一种基于微夹持器的粘附力检测机构及其使用方法
1.本发明属于精密制造领域,尤其是涉及一种基于微夹持器的粘附力检测机构及其使用方法。
背景技术:
2.随着生物工程技术、微机电系统技术、微/纳技术及光学工程等领域的研究对象正朝着微细化方向发展,微夹持器作为对微小物体进行操作过程的末端执行器,在微机械零件的加工、装配、生物工程和光学等领域均有较好的应用前景。
3.由于微夹持器的操作对象具有轻、薄等特点,粘着是造成微小物体操作困难的最主要因素之一。由于表面效应,范德华力、毛细作用力、静电力等粘附力会出现拾取后无法稳定释放现象。由于释放是微夹持操作的重要阶段,其成功与否对整个过程起决定性作用,因此微小物体释放控制操作日益成为微操作领域的研究重点,需要寻找合适的方法消除粘着效应对其夹持操作的影响。针对这些问题,本发明提出了一种基于微夹持器的粘附力检测机构及其使用方法,该微夹持器粘附力检测机构及其使用方法结构简单、成本低、效率高。
技术实现要素:
4.本发明的目的在于提供一种基于微夹持器的粘附力检测机构及其使用方法,该微夹持器粘附力检测机构及其使用方法结构简单、成本低、效率高,在微夹持操作释放过程中可通过对压电陶瓷驱动器输入正弦动态电信号,从而使夹持臂产生振动,利用振动产生的惯性力实现粘附力的检测与控制,从而使微小物体实现正常释放。
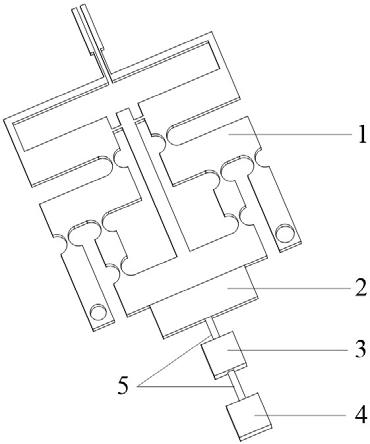
5.本发明采用的技术方案如下:一种基于微夹持器的粘附力检测机构,包括:微夹持器1、压电陶瓷堆2、压电驱动器3、控制器4以及传输电路5。
6.所述微夹持器1整体成左右对称结构,包括:夹持臂1-1、第一直角形柔性铰链1-2、第一正圆形柔性铰链1-3、第二正圆形柔性铰链1-4、第三正圆形柔性铰链1-5、第四正圆形柔性铰链1-6、第一固定端1-7、位移输入端1-8、第二固定端1-9、第五正圆形柔性铰链1-10、第六正圆形柔性铰链1-11、第七正圆形柔性铰链1-12、第八正圆形柔性铰链1-13以及第二直角形柔性铰链1-14。
7.所述压电陶瓷堆2通过传输电路5与压电驱动器3电性连接,并安装在微夹持器位移输入端1-8上,用于输入微幅振动,使微夹持器的夹持臂进行微幅振动从而使微小物体与其分离,实现释放操作。
8.所述压电驱动器3通过传输电路5与控制器4电性连接,控制器4控制压电驱动器3的输入电压值,从而控制微夹持器的夹持臂的振动幅值和频率。
9.所述第一固定端1-7与第二固定端1-9用于固定微夹持器。
10.本发明与现有技术相比,具有如下优点和有益效果:
1、本发明提供一种基于微夹持器的粘附力检测机构及其使用方法,当微小物体与微夹持器的夹持臂在粘附情况下,利用夹持臂振动带动微小物体振动产生的惯性力来实现粘附力的测量;2、本发明提供一种基于微夹持器的粘附力检测机构及其使用方法,在微夹持进行释放操作过程中,可通过对压电陶瓷驱动器输入动态电信号,使夹持臂进行微幅振动从而使微小物体与其分离;3、本发明提供一种基于微夹持器的粘附力检测机构及其使用方法,该夹持力检测机构及其使用放法结构简单、成本低、效率高。
附图说明
11.图1是本发明实施例提供的微夹持器的结构示意图。
12.图2是本发明实施例提供的基于微夹持器的粘附力检测机构整体装配结构示意图。
13.图3是本发明实施例提供的微小物体与夹持臂粘附示意图。
14.图中,1、微夹持器;1-1、夹持臂;1-2、第一直角形柔性铰链;1-3、第一正圆形柔性铰链;1-4、第二正圆形柔性铰链;1-5、第三正圆形柔性铰链;1-6、第四正圆形柔性铰链;1-7、第一固定端;1-8、位移输入端;1-9、第二固定端;1-10、第五正圆形柔性铰链;1-11、第六正圆形柔性铰链;1-12、第七正圆形柔性铰链;1-13、第八正圆形柔性铰链;1-14、第二直角形柔性铰链;2、压电陶瓷堆;3、压电驱动器;4、控制器;5、传输电路;6、微小物体。
具体实施方式
15.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
16.为了更好地理解本发明,下面结合附图对本发明作进一步地描述。
17.如图1-图2所示,一种基于微夹持器的粘附力检测机构,包括:微夹持器1、压电陶瓷堆2、压电驱动器3、控制器4以及传输电路5。
18.所述微夹持器1,包括:夹持臂1-1、第一直角形柔性铰链1-2、第一正圆形柔性铰链1-3、第二正圆形柔性铰链1-4、第三正圆形柔性铰链1-5、第四正圆形柔性铰链1-6、第一固定端1-7、位移输入端1-8、第二固定端1-9、第五正圆形柔性铰链1-10、第六正圆形柔性铰链1-11、第七正圆形柔性铰链1-12、第八正圆形柔性铰链1-13以及第二直角形柔性铰链1-14。
19.所述压电陶瓷堆2通过传输电路5与压电驱动器3电性连接,并安装在微夹持器位移输入端1-8上,用于输入微幅振动,使微夹持器的夹持臂进行微幅振动从而使微小物体与其分离,实现释放操作。
20.所述压电驱动器3通过传输电路5与控制器4电性连接,控制器4控制压电驱动器3的输入电压值,从而控制微夹持器的夹持臂的振动幅值和频率。
21.另一方面,本发明提供一种基于微夹持器的粘附力检测机构的使用方法,具体为:压电驱动器3驱动压电陶瓷堆2输出微位移,由于压电陶瓷堆2安装在微夹持器1的位移输入端1-8上,从而推动微夹持器第一正圆形柔性铰链1-3、第二正圆形柔性铰链1-4、
第三正圆形柔性铰链1-5、第四正圆形柔性铰链1-6、第五正圆形柔性铰链1-10、第六正圆形柔性铰链1-11、第七正圆形柔性铰链1-12、第八正圆形柔性铰链1-13、第一直角形柔性铰链1-2与第二直角形柔性铰链1-14产生弹性角位移,从而使微夹持器1的夹持臂1-1对微小物体6进行夹持操作,当微夹持器1张开其夹持臂1-1对微小物体6进行释放时,微小物体6由于其受到粘附力f1的作用使其与夹持臂1-1粘附在一起,如图3所示,从而使微小物体6不能进行正常释放。
22.通过控制器4对压电驱动器3施加正弦电信号u,使压电陶瓷堆2输出正弦振动位移,从而使微夹持器1的夹持臂1-1产生正弦微幅振动,带动微小物体6进行微幅振动,此时微小物体6振动产生惯性力f2,然后通过控制器4逐渐增加对压电驱动器3施加的正弦电信号u,从而使夹持臂1-1的正弦振动位移也逐渐增加,直到微小物体6正常释放脱落,此时微小物体6受到的粘附力f1等于微小物体6振动产生的惯性力f2,即f1=f2,微小物体6在振动过程中产生的微位移为d1,, fo与ao为正弦振动信号的频率与幅值,t为正弦振动信号的最小时间正周期,fo、ao和t与对压电驱动器3施加的正弦电信号u相关并可由实验得出,此时微小物体6振动产生的惯性力,m为微小物体的质量,从而可以得出微小物体6所受到的粘附力。
23.上述虽然结合附图对本发明的具体实施方式进行了描述,但并非对本发明保护范围的限制,所属领域技术人员应该明白,在本发明的技术方案的基础上,本领域技术人员不需要付出创造性的劳动即可做出的各种修改或变形仍在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1