基于自适应容错联邦滤波器的无人作战平台组合导航方法
本发明涉及无人作战平台导航领域,特别涉及一种基于自适应容错联邦滤波器的无人作战平台组合导航方法。
背景技术:
1、随着信息技术、智能技术、控制技术的迅猛发展,特别是微电子、计算机、通讯和互联网技术的长足进步,无人作战平台如今已成为世界各国争相研制的“热点”兵器。无人作战平台是指无人驾驶的、完全按遥控操作或按指定程序自主运作的、携带进攻性或防御性执行作战任务的一类武器平台,主要包括无人作战飞机、无人战车和无人潜水器。无人作战平台相比于现行有人作战平台持续能力强、成本低,且不易被雷达等探测手段捕捉,最为重要的是,他不以牺牲军人的生命为代价,有着无限的发展潜力。无人化技术的革新势必会引起军事领域的重大变革,可以预见的是,无人作战平台必将成为未来战场的主要作战方式。而导航作为其中至关重要的一环,对于无人作战平台在战场上以高抗干扰性能实现精确定位、精准打击有着不可或缺的作用。
2、在导航领域,以往最常用的导航方式是卫星导航和惯性导航。卫星导航具有全天候、高精度、实时提供矢量三维速度和位置信息等优势,但其受可观测卫星数影响,当处在遮蔽环境中时由于可观测星数目不足则会导致系统失灵。惯性导航因其不需要外部输入、完全自主的特点能够在任何环境中实现导航,但由于内部积分的影响其导航误差会随着时间慢慢累积,出现较大偏差。单一的导航系统都有着各自的劣势,一旦失灵则无法支持无人作战平台完成指定任务。后来,人们对组合导航进行研究,将卫星导航系统和惯性导航相结合,成为无人作战平台主流导航方式,它能将两种系统进行优势互补,以卫星系统修正惯导偏差,做到精准定位,但其在复杂环境下仍然难以保持其导航的精确性和稳定性,难以满足无人作战平台在复杂战场环境下巡航和火力打击任务的迫切需求。
技术实现思路
1、为解决上述技术问题,本发明提供了一种基于自适应容错联邦滤波器的无人作战平台组合导航方法,用来提高无人作战平台在复杂环境下导航的精确性和稳定性。本发明在渐消滤波的基础上对自适应因子进行重新设计,通过多重自适应因子对状态向量协方差中的具体元素分别进行动态调整,以达到更加精确的跟踪子滤波器估计状态,提升滤波精度的目的;对信息融合算法进行简化设计,降低原本复杂的计算量,避免因求逆运算而产生的奇异值现象;将机器学习引入故障检测机制,通过one-class svm对子系统进行故障检测,解决故障信息难以收集,故障数据集规模与正常状态数据集不对等的问题。本发明以多系统实现优势互补,提高系统容错性能,支持无人作战平台在复杂战场环境下实现精确导航,完成作战任务。
2、为达到上述目的,本发明的技术方案如下:
3、一种基于自适应容错联邦滤波器的无人作战平台组合导航方法,包括如下步骤:
4、(1)以捷联惯导系统作为参考系统,结合卫星导航系统、多普勒测速系统和天文导航系统,搭建联邦滤波组合导航系统,所述联邦滤波组合导航系统由三个子系统和一个主滤波器构成,所述三个子系统是由捷联惯导系统分别与卫星导航系统、多普勒测速系统和天文导航系统结合构成,分别为imu/gnss子系统、imu/dvl子系统和imu/cns子系统,各子系统中分别设置一个子滤波器;设计各子系统的状态量建立各子系统的状态方程和各子系统的观测方程;
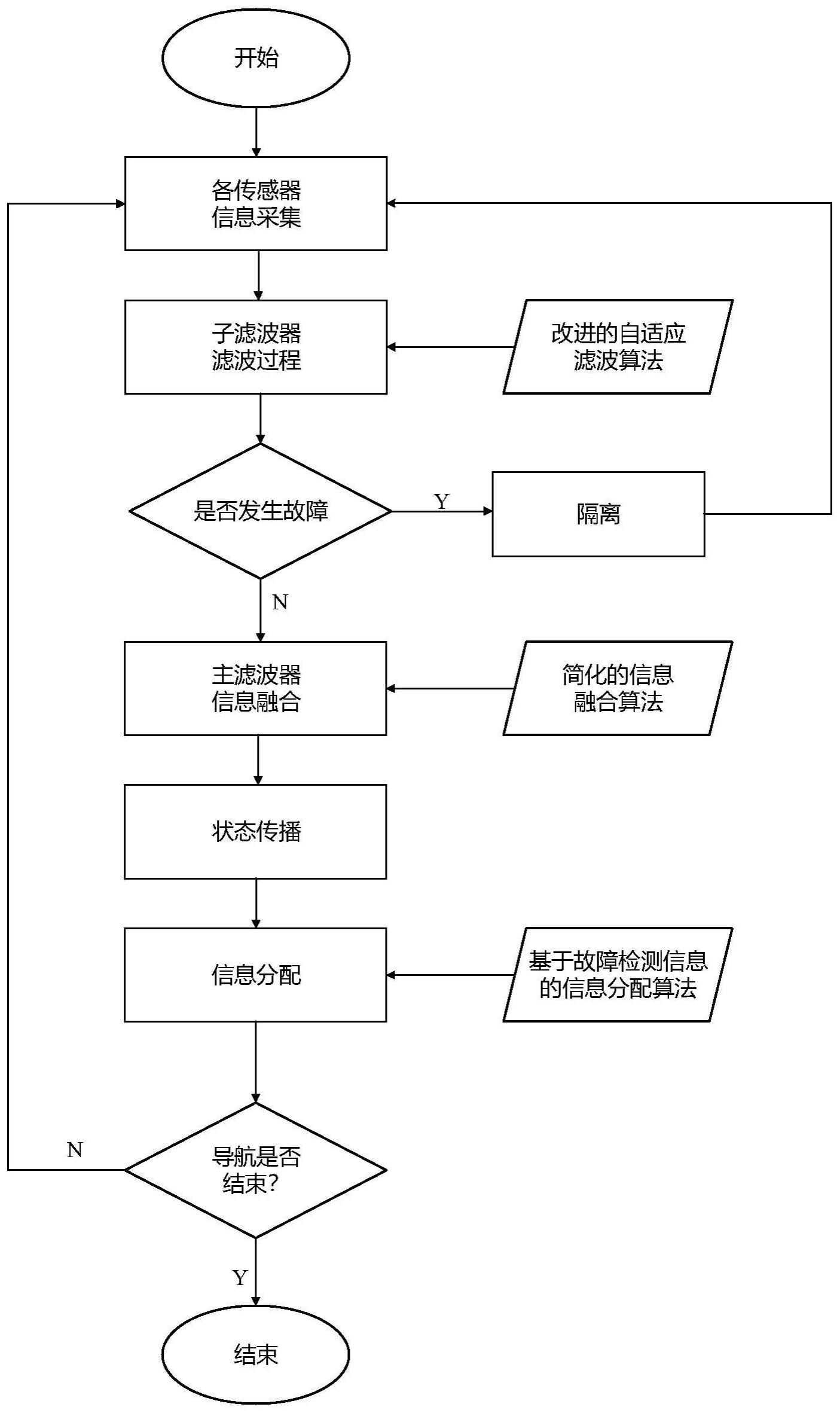
5、(2)通过卫星导航系统、多普勒测速系统和天文导航系统分别采集无人作战平台的观测信息,所述观测信息包括无人作战平台的位置、速度和姿态信息,三个子滤波器根据各子系统的状态方程和各子系统的观测方程以改进的自适应滤波算法对得到的观测信息分别进行滤波更新,得到各子系统的滤波估计值和协方差矩阵;
6、(3)采用one-class svm故障检测算法对步骤(2)中各子滤波器的滤波状态进行检测,判断各子系统是否发生故障,若存在故障则进行系统重构;
7、(4)将经过故障检测后的各子系统的滤波估计值进行信息融合得到主滤波器的状态估计值及其协方差矩阵,利用主滤波器的状态估计值结合捷联惯导系统输出的位置、速度和姿态信息,得到无人作战平台的位置、速度和姿态的总体估计量;
8、(5)采用信息分配算法进行信息分配,利用主滤波器的状态估计值和协方差矩阵重置各子系统的状态量和协方差矩阵,重复步骤(2)-(4)。
9、上述方案中,步骤(1)中,以捷联惯导系统作为参考系统,以卫星导航系统采集的位置信息、多普勒测速系统采集的速度信息和天文导航系统采集的姿态信息对捷联惯导系统的输出进行修正,以误差作为系统的状态量,状态量x如下:
10、
11、其中,δφe、δφn、δφu分别为导航坐标系下无人作战平台在东向、北向、天向上的姿态角误差,δve、δvn、δvu分别为无人作战平台在东向、北向、天向上的运动速度误差,δl为载无人作战平台所处位置的经度误差,δλ为无人作战平台的纬度误差,δh为无人作战平台的高度误差,εx、εy、εz分别为捷联惯导系统在无人作战平台坐标系下的陀螺仪漂移,分别为无人作战平台坐标系下的加速度计零偏。
12、进一步的技术方案中,步骤(1)中,子系统的状态方程如下:
13、xk=fk,k-1xk-1+wk
14、其中,xk-1、xk分别为k-1和k时刻的状态量,fk,k-1为k-1时刻到k时刻的状态转移矩阵,wk为k时刻的系统零均值高斯白噪声。
15、进一步的技术方案中,步骤(1)中,子系统的观测方程如下:
16、z=hxk+v
17、其中,z是系统观测误差,v是高斯白噪声,h是观测矩阵,xk为k时刻的状态量;
18、在imu/gnss子系统中,z是经纬高位置误差,h=[03×6 diag([1 1 1]) 03×6];在imu/dvl子系统中,z是东北天速度误差,h=[03×3 diag([1 1 1]) 03×9];在imu/cns子系统中,z是东北天姿态角误差,h=[diag([1 1 1]) 03×12]。
19、上述方案中,步骤(2)中,无人作战平台的位置信息包括位于无人作战平台上的各传感器采集的经度、纬度和高度信息;无人作战平台的速度信息为位于无人作战平台上的多普勒测速仪测得的东向、北向、天向速度信息;无人作战平台的姿态信息为天文导航系统解算得出的姿态角信息;
20、改进的自适应滤波算法通过多个自适应因子对所观测信息的状态量的协方差矩阵对应的方差值进行调整,未观测的状态量其对应协方差矩阵相应方差值则不进行调整;
21、自适应因子计算如下:
22、
23、其中,是系统实际误差协方差矩阵第i个对角线元素,是理论观测噪声协方差矩阵第i个对角线元素,是实际系统一步预测协方差矩阵第i个对角线元素。
24、上述方案中,步骤(3)中,采用one-class svm算法以系统残差作为输入进行故障检测,具体模型如下:
25、
26、s.t ω·φ(xi)+b+ξi≥0
27、ξi≥0,i=1,2,...,l
28、其中,ω是特征空间超平面法向量,b为平面截距,v代表能够容忍的最大误分类率,0<v<1,l代表数据集样本数量,φ(·)是非线性变换函数,xi是输入向量第i个元素,ξi是正则化参数,可作为部分样本数据被错误划分的代价。
29、上述方案中,步骤(3)中,若某个子滤波器发生故障,则将发生故障的子系统隔离,以剩余子系统重新搭建系统,采用卡尔曼滤波算法(kf)替代改进的自适应滤波算法(iakf)进行滤波更新。
30、上述方案中,步骤(4)中,采用简化的信息融合算法进行主滤波器融合,计算公式如下:
31、pi′=diag(diag(pi))
32、
33、
34、其中,pi是各子滤波器误差协方差阵,i为子滤波器的序号,pg是主滤波器误差协方差阵,xi是各子滤波器输入,xg为主滤波器输出状态量,pi′是只取pi的对角线元素后的矩阵。
35、上述方案中,步骤(5)中,信息分配算法以故障检测信息作为分配标准,计算如下:
36、
37、
38、
39、pi=βi-1pg i=1,2,3
40、xi=xg
41、其中,βi是自适应分配因子,i为子滤波器的序号,oi是子滤波器故障检测输出值,pg是主滤波器误差协方差阵,xi是各子滤波器输入,xg为主滤波器输出状态量。
42、通过上述技术方案,本发明提供的基于自适应容错联邦滤波器的无人作战平台组合导航方法具有如下有益效果:
43、(1)本发明采用联邦架构,以捷联惯导系统作为参考系统,通过卫星导航系统、多普勒测速系统、天文导航系统进行修正,构成组合导航系统,提高了系统的鲁棒性和抗干扰性能,提升了无人作战平台在复杂战场和强干扰环境下的导航性能。
44、(2)本发明采用一种改进的自适应滤波算法,能更好的跟踪子滤波器状态,提高系统滤波精度。
45、(3)本发明采用一种简化的信息融合算法,降低了信息融合过程中的计算量,避免了奇异值的出现而导致的系统失灵。
46、(4)本发明采用one-class svm算法进行故障检测,有效解决了故障信息难以获取、数据量小的缺点,能够更加及时、准确地识别系统故障,提升了系统的容错性能。
- 还没有人留言评论。精彩留言会获得点赞!