旋转角检测装置及车辆用送电、受电系统的制作方法
1.本公开涉及检测车载单元相对于地上单元的相对旋转角的旋转角检测装置及车辆用送电、受电系统。
背景技术:
2.在日本特开2017-200328中公开了非接触方式的车辆用送电、受电系统。在该送电、受电系统中,地面侧的一次线圈(送电线圈)向车辆侧的二次线圈(受电线圈)进行非接触的送电。并且,在该送电、受电系统中,基于一次线圈与二次线圈之间的耦合系数及耦合系数的时间变化来计算二次线圈相对于一次线圈的相对位置及倾斜。
技术实现要素:
3.发明所要解决的课题
4.如日本特开2017-200328所记载的那样,在基于耦合系数、即两个线圈的电磁耦合的程度及其时间变化的方法中,认为难以准确地检测出送电、受电系统中的车载单元相对于地上单元的相对旋转角。另一方面,要求能够利用简单的结构来进行该旋转角的检测。
5.本公开能够利用简单的结构来进行车载单元相对于地上单元的相对旋转角的检测。
6.用于解决课题的技术方案
7.本公开的第一方式所涉及的旋转角检测装置检测车载单元相对于地上单元的相对旋转角。地上单元是送电单元及受电单元中的一方,且配置于停车空间。车载单元是送电单元及受电单元中的另一方,在能够与地上单元相向的位置搭载于车辆。在从铅垂方向上方俯视地上单元时,地上单元的朝着向地上单元接近的车辆的一侧的边具有直线形状。旋转角检测装置具备第一测距传感器及第二测距传感器、旋转角传感器、处理器。第一测距传感器及第二测距传感器以在车辆的左右方向上排列的方式、且以在停车时在能够与地上单元相向的位置处朝向路面的方式搭载于车辆。旋转角传感器检测车辆的车轮旋转轴的旋转角或与车轮旋转轴联动地旋转的旋转轴的旋转角。处理器在车辆开始停车后,基于第一测距传感器及第二测距传感器中的一方的输出的变化来取得第一测距传感器及第二测距传感器中的上述一方开始与地上单元相向的第一定时。处理器在检测到第一定时后,基于第一测距传感器和第二测距传感器中的另一方的输出的变化来取得第一测距传感器和第二测距传感器中的另一方开始与地上单元相向的第二定时。处理器基于旋转角传感器的输出来计算从第一定时到第二定时为止的期间的车辆的移动距离。并且,处理器计算将计算出的移动距离除以第一测距传感器与第二测距传感器之间的距离的所得值的反正切值作为横摆角。横摆角为以车辆的铅垂方向轴为中心的车载单元相对于地上单元的旋转角。
8.也可以是,第一测距传感器及第二测距传感器设置于车载单元。
9.也可以是,旋转角检测装置还具备以在上述左右方向上排列且朝向路面的方式设置于车载单元的第三测距传感器及第四测距传感器。第三测距传感器以在车辆的前后方向
上从第一测距传感器离开预定距离的方式配置。并且,也可以是,第四测距传感器以在上述前后方向上从第二测距传感器离开上述预定距离的方式配置。
10.也可以是,处理器构成为计算由第一测距传感器检测出的第一距离与由第三测距传感器检测出的第三距离的平均值和由第二测距传感器检测出的第二距离与由第四测距传感器检测出的第四距离的平均值的第一差值。并且,也可以是,处理器构成为计算将计算出的第一差值除以第一测距传感器与第二测距传感器之间的距离的所得值的反正弦值作为侧倾角,该侧倾角为以车辆的前后方向轴为中心的车载单元相对于地上单元的旋转角。
11.也可以是,处理器构成为计算由第一测距传感器检测出的第一距离与由第二测距传感器检测出的第二距离的平均值和由第三测距传感器检测出的第三距离与由第四测距传感器检测出的第四距离的平均值的第二差值。并且,也可以是,处理器构成为计算将计算出的第二差值除以第一测距传感器与第三测距传感器之间的距离的所得值的反正弦值作为俯仰角,该俯仰角为以车辆的左右方向轴为中心的车载单元相对于地上单元的旋转角。
12.也可以是,车载单元包含用于在车载单元与地上单元之间进行非接触的送电、受电的送电线圈或受电线圈。并且,也可以是,在从上述铅垂方向轴的方向观察车载单元时,第一测距传感器、第二测距传感器、第三测距传感器及第四测距传感器以包围配置于车载单元内的送电线圈或受电线圈的方式配置。
13.也可以是,旋转角传感器为检测对车辆进行驱动的电动马达的旋转轴的旋转角的旋转变压器。
14.也可以是,本公开的第二方式所涉及的车辆用送电、受电系统具备上述的旋转角检测装置。车辆用送电、受电系统也可以构成为在送电单元与受电单元之间进行非接触的送电、受电。
15.发明效果
16.根据本公开的方式所涉及的旋转角检测装置及具备其的车辆用送电、受电系统,能够利用由一对测距传感器(第一及第二测距传感器)和车辆的旋转角传感器构成的简单的结构来检测车载单元相对于地上单元的横摆角。
附图说明
17.下面将参考附图描述本发明的示例性实施例的特征、优点以及技术和工业意义,其中相同的附图标记表示相同的部件,并且其中:
18.图1是概略地表示实施方式1的旋转角检测装置所应用的车辆用送电、受电系统的结构的一例的图。
19.图2是从铅垂方向(z轴方向)上的上方俯视前往停车空间的车辆的图。
20.图3a是用于说明车载单元相对于地上单元的横摆角的定义的图。
21.图3b是用于说明车载单元相对于地上单元的横摆角的定义的图。
22.图4是表示实施方式1的旋转角检测装置的结构的框图。
23.图5是从车辆的铅垂方向上的下方侧观察图1所示的车载单元的立体图。
24.图6a是用于说明实施方式1的横摆角的计算方法的概要的图。
25.图6b是用于说明实施方式1的横摆角的计算方法的概要的图。
26.图7是用于说明实施方式1的横摆角的计算方法的概要的图。
27.图8是表示与实施方式1的横摆角的检测相关的处理的流程的流程图。
28.图9是表示与车载单元相对于地上单元的相对位置及相对旋转角偏差量所对应的向驾驶者的通知相关的处理的流程的流程图。
29.图10是表示实施方式2的旋转角检测装置的结构的框图。
30.图11是用于说明图10所示的第三及第四测距传感器的配置场所的图。
31.图12a是用于说明实施方式2的侧倾角的计算方法的图。
32.图12b是用于说明实施方式2的侧倾角的计算方法的图。
33.图13a是用于说明实施方式2的俯仰角的计算方法的图。
34.图13b是用于说明实施方式2的俯仰角的计算方法的图。
35.图14是表示与实施方式2的侧倾角及俯仰角的检测相关的处理的流程的流程图。
具体实施方式
36.在以下所示的实施例中,当提及要素的个数、数量、量、范围等数量的情况下,除了特别指明的情况和在原理上明确地确定其数量的情况以外,本公开的技术思想不限于所提及的数量。另外,在以下所示的实施例中说明的结构和步骤等不一定是本公开的技术思想所必需的,除非另有说明或者除非可在原理上明确地确定。
37.1.实施方式1
38.1-1.车辆用送电、受电系统的结构例
39.图1是概略地表示实施方式1的旋转角检测装置50所应用的车辆用送电、受电系统1的结构的一例的图。车辆用送电、受电系统1具备设置于地面侧的送电装置2和搭载于车辆3的受电装置4。该送电、受电系统1构成为利用例如磁场共振方式从送电装置2向受电装置4传输电力。但是,非接触的电力传输方式不作特别限定,也可以使用电磁感应方式等其他方式。
40.送电装置2设置于车辆3的停车空间5。送电装置2包含送电单元(以下,也称为“地上单元”)21。作为一例,送电装置2由该地上单元21和送电站22构成。
41.地上单元21具有壳体23。壳体23收纳送电线圈24。送电站22与地上单元21电连接。送电站22包含交流电源25和送电电路26。交流电源25经由送电电路26而向地上单元21(送电线圈24)供给电力。送电电路26包含逆变器,控制在送电线圈24中流动的电流。
42.如图1所示,地上单元21放置在路面6上,在顶面23a与路面6之间具有落差27。落差27的高度小于路面6与车辆3的底面之间的间隙。另外,地上单元21只要以具有能够由后述的第一及第二测距传感器34、35检测出的落差27的方式配置于路面6即可,例如,也可以埋设于路面6。另外,落差27也可以代替如图1所示那样顶面23a高于路面6的例子,而形成为顶面23a低于路面6。另外,送电站22例如设置于停车空间5的一端。
43.搭载于车辆3的受电装置4包含受电单元(以下,也称为“车载单元”)41。作为一例,受电装置4由车载单元41和受电电路42构成。车载单元41在能够与地上单元21相向的位置(即,车辆3的底部)搭载于车辆3,接收从地上单元(送电单元)21传输来的电力。
44.车载单元41具有壳体43。壳体43收纳受电线圈44。受电线圈44在与送电线圈24相向的状态下接收从送电线圈24以非接触的方式传输的电力。受电电路42包含对从受电线圈44接收的交流电力进行整流而转换为直流的整流器。
45.车辆3与受电装置4一起还具备作为驱动源的电动马达31和向电动马达31供给电力的蓄电池32。即,车辆3是电动车辆。具体而言,车辆3例如是蓄电池电动汽车。另外,车辆3的其他例子包括具备电动马达31和内燃机作为驱动源的混合动力车辆及燃料电池车辆。蓄电池32例如是锂离子电池,与受电电路42连接。蓄电池32通过从地上侧的送电装置2经由受电装置4而供给的电力而被充电。
46.另外,车辆3具备电子控制单元(ecu)33。ecu33是执行与车辆3相关的各种处理的计算机。具体而言,由ecu33执行的处理包括与电动马达31的控制相关的处理、与从送电装置2接收的电力的控制相关的处理及与后述的各种旋转角(在实施方式1中,为横摆角α)的检测相关的处理。ecu33具备处理器33a及存储装置33b。处理器33a读出并执行存储于存储装置33b的程序。由此,通过处理器33a实现上述的各种处理。另外,ecu33也可以是多个。例如,与横摆角α的检测相关的处理也可以由专用的ecu(处理器)进行。
47.此外,车辆3为了检测横摆角α而具备一对测距传感器(第一及第二测距传感器)34、35和旋转变压器36。关于这些测距传感器34、35的详细情况,将参照图5在后面叙述。
48.旋转变压器36检测电动马达31的旋转轴的旋转角。电动马达31的旋转轴相当于与车辆3的车轮7的旋转轴联动地旋转的旋转轴的一例。因此,ecu33能够基于电动马达31的旋转角(更详细而言,该旋转角、电动马达31与车轮7之间的齿轮比及车轮7(轮胎)的半径)来计算车辆3的移动距离。旋转变压器36相当于本公开的“旋转角传感器”的一例。该旋转角传感器也可以代替旋转变压器36,例如是检测车轮7的旋转轴的旋转角的车轮速度传感器。作为补充,为了检测电动马达31的控制所需的旋转角而使用的旋转变压器36通常与车轮速度传感器相比,能够以较高的精度检测旋转角。
49.1-2.旋转角检测装置
50.图2是从铅垂方向(z轴方向)上的上方俯视前往停车空间5的车辆3的图。附图标记8是划分停车空间5的停车框线。将车辆3的前后方向轴、左右方向轴及铅垂方向轴分别称为x轴、y轴及z轴(参照图2及后述的图5等)。更详细而言,图2作为一例示出了后方停车,但以下说明的横摆角α的计算方法也能够应用于前方停车时。
51.在如上述的送电、受电系统1那样进行非接触充电的系统中,在以非接触方式进行送电、受电时,要求分别准确地检测车载单元相对于地上单元的相对位置及相对旋转角。这是为了判定该相对位置及相对旋转角是否分别处于能够进行非接触充电的范围内。具体而言,该相对位置是x轴方向位置、y轴方向位置及z轴方向位置,该相对旋转角是横摆角α(z轴中心的旋转角)、侧倾角β(x轴中心的旋转角)及俯仰角γ(y轴中心的旋转角)。
52.参照图3a及3b,对车载单元41相对于地上单元21的横摆角α的定义进行说明。图3a及3b也与图2相同地,是从z轴方向观察地上单元21及车载单元41时的图。如在上述的图2中由虚线所示那样,在车辆3正确地停在停车空间5时,车辆3的前后方向轴(x轴)与停车框线8平行。在此,为了确定车载单元41相对于地上单元21的横摆角α,将在xy平面上与停车框线8平行的轴作为地上单元21的基准轴l1使用。另外,将与车辆3的x轴(前后方向轴)平行的轴作为车载单元41的基准轴l2使用。
53.在图3a所示的例子中,车辆3以前后方向轴(x轴)与停车框线8平行的状态停车。在该情况下,基准轴l1与基准轴l2平行,因此横摆角α为零。另一方面,在图3b所示的例子中,基准轴l2相对于基准轴l1倾斜。因此,基准轴l2相对于基准轴l1的倾斜角被确定为横摆角
α。
54.1-2-1.旋转角检测装置的结构例
55.在本实施方式中,对上述的相对位置及相对旋转角中的横摆角α的检测方法进行说明。图4是表示实施方式1的旋转角检测装置50的结构的框图。旋转角检测装置50由上述的ecu33、第一及第二测距传感器34、35及旋转变压器36构成。
56.图5是从车辆3的铅垂方向的下方侧观察图1所示的车载单元41时的立体图。车载单元41的壳体43的底面43a与路面6或地上单元21相向。如图5所示,车载单元41以使其底面43a与xy平面平行的方式搭载于车辆3。
57.第一及第二测距传感器34、35分别以朝向z轴方向上的下方侧的方式、即朝向路面6的方式设置于车载单元41,检测其与路面6侧的距离d1及d2。第一测距传感器34和第二测距传感器35在车辆3的左右方向(y轴方向)上排列配置。
58.更详细而言,第一测距传感器34与第二测距传感器35之间的距离(以下,称为“传感器间距离ds1”)设定为比与基准轴l1垂直的方向上的地上单元21的宽度短。由此,除非车辆3相对于地上单元21向在与基准轴l1垂直的方向上大幅偏离地停车的情况,各测距传感器34、35分别能够在停车时在能够与地上单元21相向的位置处朝向路面6。
59.若在停车时第一测距传感器34到了地上单元21的上方,则由第一测距传感器34检测出的距离d1从与路面6的距离变化为与地上单元21的距离。因此,通过在停车中使用第一测距传感器34测量距离d1,能够检测第一测距传感器34开始与地上单元21相向的定时。换言之,能够检测落差27。这对于第二测距传感器35也是相同的。
60.另外,在图5所示的例子中,第一及第二测距传感器34、35设置于车载单元41。但是,第一及第二测距传感器34、35只要以在停车时在能够与地上单元21相向的位置处朝向路面6的方式搭载于车辆3,也可以在除了车载单元41以外的部位设置于车辆3的底面。作为补充,如图3a、图3b所示,在从z轴方向上的上方观察时,作为一例,基准轴l1的方向及其垂直方向各自的车载单元41的尺寸比地上单元21的尺寸短。
61.1-2-2.横摆角α的计算方法的概要
62.图6a及图6b以及图7是用于说明实施方式1的横摆角α的计算方法的概要的图。这些图也是从z轴方向观察地上单元21及车载单元41时的图。另外,这些图表示在车辆侧的基准轴l2相对于地上侧的基准轴l1倾斜的状态下进行停车时。
63.对作为横摆角α的计算的前提的地上单元21的壳体23的形状进行说明。首先,如图6a、图6b所示,作为一例,壳体23的基本形状为四边形。在此基础上,为了计算横摆角α,壳体23的朝着向地上单元21接近的车辆3(车载单元41)一侧的边21a具有“直线形状”。更详细而言,边21a具有在与基准轴l1垂直的方向上延伸的直线形状。
64.另外,关于横摆角α的计算,在此所说的边21a的“直线形状”不一定限于具有严格的直线形状的例子,是包含具有实质的直线形状的例子的概念。另外,在车辆3为了停车而能够从基准轴l1的双方向接近地上单元21的停车空间的例子中,为了在从该双方向停车时检测横摆角α,设置于该停车空间的地上单元21的壳体23也可以使边21a和边21a的相反侧的边也具有“直线形状”。另外,只要具有在此所说的“直线形状”的边21a,壳体23可以具有除了四边形以外的任意的基本形状。
65.图6a对应于第二测距传感器35开始与地上单元21相向的第一定时t1。该第一定时
t1能够基于随着第二测距传感器35通过边21a(落差27)而产生的距离d2的变化来检测。当在第一定时t1之后车辆3的移动继续时,如图6b所示,另一方的第一测距传感器34开始与地上单元21相向的第二定时t2到来。该第二定时t2能够基于随着第一测距传感器34通过边21a(落差27)而产生的距离d1的变化来检测。
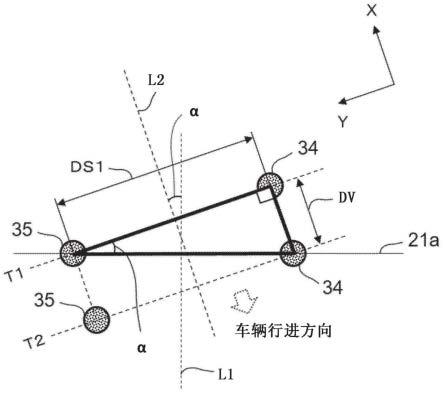
66.图7表示图6a及图6b中的第一及第二定时t1、t2各自的第一及第二测距传感器34、35的位置与地上单元21(边21a)的位置之间的关系。ecu33能够基于上述的旋转变压器36的输出来计算从第一定时t1到第二定时t2为止的期间的车辆3的移动距离dv。另外,传感器间距离ds1是已知的值。并且,连结第一及第二测距传感器34、35之间的直线的方向(即,y轴方向)与车辆3的行进方向(即,x轴方向)正交。
67.因此,如在图7中用粗线所示,能够确定与斜边一起具有长度为传感器间距离ds1的边和长度为移动距离dv的边的直角三角形。并且,在该直角三角形中,与长度为移动距离dv的边相向的内角等于地上侧的基准轴l1与车辆侧的基准轴l2的夹角、即横摆角α。因此,能够基于以下的(1)式,计算将移动距离dv除以传感器间距离ds1的所得值的反正切值作为横摆角α。
68.α=arctan(dv/ds1)
···
(1)
69.1-2-3.ecu进行的处理
70.图8是表示与实施方式1的横摆角α的检测相关的处理的流程的流程图。该流程图的处理在车辆3开始停车时执行。具体而言,在通过驾驶者的操作而进行车辆3的停车的例子中,ecu33例如在检测到由驾驶者操作了用于通知停车开始的预定开关时,判定为停车已开始。或者,ecu33例如在利用车辆3的后退中的相机图像检测到停车空间5时,判定为停车已开始。另外,在车辆3具备自动停车功能的例子中,ecu33例如在检测到由驾驶者操作了选择自动停车功能的开关时,判定为停车已开始。
71.在图8中,ecu33(处理器33a)首先在步骤s100中,判定第一定时t1是否到来。第一定时t1是第一及第二测距传感器34、35中的一方开始与地上单元21相向的定时。如上所述,第一定时t1能够基于第一测距传感器34或第二测距传感器35的输出(距离d1、d2)的变化来取得。
72.在步骤s100中,在第一定时t1未到来的期间,ecu33反复执行步骤s100的处理。另外,在步骤s100的处理的开始后的预定时间内第一定时t1未到来的情况下,ecu33也可以中止本次的停车开始时的横摆角α的检测处理。
73.另一方面,在步骤s100中,在第一定时t1到来了的情况下,处理进入步骤s102。在步骤s102中,ecu33开始测量车辆3的移动距离dv,即,开始利用旋转变压器36测量电动马达31的旋转轴的旋转量。然后,处理进入步骤s104。
74.在步骤s104中,ecu33判定第二定时t2是否到来。第二定时t2是不同于在第一定时t1开始与地上单元21相向的第一测距传感器34或第二测距传感器35的测距传感器开始与地上单元21相向的定时。第二定时t2也与第一定时t1相同地,能够基于第一测距传感器34或第二测距传感器35的输出(距离d1、d2)的变化来取得。
75.在步骤s104中,在第二定时t2未到来的期间,ecu33反复执行步骤s104的处理。另外,在步骤s104的处理开始后的预定时间内第二定时t2未到来的情况下,ecu33也可以中止本次的停车开始时的横摆角α的检测处理。
76.另一方面,在步骤s104中,在第二定时t2到来了的情况下,处理进入步骤s106。在步骤s106中,ecu33基于旋转变压器36的输出(更详细而言,是测量出的上述旋转量)来计算从第一定时t1到第二定时t2为止的期间的移动距离dv。然后,处理进入步骤s108。
77.在步骤s108中,ecu33计算将在步骤s106中计算出的移动距离dv除以已知的传感器间距离ds1的所得值的反正切值(=arctan(dv/ds1))作为横摆角α。
78.接下来,图9是表示与车载单元41相对于地上单元21的相对位置及相对旋转角偏差量所对应的向驾驶者的通知相关的处理的流程的流程图。该流程图的处理也与图8相同地,在车辆3的停车开始时执行。
79.在图9中,ecu33(处理器33a)首先在步骤s200中,检测各种相对位置(x轴方向位置、y轴方向位置及z轴方向位置)及相对旋转角(横摆角α、侧倾角β及俯仰角γ)。具体而言,横摆角α通过图8所示的流程图的处理来检测。侧倾角β及俯仰角γ能够通过在后述的实施方式2中说明的方法来检测。z轴方向位置例如能够使用利用第一测距传感器34或第二测距传感器35检测的距离d1或d2、或距离d1与距离d2的平均值。另外,x轴方向位置及y轴方向位置能够使用公知的任意方法来检测。
80.在接着步骤s200的步骤s202中,ecu33判定在步骤s200中检测出的各种相对位置及相对旋转角是否分别处于预定的规定值内(即,能够执行非接触充电的范围内)。
81.在步骤s202的判定结果为肯定的情况下,处理进入步骤s204。在步骤s204中,ecu33进行向驾驶者通知车载单元41相对于地上单元21处于能够执行非接触充电的范围内的处理。具体而言,ecu33例如利用设置于车辆3的仪表盘的显示装置37进行通知。
82.另一方面,在步骤s202的判定结果为否定的情况下,处理进入步骤s206。在步骤s206中,ecu33例如利用显示装置37进行向驾驶者通知相对位置或相对旋转角产生了偏差的处理。
83.在接着步骤s206的步骤s208中,ecu33判定车辆3是否停止(换言之,驾驶者是否阻止了停车动作)。该判定例如能够基于由旋转变压器36检测出的旋转角的变化是否停止来进行。
84.在步骤s208中,在车辆3未停止的情况下,即,在再次进行停车动作的情况下,处理返回到步骤s200。另一方面,在车辆3停止了的情况下,处理进入步骤s210。在步骤s210中,ecu33例如利用显示装置37进行向驾驶者通知因相对位置或相对旋转角的偏差而不能进行非接触充电的处理。
85.1-3.效果
86.根据以上说明的实施方式1的旋转角检测装置50,能够利用由一对测距传感器34、35和车辆3中现有的旋转变压器36构成的简单的结构来检测车载单元41相对于地上单元21的横摆角α。
87.另外,为了计算车辆3的移动距离dv而使用旋转变压器36。由于旋转变压器36是用于检测电动马达31的控制所需的旋转角的旋转角传感器,因此在车辆3中是已有的,且高精度。因此,无需追加部件就能够高精度地计算移动距离dv。
88.另外,本实施方式的横摆角α的检测方法利用第一及第二测距传感器34、35和旋转变压器36,无需为了检测横摆角α而产生磁场。另外,第一及第二测距传感器34、35及旋转变压器36与受电电路42独立。因此,能够在充电期间检测由于停车后被其他车辆推动等理由
而可能产生的车辆3的横摆角α的偏差。另外,对于基于在下面的实施方式2中说明的方法de侧倾角β及俯仰角γ的检测,也能够相同地在充电期间执行。
89.如关于步骤s200的处理所说明的那样,第一及第二测距传感器34、35能够检测z轴方向位置。因此,不仅在停车时,而且为了在充电期间或其他用途中的车高的检测,也可以利用第一及第二测距传感器34、35。例如,能够检测车高随着人的乗降或货物的装卸而变化。另外,也可以使用第一测距传感器34或第二测距传感器35检测在充电期间车高(上述的z轴方向的相对位置)偏离规定值,而停止充电。
90.2.实施方式2
91.在实施方式2中,车辆用送电、受电系统1具备如下的旋转角检测装置60来代替旋转角检测装置50。作为车载单元41相对于地上单元21的相对旋转角,旋转角检测装置60计算在实施方式1中说明的横摆角α和侧倾角β及俯仰角γ。
92.2-1.旋转角检测装置的结构例
93.图10是表示实施方式2的旋转角检测装置60的结构的框图。旋转角检测装置60除了ecu33和第一及第二测距传感器34、35和旋转变压器36以外还具备第三及第四测距传感器38、39。
94.图11是用于说明图10所示的第三及第四测距传感器38、39的配置场所的图。图11是从车辆3的铅垂方向上的下方侧观察车载单元41时的立体图。
95.第一及第二测距传感器34、35的配置与实施方式1相同。接下来,与测距传感器34、35相同地,第三及第四测距传感器38、39分别以朝向z轴方向的下方侧、即朝向路面6的方式设置于车载单元41。即,因为第三及第四测距传感器38、39搭载于能够与地上单元21相向的车载单元41,因此在停车时能够与地上单元21相向。第三及第四测距传感器38、39分别检测其与路面6侧的距离d3及d4。更详细而言,第一~第四测距传感器34、35、38、39设置于车载单元41的壳体43的底面43a。
96.并且,第三测距传感器38和第四测距传感器39在车辆3的左右方向(y轴方向)上排列配置。并且,第三测距传感器38以在车辆3的前后方向(x轴方向)上从第一测距传感器34离开传感器间距离ds2的方式配置。相同地,第四测距传感器39也以在x轴方向上从第二测距传感器35离开传感器间距离ds2的方式配置。因此,第三测距传感器38与第四测距传感器39之间的距离也是传感器间距离ds1。
97.接下来,对图11所示的例子中的第一~第四测距传感器34、35、38、39与受电线圈44之间的具体的配置关系进行说明。如图11所示,当从车辆3的铅垂方向轴(z轴)的方向观察车载单元41时,第一~第四测距传感器34、35、38、39以包围受电线圈44的方式配置。作为补充,作为一例,车载单元41的壳体43的底面43a的基本形状为四边形。第一~第四测距传感器34、35、38、39配置于该底面43a的四角。
98.2-2.侧倾角β及俯仰角γ的计算方法的概要
99.参照图12a~图13b,分别对实施方式2的侧倾角β及俯仰角γ的计算方法进行说明。另外,横摆角α的计算方法与实施方式1相同。即,利用一对测距传感器34、35来计算横摆角α。另外,横摆角α也可以利用另一对测距传感器38、39通过相同的方法来计算。
100.首先,对侧倾角β的计算方法进行说明。图12a是从车辆3的后方侧观察车载单元41时的图。在图12a所示的一例中,车载单元41在以车辆3的右侧(纸面右侧)相对于左侧下降
的方式倾斜的状态下位于地上单元21的上方。地上单元21的顶面23a与路面6平行或实质上平行。
101.为了计算侧倾角β,ecu33计算第一差值a1。第一及第三测距传感器34、38位于与x轴平行的同一直线上,相同地,第二及第四测距传感器35、39也位于与x轴平行的其他同一直线上。第一差值a1是距离d1和距离d3的平均值与距离d2和距离d4的平均值的差值。
102.当得到了第一差值a1时,能够确定图12b所示的直角三角形。并且,在该直角三角形中,与长度为第一差值a1的边相向的内角与从x轴方向观察时地上侧的顶面23a与车辆侧的底面43a的夹角、即侧倾角β相等。并且,该直角三角形的斜边的长度与传感器间距离ds1相等。因此,能够基于以下的(2)式,计算将第一差值a1除以传感器间距离ds1的所得值的反正弦值作为侧倾角β。
103.β=arcsin(a1/ds1)
···
(2)
104.接下来,对俯仰角γ的计算方法进行说明。图13a是从车辆3的左侧观察车载单元41时的图。在图13a所示的一例中,车载单元41在以车辆3的后侧(纸面右侧)相对于前侧下降的方式倾斜的状态下位于地上单元21的上方。
105.为了计算俯仰角γ,ecu33计算第二差值a2。第一及第二测距传感器34、35位于与y轴平行的同一直线上,相同地,第三及第四测距传感器38、39也位于与y轴平行的其他同一直线上。第二差值a2是距离d1和距离d2的平均值与距离d3和距离d4的平均值的差值。
106.当得到了第二差值a2时,能够确定图13b所示的直角三角形。并且,在该直角三角形中,与长度为第二差值a2的边相向的内角与从y轴方向观察时地上侧的顶面23a与车辆侧的底面43a的夹角、即俯仰角γ相等。并且,该直角三角形的斜边的长度与传感器间距离ds2相等。因此,能够基于以下的(3)式,计算将第二差值a2除以传感器间距离ds2的所得值的反正弦值作为俯仰角γ。
107.γ=arcsin(a2/ds2)
···
(3)
108.2-3.ecu进行的处理
109.图14是表示与实施方式2的侧倾角β及俯仰角γ的检测相关的处理的流程的流程图。该流程图的处理也与图8相同地,在车辆3的停车开始时执行。
110.在图14中,ecu33(处理器33a)首先在步骤s300中,判定四个测距传感器34、35、38、39是否全部位于地上单元21的上方。该判定例如通过对距离d1~d4分别与阈值进行比较来进行。
111.在步骤s300的判定结果为否定的期间,ecu33反复执行步骤s300的处理。另外,在步骤s300的处理的开始后的预定时间内该判定结果不变成肯定的情况下,ecu33也可以中止本次的停车开始时的侧倾角β及俯仰角γ的检测处理。
112.另一方面,在步骤s300的判定结果为肯定的情况下,处理进入步骤s302。在步骤s302中,ecu33分别取得距离d1~d4。接下来,在步骤s304中,ecu33使用在步骤s302中取得的距离d1~d4分别计算上述的第一差值a1及第二差值a2。
113.在接着步骤s304的步骤s306中,ecu33将在步骤s304中计算出的第一差值a1除以已知的传感器间距离ds1的所得值的反正弦值(=arcsin(a1/ds1))作为侧倾角β而计算出。另外,ecu33计算将在步骤s304中计算出的第二差值a2除以已知的传感器间距离ds2的所得值的反正弦值(=arcsin(a2/ds2))作为俯仰角γ。
114.2-4.效果
115.以上说明的实施方式2的旋转角检测装置60为了检测侧倾角β及俯仰角γ,与实施方式1的旋转角检测装置50相比,追加地具备另一对测距传感器38、39。这样,根据旋转角检测装置60,利用简单的结构,在停车时不仅能够适当地检测横摆角α,还能够适当地检测侧倾角β及俯仰角γ。另外,不仅能够利用一对测距传感器34、35,还能够将另一对测距传感器38、39用于横摆角α的检测。
116.另外,为了计算第一差值a1,也能够使用距离d1及d3中的一方。关于这一点,在本实施方式的侧倾角β的计算方法中,使用距离d1及d3的平均值。这对于距离d2与距离d4的关系来说也是相同的。由此,能够减轻由各个测距传感器检测的距离偏差的影响,并且计算第一差值a1。另外,这对于俯仰角γ的计算方法中的第二差值a2的计算来说也是相同的。
117.另外,在从车辆3的铅垂方向(z轴方向)观察车载单元41时,本实施方式的第一~第四测距传感器34、35、38、39以包围受电线圈44的方式配置。由此,起到如下的效果。即,在停车时,可能产生侧倾角β与俯仰角γ双方。关于这一点,根据四个测距传感器34、35、38、39的上述配置,在产生了俯仰角γ的情况下,通过利用距离d1与d3的平均值,与仅利用距离d1或d3的情况相比,能够取得在车辆3的前后方向上接近受电线圈44的位置处的距离。也就是说,通过利用该平均值,在产生了俯仰角γ的情况下,能够检测接近受电线圈44的位置处的侧倾角β。这对于距离d2与d4的平均值的利用来说也是相同的。另外,相同的情况也可以适用于俯仰角γ的检测。
118.另外,在上述的实施方式1及2中,旋转角检测装置50及60应用于非接触方式的车辆用送电、受电系统1。但是,本公开的“旋转角检测装置”所应用的车辆用送电、受电系统也可以是接触方式。具体而言,接触方式的送电、受电系统例如也可以具备:车载单元,具备与地上侧连接器连接的车辆侧连接器;及地上单元,具备使该地上侧连接器与车辆侧连接器连接的机械臂。
119.另外,本公开的“旋转角检测装置”所应用的车辆用送电、受电系统也可以与上述的车辆用送电、受电系统1的例子相反,车载单元是送电单元,地上单元是受电单元。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1