测距脉冲自物体反射的测距回波脉冲,所述步骤s16 包括:对于该组通道内的一个通道,相对平移所述一个通道在所述第一探测方位和第二探测方位的测距脉冲的发射时间至重合,在时间上相互错开的测距回波脉冲为位置稳定的回波脉冲。
12、根据本发明的一个优选实施例,其中所述步骤s11还包括:确定该组通道的激光器在第二探测方位之后的至少一个其他探测方位的发光时序,其中所述在至少一个其他探测方位的发光时序不同于所述第一发光时序和第二发光时序,所述步骤s16包括:对于该组通道内的一个通道,确定所述一个通道在所述第一探测方位、第二探测方位以及至少一个其他探测方位时位置稳定的回波脉冲,作为所述一个通道在所述第一探测方位和/或第二探测方位的有效回波脉冲。
13、根据本发明的一个优选实施例,其中所述第一探测方位和所述第二探测方位以及所述至少一个其他探测方位的时间差在预设时间范围内。
14、根据本发明的一个优选实施例,其中所述步骤s16还包括:根据至少一个第二通道在所述第一探测方位和第二探测方位时的回波脉冲,确定所述一个通道在所述第一探测方位和第二探测方位时位置稳定的回波脉冲。
15、根据本发明的一个优选实施例,其中所述步骤s16包括:当所述一个通道在所述第一探测方位和第二探测方位时位置稳定的回波脉冲的幅值的差值或比值超过预设阈值时,将所述稳定的回波脉冲作为所述一个通道在所述第一探测方位和/或第二探测方位的有效回波脉冲。
16、根据本发明的一个优选实施例,其中所述步骤s11包括:
17、通过以下方式确定所述第一发光时序和第二发光时序:根据该组通道中每个通道之前的测距结果、与该通道邻近的通道之前的测距结果以及障碍物信息中的一项或多项,确定所述第一发光时序和第二发光时序,所述第一发光时序和第二发光时序配置成使得:第一组回波脉冲和第二组回波脉冲在时间上相互错开。
18、根据本发明的一个优选实施例,所述控制方法还包括:将该组通道的激光器的总飞行时间窗口至少分为第一区间和第二区间,其中所述第一发光时序配置成使得:第一组回波脉冲不重合地分布在所述第二区间内,所述第二发光时序配置成使得:第二组回波脉冲与第一组回波脉冲不重合地分布在所述第二区间内。
19、根据本发明的一个优选实施例,所述控制方法还包括:将所述第二区间分为k个子区间,其中k为整数并且大于等于该组内通道的数目,其中所述第一发光时序配置成使得:第一组回波脉冲不重合地分布在所述k个子区间内;所述第二发光时序配置成使得:第二组回波脉冲与第一组回波脉冲不重合地分布在所述k个子区间内。
20、根据本发明的一个优选实施例,其中所述每个子区间的长度大于所述回波脉冲的最大脉宽。
21、根据本发明的一个优选实施例,其中所述第一发光时序配置成使得:所述第一组回波脉冲分布在所述k个子区间中未被占用并且距离最近的子区间内;所述第二发光时序配置成使得:所述第二组回波脉冲分布在所述k个子区间中未被占用并且距离最近的子区间内。
22、本发明还涉及一种计算机存储介质,包括存储于其上的计算机可执行指令,所述可执行指令在被处理器执行时实施如权利要求1-14中任一项所述的控制方法。
23、本发明还涉及一种激光雷达,包括:
24、多个激光器,每个激光器发射的脉冲中至少一个脉冲作为测距脉冲;
25、多个探测器,所述多个激光器和所述多个探测器构成多个通道,每个通道包括至少一个激光器和至少一个探测器;
26、控制装置,所述控制装置与所述多个激光器和所述多个探测器连接,所述控制装置配置成:
27、将所述多个通道分为多组,每组通道并行发光,对于其中一组通道,确定该组通道的激光器的发光时序,其中在第一探测方位所用的第一发光时序和在第二探测方位所用的第二发光时序不同;
28、在所述第一探测方位,控制该组通道的激光器按照所述第一发光时序发射第一组探测脉冲;
29、通过该组通道的探测器分别接收所述第一组探测脉冲自物体反射的第一组回波脉冲;
30、在所述第二探测方位,控制该组通道的激光器按照所述第二发光时序发射第二组探测脉冲;
31、通过该组通道的探测器分别接收所述第二组探测脉冲自物体反射的第二组回波脉冲;
32、对于该组通道内的一个通道,根据所述一个通道的第一组回波脉冲和第二组回波脉冲,确定所述一个通道的有效回波脉冲。
33、根据本发明的一个优选实施例,其中所述第一发光时序和第二发光时序中,该组通道的至少部分激光器不同时发光。
34、根据本发明的一个优选实施例,其中该组通道中每个通道的探测器接收的回波脉冲包括有效回波脉冲和由其他通道产生的串扰,所述控制装置配置成:根据时间匹配度,确定所述一个通道在所述第一探测方位和第二探测方位时重合的回波脉冲。
35、根据本发明的一个优选实施例,其中该组通道的激光器发射的脉冲中至少一个脉冲作为测距脉冲,所述控制装置配置成:对于该组通道内的一个通道,相对平移所述一个通道在所述第一探测方位和第二探测方位的测距脉冲的发射时间至重合,比对两次的测距结果,选出位置稳定的回波脉冲。
36、根据本发明的一个优选实施例,其中通过该组通道的探测器分别接收所述测距脉冲自物体反射的测距回波脉冲,所述控制装置配置成:对于该组通道内的一个通道,相对平移所述一个通道在所述第一探测方位和第二探测方位的测距脉冲的发射时间至重合,在时间上相互错开的测距回波脉冲为位置稳定的回波脉冲。
37、根据本发明的一个优选实施例,其中所述控制装置配置成:确定该组通道的激光器在第二探测方位之后的至少一个其他探测方位的发光时序,其中所述在至少一个其他探测方位的发光时序不同于所述第一发光时序和第二发光时序,所述控制装置还配置成:对于该组通道内的一个通道,确定所述一个通道在所述第一探测方位、第二探测方位以及至少一个其他探测方位时位置稳定的回波脉冲,作为所述一个通道在所述第一探测方位和/或第二探测方位的有效回波脉冲。
38、根据本发明的一个优选实施例,其中所述第一探测方位和所述第二探测方位以及所述至少一个其他探测方位的时间差在预设时间范围内。
39、根据本发明的一个优选实施例,其中所述控制装置还配置成:根据至少一个第二通道在所述第一探测方位和第二探测方位时的回波脉冲,确定所述一个通道在所述第一探测方位和第二探测方位时位置稳定的回波脉冲。
40、根据本发明的一个优选实施例,其中所述控制装置还配置成:当所述一个通道在所述第一探测方位和第二探测方位时位置稳定的回波脉冲的幅值的差值或比值超过预设阈值时,将所述稳定的回波脉冲作为所述一个通道在所述第一探测方位和/或第二探测方位的有效回波脉冲。
41、根据本发明的一个优选实施例,其中所述控制装置还配置成:通过以下方式确定所述第一发光时序和第二发光时序:根据该组通道中每个通道之前的测距结果、与该通道邻近的通道之前的测距结果以及障碍物信息中的一项或多项,确定所述第一发光时序和第二发光时序,所述第一发光时序和第二发光时序配置成使得:第一组回波脉冲和第二组回波脉冲在时间上相互错开。
42、根据本发明的一个优选实施例,其中所述控制装置还配置成:将该组通道的激光器的总飞行时间窗口至少分为第一区间和第二区间,其中所述第一发光时序配置成使得:第一组回波脉冲不重合地分布在所述第二区间内,所述第二发光时序配置成使得:第二组回波脉冲与所述第一组回波脉冲不重合地分布在所述第二区间内。
43、根据本发明的一个优选实施例,其中所述控制装置还配置成:将所述第二区间分为k个子区间,其中k为整数并且大于等于该组内通道的数目,其中所述第一发光时序配置成使得:第一组回波脉冲不重合地分布在所述k个子区间内;所述第二发光时序配置成使得:第二组回波脉冲与所述第一组回波脉冲不重合地分布在所述k个子区间内。
44、根据本发明的一个优选实施例,其中所述每个子区间的长度大于所述回波脉冲的最大脉宽。
45、根据本发明的一个优选实施例,其中所述控制装置还配置成:所述第一发光时序配置成使得:所述第一组回波脉冲分布在所述k个子区间中未被占用并且距离最近的子区间内;所述第二发光时序配置成使得:所述第二组回波脉冲分布在所述k个子区间中未被占用并且距离最近的子区间内。
46、本发明的方案,激光雷达在第一探测方位所用的第一发光时序和在第二探测方位所用的第二发光时序不同,以使得串扰变得随机,便于挑选出位置稳定的真正的回波脉冲,进而提高探测的精准度,减少噪点。
- 还没有人留言评论。精彩留言会获得点赞!