一种基于激光点云数据的数据处理方法与流程
1.本发明涉及三维测量数据处理技术领域,尤其涉及一种基于激光点云数据的数据处理方法。
背景技术:
2.激光点云是利用激光在同一空间参考系下,获取目标物体表面每个采样点的空间坐标,以得到一系列表达目标空间分布和目标表面特性的海量点集合。随着自动驾驶技术的不断发展,越来越多的自动驾驶服务开始进入人们的生活圈。精确的定位对于自动驾驶的环境感知和路径规划等任务至关重要。
3.激光雷达被广泛应用于诸如自动驾驶控制系统的系统中,激光雷达采集的激光点云数据可用于建立模型进行环境感知。现有技术中采用自动驾驶地图进行定位,虽然该自动驾驶地图为高精度地图,但是在自动驾驶地图数据采集时,由于受采集环境的影响及现有设备精度的限制,对同一目标进行多次采集时,同一目标的多次采集激光点云数据会出现不重合的现象,导致数据存在误差,使得得到的自动驾驶地图的数据精度低。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种基于激光点云数据的数据处理方法。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种基于激光点云数据的数据处理方法,包括以下步骤:
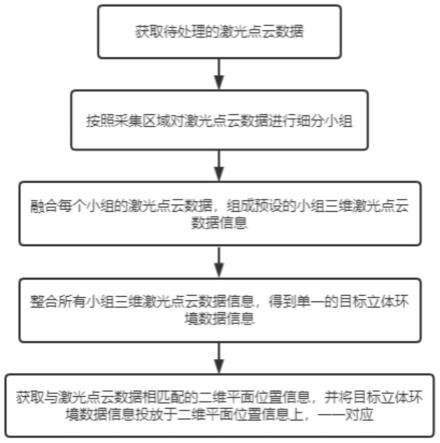
7.s1:获取待处理的激光点云数据;
8.s2:按照采集区域对激光点云数据进行细分小组;
9.s3:融合每个小组的激光点云数据,组成预设的小组三维激光点云数据信息;
10.s4:整合所有小组三维激光点云数据信息,得到单一的目标立体环境数据信息;
11.s5:获取与激光点云数据相匹配的二维平面位置信息,并将目标立体环境数据信息投放于二维平面位置信息上,一一对应;
12.所述激光点云数据包括所有激光点信息和三维数据。
13.优选地:所述采集区域包括用于对激光点云数据划分类别的大区块和用于依据大范围块划分类别作进一步采集区分的小区块。
14.优选地:所述融合每个小组的激光点云数据,具体包括以下内容:
15.a1:根据采集角度将重复的小区块归纳的采集区分内容进行删除;
16.a2:按照最新采集时间保留同一采集角度的采集区分内容,删除旧采集区分内容;
17.a3:按照不同采集角度将处理好的采集区分内容进行融合,以构成同一采集点的激光点云数据;
18.a4:根据二维平面中的位置关系,将不同采集点的激光点云数据进行拼合,组成同一小组三维激光点云数据信息。
19.优选地:所述按照不同采集角度将处理好的采集区分内容进行融合,包括以下内容:
20.b1:依据同一采集点,对相邻采集角度的激光点云数据进行划分重叠部分与非重叠部分的衔接分界线;
21.b2:以每帧采集图像上的衔接分界线为定点,覆盖相邻采集图像上的重叠部分为目的进行拼合;
22.b3:消除羽化融合拼接处。
23.优选地:所述激光点云数据的拼合需遵循原则为:
24.1)以相邻采集角度采集的图像重叠处数量多的为先;
25.2)以图像重叠处范围小的采集图像为主,删除对比后重叠范围大的采集图像。
26.优选地:所述大区块的类别划分依据包括同一采集地点、相同采集范围。
27.优选地:所述小区块的采集区分依据包括相同或邻近年/月/日采集时间、相同或邻近采集角度。
28.优选地:所述激光点信息包括与激光点相对应的激光标识、激光采集时间、采集距离点、水平角度以及水平分辨率;
29.所述激光标识为数字、字母。
30.本发明的有益效果为:
31.1.本发明先按照小组归类激光点云数据进行处理,最后按照不同采集角度,将保留的同一采集点的小区块区分激光点云数据进行融合,解决了对同一采集目标的多次采集数据时的数据信息繁杂、不重合的问题,提高了最后得到的数据精度。
32.2.本发明根据同一采集地点、相同采集范围等通过大区块对待处理的激光点云数据进行划分类别,然后通过小区块对每一类别的激光点云数据,按照相同或邻近采集时间、采集角度等作进一步采集区分,通过归类整理所有激光点云数据,使得目标清晰化,提高后期数据处理效率。
33.3.本发明相邻采集角度的激光点云数据上划分重叠部分与非重叠部分的衔接分界线,参考衔接分界线,以覆盖相邻采集图像上的重叠部分为目的进行拼合,最后消除羽化融合拼接处,得到高质量的环境数据信息,减少数据误差。
附图说明
34.图1为本发明提出的一种基于激光点云数据的数据处理方法的流程示意图。
具体实施方式
35.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
36.下面详细描述本专利的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本专利,而不能理解为对本专利的限制。
37.实施例1:
38.一种基于激光点云数据的数据处理方法,如图1所示,包括以下步骤:
39.s1:获取待处理的激光点云数据;
40.s2:按照采集区域对激光点云数据进行细分小组,首先按照小组归类激光点云数据进行处理,提高数据处理效率;
41.s3:融合每个小组的激光点云数据,组成预设的小组三维激光点云数据信息;
42.s4:整合所有小组三维激光点云数据信息,得到单一的目标立体环境数据信息;
43.s5:获取与激光点云数据相匹配的二维平面位置信息,并将目标立体环境数据信息投放于二维平面位置信息上,一一对应。
44.所述s1中的激光点云数据包括所有激光点信息和三维数据,以确保处理激光点云数据的完整性;
45.优选的,所述激光点信息包括与激光点相对应的激光标识、激光采集时间、采集距离点、水平角度以及水平分辨率等;
46.优选的,所述激光标识为用于区分每一帧中所有激光点分别对应的激光线束,激光标识可以为数字、字母等,达到能判断及确定采集物的目的。
47.所述s2中的采集区域包括用于对激光点云数据划分类别的大区块和用于依据大范围块划分类别作进一步采集区分的小区块;所述大区块的类别划分依据包括同一采集地点、相同采集范围等;所述小区块的采集区分依据包括相同或邻近年/月/日采集时间、相同或邻近采集角度等,使用时,根据同一采集地点、相同采集范围等通过大区块对待处理的激光点云数据进行划分类别,然后通过小区块对每一类别的激光点云数据,按照相同或邻近采集时间、采集角度等作进一步采集区分,通过归类整理所有激光点云数据,使得目标清晰化,提高后期数据处理效率。
48.所述s3中的融合每个小组的激光点云数据,具体包括以下内容:
49.a1:根据采集角度将重复的小区块归纳的采集区分内容进行删除,尽量确定采集角度采集内容的单一性;
50.a2:按照最新采集时间保留同一采集角度的采集区分内容,删除旧采集区分内容,不受同一区域的替换物体、消失物体、新增物体及遮挡物的影响,保证激光点云数据的使用准确性;
51.a3:按照不同采集角度将处理好的采集区分内容进行融合,以构成同一采集点的激光点云数据;
52.a4:根据二维平面中的位置关系,将不同采集点的激光点云数据进行拼合,组成同一小组三维激光点云数据信息。先按照采集角度处理小区块区分的激光点云数据,尽量确定采集角度采集内容的单一性,然后通过对同一采集角度的最新采集时间,删除该采集角度的其他小区块区分的激光点云数据,最后按照不同采集角度,将保留的同一采集点的小区块区分激光点云数据进行融合,以构成同一采集点的激光点云数据,然后根据二维平面中的位置关系,将不同采集点的激光点云数据进行拼合,组成同一小组三维激光点云数据信息。解决了对同一采集目标的多次采集数据时的数据信息繁杂,不便整合的问题。
53.本实施例在使用时,先获取待处理的激光点云数据,按照小组归类激光点云数据进行处理,具体为:根据同一采集地点、相同采集范围等通过大区块对待处理的激光点云数据进行划分类别,然后通过小区块对每一类别的激光点云数据,按照相同或邻近采集时间、采集角度等作进一步采集区分,通过归类整理所有激光点云数据,使得目标清晰化。
54.其次,先按照采集角度处理小区块区分的激光点云数据,尽量确定采集角度采集
内容的单一性,然后通过对同一采集角度的最新采集时间,删除该采集角度的其他小区块区分的激光点云数据,最后按照不同采集角度,将保留的同一采集点的小区块区分激光点云数据进行融合,以构成同一采集点的激光点云数据,然后根据二维平面中的位置关系,将不同采集点的激光点云数据进行拼合,组成同一小组三维激光点云数据信息。最后,整合所有小组三维激光点云数据信息,得到单一的目标立体环境数据信息,将之与二维平面位置信息相适配投放得到。
55.实施例2:
56.一种基于激光点云数据的数据处理方法,如图1所示,为了保证激光点云数据处理效果;本实施例在实施例1的基础上作出以下补充:所述a3中按照不同采集角度将处理好的采集区分内容进行融合,包括以下内容:
57.b1:依据同一采集点,对相邻采集角度的激光点云数据进行划分重叠部分与非重叠部分的衔接分界线;
58.b2:以每帧采集图像上的衔接分界线为定点,覆盖相邻采集图像上的重叠部分为目的进行拼合;
59.b3:消除羽化融合拼接处。
60.优选的,所述激光点云数据的拼合需遵循原则为:
61.1)以相邻采集角度采集的图像重叠处数量多的为先;
62.具体的,如图像1帧同时跟图像2帧...图像5帧均有重叠部分,而图像2帧...图像5帧上的重叠部分数量少于图像1帧,那么将与图像1帧有重叠部分的图像进行优先拼接,进而提高拼合效率。
63.2)以图像重叠处范围小的采集图像为主,删除对比后重叠范围大的采集图像。
64.具体的,如图像1帧与其他图像的重叠处范围较为窄小,图像2帧与其他图像的重叠处范围较大,甚至图像2帧的采集内容完全被其他图像的采集内容所包含,那么则可删除图像2帧。
65.在同一采集点,尤其是相邻采集角度的激光点云数据上划分重叠部分与非重叠部分的衔接分界线,参考衔接分界线,以覆盖相邻采集图像上的重叠部分为目的进行拼合,最后消除羽化融合拼接处,得到高质量的环境数据信息。
66.本实施例在使用时,在同一采集点,尤其是相邻采集角度的激光点云数据上划分重叠部分与非重叠部分的衔接分界线,参考衔接分界线,以覆盖相邻采集图像上的重叠部分为目的进行拼合,最后消除羽化融合拼接处,得到高质量的环境数据信息。
67.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1