用于识别电动马达的堵转的方法与流程
1.本发明涉及一种用于识别电动马达、尤其是bldc马达的马达堵转的方法,并且因此涉及一种用于保护这样的电动马达以防过载的方法。
背景技术:
2.无刷直流电机(brushless dc motor,缩写为bldc马达或bl马达,以及electronically commutated motor,缩写为ec马达)与命名相反,不是基于直流电机的工作原理,而是如通过永磁体激励的三相电流同步电机那样构造。三相电流绕组通过合适的电路这样操控,使得其产生迁移的磁场,该磁场带动永磁激励的转子。调节特性在很大程度上类似于直流电-并励电机。
3.如果电动马达、尤其是bldc马达在堵转的状态中以其标称马达电流通电,那么就会出现绕组的不允许的加热。这导致马达损坏并且可能导致火灾。在常规的正常运行中,马达通过其旋转运动被冷却。出于这个原因,在正常运行中允许的马达电流可能高于在马达堵转时的马达电流。在现有技术中存在不同的方案,以防止或及时地探测这样的状态。
4.为此在现有技术中提出对霍尔信号或旋转编码器信号进行评估,参考转速进行直接评价。
5.由de 101 21 766 a1例如已知一种用于机动车中的风扇的驱动机组,该驱动机组具有在直流电压网上运行的电动风扇马达和用于通过改变施加在风扇马达上的运行电压来控制风扇马达的转速的装置。然而,风扇马达的堵转和/或运转不畅不是总能被识别到,从而导致风扇马达及其馈电线发生不允许的过热,在负载持续存在的情况下,这种不允许的过热将导致风扇马达毁坏。
6.由de 103 36 953 a1已知一种装置,其具有用于检测风扇马达的马达电流的机构。这些结构例如可以包括电流测量电阻(stromme sswiderstand)。此外,该装置包括具有存储机构的控制电路。例如通过专业车间的维护技师、通过风扇马达的制造商等可在这个存储机构中存储风扇马达的最大允许电流。继而在控制电路中将检测到的马达电流与所存储的最大电流进行比较,一旦检测到的马达电流超过存储的最大电流,控制电路即识别到风扇马达发生堵转和/或运转不畅。由于最大电流是固定的,这就无法对马达的完整功率范围进行利用。为了根据转速来提高所述功率范围,必须检测马达的机械转速。
7.电动力(emk)(英语:electromotive force(emf))和(在相同意义上)电动势是用于电压源的源电压的历史上发展的名称。在电动马达或发电机的绕组中通过旋转感应的电压也称为emk。
8.与此对应地,电动马达的在定子磁场中旋转的转子或者发电机的磁性转子在其绕组中感应出电压。在马达中,所述感应电压被称为反emk。在此,哪个电压实际上施加在马达或发电机上是不重要的,所述两个电压的差在绕组的欧姆电阻上下降或由漏电流引起。
9.除了所描述的解决方案之外,也存在如下方法,其中使用所计算的反emk与固定的阈值的比较,以便由此获得针对马达的堵转情况的结论。在这种无传感器的转子位置估计
器中,其根据感应电压(emk)来确定位置,为了计算emk所需的参数大多在实验室条件下[温度~20℃]测量并且作为恒定的、即固定的参数存储在软件中。
[0010]
借助于机器的物理模型(pmsm),由输出的马达电压通过参数(定子电阻、在q轴上的电感、在d轴上的电感)计算emk。除了转子的实际位置确定之外,还可以使用emk来检探测堵转的马达,因为emk的数值与速度成比例。为此已知在软件中存储固定的并且因此限定的阈值,以便评估马达是否转动或堵转。阈值应被确定为尽可能小,因为该参数限定驱动装置的最小转速。如果所求得的emk在一定的时间之后小于所限定的最小阈值并且马达但主动通过输出级进行转换,那么就可以或者必须以马达堵转为出发点。
[0011]
然而,在此在实践中出现以下问题,从而使已知的方法还不充分。
[0012]
作为示例,铜具有3.9
·
10-3
[k-1
]的电阻温度系数。缠绕有铜线的马达绕组中的温度可以采用从-40℃至+180℃的典型值。
[0013]
在确定对于ud和uq的电压值的q分量和d分量的emk时,除了电流iq和id的q分量和d分量之外还流入电阻参数r。
[0014]
emk的确定如下进行:
[0015][0016][0017]
值ud、uq对应于端电压,并且下面的项对应于u_
emk
:
[0018]
ω
el
·
ψ
pm
[0019]
由此对于在室温下测得的参数(r)产生[-23.4%/+62%]的偏差。作为离差的结果,基于emk计算的堵转检测在“热的”绕组的情况下不引人注意,或者在“冷的”绕组的情况下识别出堵转,即使马达自由转动。因此,需要进一步发展在现有技术中已知的解决方案。
技术实现要素:
[0020]
因此,本发明的任务在于,也通过emk计算安全且可靠地识别马达的堵转。
[0021]
所述任务通过根据权利要求1的特征组合来解决。
[0022]
因此,根据本发明设置了一种用于识别电动马达的、优选bldc马达的堵转状态的方法,所述bldc马达在换向电子器件上运行,其中,通过相比于所存储的阈值s
grund
对emk的评估如下地算出堵转状态:
[0023]
a)在考虑代表马达的定子电阻r的与温度有关的参数的情况下算出emk;
[0024]
b)基于实际绕组温度的影响算出所算出的emk的偏差;
[0025]
c)确定用于校正定子电阻的参数的校正因数k,以便由此算出校正的emk,以及
[0026]
d)通过将根据温度校正的emk与所存储的阈值进行比较来确定是否存在马达的堵转状态。
[0027]
优选地,为了算出emk,以上述方程为基础。如果现在所算出的(未校正的)emk由于过高的马达温度而低于阈值s
grund
,那么会错误地探测到堵转状态。然而,基于根据本发明的步骤b)和c)算出用于定子电阻的与温度相关的校正因数。由此获得校正的emk,其高于阈值s
grund
并且由此识别出根本不存在马达堵转。
[0028]
在本发明的一个优选的设计方案中可以规定,用于确定校正因子k的马达绕组的
温度通过传感器、优选温度传感器来检测并且相应地调整用于确定emk的定子电阻r的参数。因此,所述测量是直接的温度测量,其可以直接在评估中进行。
[0029]
而在本发明的一种替代的设计方案中可以规定,用于确定校正因子k的温度不是通过借助传感器对马达绕组的温度检测来确定,而是间接地通过在其它马达参考位置或马达模块上的温度测量来确定。因此,例如可以获得存储的温度特性曲线族,以便通过在其上检测温度的参考点推断出马达中的绕组温度并且以这种方式实施校正。
[0030]
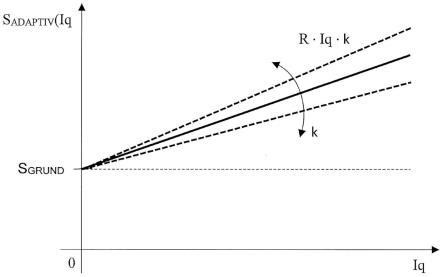
此外有利的一种解决方案是,用于堵转识别的阈值s
adaptiv
自适应地匹配于马达电流i,尤其是根据以下公式通过对于阈值的与电流有关的函数:
[0031]sadaptiv
=s
grund
+r
·i·
k,
[0032]
其中,s
grund
是所存储的阈值,r是定子电阻,i是马达电流,并且k是特定的校正因数。
[0033]
换句话说,这提供了另一种可能性,即通过考虑误差仅在电流也流动时(rs(t)
·
i)才出现,来校正马达模型中的误差。为此,在所使用的软件中自适应地匹配阈值(用于堵转识别的阈值s
grund
)。利用另一个因数进行校正项的加权(预计会有哪个故障程度)。
[0034]
校正因数可以以不同的方式存储在系统或存储器中。因此,可以为校正因数k存储固定的值,或者可切换的值,或者校正因数k的确定通过项(term)或者相应的特性曲线族来进行。
附图说明
[0035]
本发明的其它有利的改进方案在从属权利要求中得以表征或者下面与本发明的优选的实施方式的说明一起借助附图详细示出。
[0036]
附图示出:
[0037]
图1示出用于确定因数k的示例性视图。
[0038]
下面借助一个优选的实施例参照图1详细地阐述本发明。
具体实施方式
[0039]
图1示出一种用来校正模型中的误差的可能性。该方案基于如下思想,即只有当电流也流动(rs(t)
·
i)时才出现误差。为此,在软件中,自适应地匹配用于堵转识别的阈值,并且以在实验室条件下在特定参考温度、例如20℃下限定的emk基本阈值(bemf阈值)开始。以校正因数k(其对应于曲线的斜率),根据哪个电流iq流动来对emk阈值的校正项进行加权。由此根据以下公式进行阈值的自适应匹配,从该阈值起识别出停止状态或堵转:
[0040]
自适应阈值=emk-基础阈值+rs·i·k[0041]
本发明在其实施方式中不限于前面说明的优选的实施例。相反地,可设想多种变型方案,这些变型方案即使在原则上不同类型的设计中也使用所描述的解决方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1