集束装置终端光学组件成像系统及方法
1.本发明涉及大口径光学元件在线成像系统设计领域。
背景技术:
2.大型激光装置在进行惯性约束核聚变(inertial confinement fusion,icf)实验时,多束种子激光经过能量预放、整形、多程放大后在光路末端达到峰值,聚焦于真空靶室靶点,完成打靶实验。终端光学组件(final optics assembly,foa)位于整个光路的末端,由8块光学元件组成,因承受着非常高的激光能量,极易产生激光诱导损伤。这会导致元件自身性能变差,致使激光功率和能量水准不满足打靶需求,直接导致点火失败;同时损伤的存在使光束近场调制度增加,近场质量恶化,加大下游元件损伤风险;光学元件损伤过于严重会在实验中炸裂,飞溅的炸裂物污染整个靶室环境。导致严重实验事故,造成巨大经济损失;最后,终端光学元件价格异常昂贵,晶体加工周期漫长。综上所述,终端光学元件检测对保障装置负载能力、系统安全运行、提高激光打靶成功率、降低icf实验的运行成本有着重要意义。
3.某工程集束装置启动,建设完成后将会成为世界上规模最大的高能量激光装置。集束装置较某激光主机装置在终端组件部分有了较大的改动。为了提高单束激光能量,单束终端光学组件由8个子束按“口”字型排列组成,且光学元件间距很小,仅有2mm。以上变动导致需要检测的光学元件数量激增为主机装置的8倍,如果依旧采用主机装置对每块光学元件依次成像方式,即使各环节以最快速度运动,完成集束装置终端元件的检测也需要10小时以上,检测耗时过长。如果对8个子束全口径成像,成像的实际范围约2.2m,在保证分辨率的情况下,需要像素1.83万
×
1.83万个像素点,目前没有可以满足数量级的ccd像面,定制成本过高。如果采用8阵列ccd对应8个光学元件在同一平面成像的方式,由于8块光学元件之间的间距过小,ccd封装和外围电路板所占空间较大,ccd无法在同一像面排布开,无法在同一个平面收集8个像。
技术实现要素:
4.本发明的目的是为了解决目前对单束终端光学组件的成像检测速度慢的问题,提出了集束装置终端光学组件成像系统及方法。
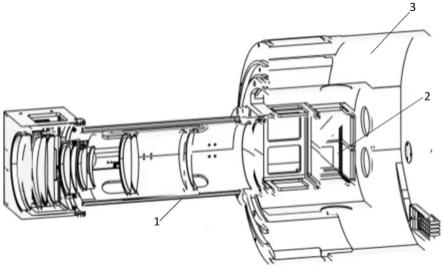
5.集束装置终端光学组件成像系统,所述系统包括成像物镜1、分光棱镜2和图像探测器3,
6.光学组件由8个子束按口字型排列组成,8个子束分别排布在口字型的4个顶点位置、口字型的上下边上、口字型的左右边上;其中排布在口字型的4个顶点位置的4个子束为第一组子束;排布在口字型的上下边上的2个子束为第二组子束;排布在口字型的左右边上的2个子束为第三组子束;
7.光学组件、成像物镜1、分光棱镜2和图像探测器3依次同轴排列;
8.图像探测器3包括6块探测芯片3-1;
9.4块探测芯片3-1与第一组子束内的4个子束位置相对,另外2块探测芯片3-1与4块探测芯片3-1垂直,且另外2块探测芯片3-1相对设置,
10.成像物镜1采集光学组件的像,将采集到的像输出至分光棱镜2,第一组子束的像经过分光棱镜2透射到对应的4块探测芯片3-1上,同时第二组子束的像或者第三组子束的像经过分光棱镜2反射到另外所述2块探测芯片3-1上,
11.将成像物镜1、分光棱镜2和图像探测器3一同绕光轴顺时针线旋转90
°
后,第三组子束的像或者第二组子束的像经过分光棱镜2反射到所述另外2块探测芯片3-1上,图像探测器3完成对8个子束图像的全部采集。
12.优选地,分光棱镜2包括2个三棱柱2-1和1个梯形台2-2;
13.2个三棱柱2-1的结构均相同,2个三棱柱2-1分别粘贴在梯形台2-2的两边,2个三棱柱2-1和1个梯形台2-2粘贴成长方体结构;
14.在每个三棱柱2-1与梯形台2-2的粘贴位置各镀一半反射膜和一半透射膜;
15.当两个粘贴位置与第二组子束内的2个子束的位置相对时,第一组子束的像经过分光棱镜2上的透射膜透射到对应的4块探测芯片3-1上,同时第二组子束中的2个子束的像各经过分光棱镜2上的1个反射膜反射到另外2块探测芯片3-1上,将成像物镜1、分光棱镜2和图像探测器3一同绕光轴顺时针线旋转90
°
后,两个粘贴位置与第三组子束内的2个子束的位置相对,第三组子中的2个子束的像各经过分光棱镜2上的1个反射膜反射到另外2块探测芯片3-1上,图像探测器3完成对8个口字型子束图像的全部采集;
16.当两个粘贴位置与第三组子束内的2个子束的位置相对时,第一组子束的像经过分光棱镜2上的透射膜透射到对应的4块探测芯片3-1上,同时第三组子束中的2个子束的像各经过分光棱镜2上的1个反射膜反射到另外2块探测芯片3-1上,将成像物镜1、分光棱镜2和图像探测器3一同绕光轴顺时针线旋转90
°
后,两个粘贴位置与第二组子束内的2个子束的位置相对,第二组子中的2个子束的像各经过分光棱镜2上的1个反射膜反射到另外2块探测芯片3-1上,图像探测器3完成对8个子束图像的全部采集。
17.优选地,图像探测器3还包括筒形壳体,
18.所述系统还包括环形连接件,
19.在筒形壳体的底部开设4个孔,且所述4个孔以筒形壳体的轴线为中心均匀开设,在筒形壳体的侧壁上对称开设2个孔,每个孔中嵌入一块探测芯片3-1,
20.环形连接件的环面与筒形壳体连接,成像物镜1从环形连接件内环伸入到筒形壳体内部,与筒形壳体内部的分光棱镜2连接,成像物镜1的外壁与环形连接件的内环壁连接。
21.优选地,图像探测器3采用立体阵列ccd相机实现,6块探测芯片3-1为6块ccd芯片。
22.根据集束装置终端光学组件成像系统实现的成像方法,所述方法包括以下步骤:
23.步骤1、控制模块控制六自由度机械手臂抓取调整成像物镜1、图像探测器3和分光棱镜2,将成像物镜1、图像探测器3和分光棱镜2送入真空靶室中心;
24.步骤2、对成像物镜1进行调焦、对焦,使成像物镜1对准第一组光学组件;
25.步骤3、开启第一组光学组件上的照明光源后,成像物镜1采集到第一组子束和第二组子束或者第三组子束的像,将该像输出至分光棱镜2;
26.步骤4、第一组子束的像经过分光棱镜2透射到对应的4块探测芯片3-1上,同时第二组子束的像或者第三组子束的像经过分光棱镜2反射到另外2块探测芯片3-1上;
27.步骤5、将将成像物镜1、分光棱镜2和图像探测器3一同绕光轴顺时针线旋转90
°
后,第三组子束的像或者第二组子束的像经过分光棱镜2反射到另外2块探测芯片3-1上;
28.步骤6、控制模块检测图像探测器3是否完成对第一组光学组件中8个子束图像的全部采集,如果否,则对成像物镜1进行调焦、对焦至第一组光学组件,重复执行步骤3至步骤6,直到完成对第一组光学组件中8个子束图像的全部采集,如果是,则执行步骤7;
29.步骤7、判断是否完成所有光学组件的检测,如果是,则利用控制模块控制六自由度机械手臂抓取调整成像物镜1、图像探测器3和分光棱镜2退出真空靶室,如果否,则利用控制模块控制六自由度机械手臂抓取调整成像物镜1、图像探测器3和分光棱镜2对准下一组光学组件,重复执行步骤2至步骤7,直到完成对所有光学组件的图像采集。
30.本发明的有益效果是:
31.针对某工程集束装置终端光学组件8子束成口字型紧密排布、数量庞大,目前单束全口径检测方式速度慢的问题,本技术提供了一种针对xx工程集束装置终端光学组件成像系统。
32.本技术采用立体阵列ccd相机与分光棱镜一体化设计,根据光学组件的8个子束排布方式,将立体阵列ccd相机阵列式设计,通过将成像物镜(1)、分光棱镜(2)和立体阵列ccd相机一同绕光轴旋转90
°
,即可对8个子束成像。该成像系统克服实际情况的各种约束,对光学组件(集束终端组件)达到最快的成像方式。相对于之前的单束全口径成像方式的速度提高了5倍。同时,优化的采集策略减少了ccd的使用数量,极大的节约了制作成本。
33.综上所述的种种限制,目前,某工程集束装置亟需根据自身终端组件排布方式设计的成像系统,可以在短时间内完成8个子束全口径光学元件的检测任务。
34.对于某工程集束装置终端光学组件成像问题,还没有专门的快速成像方法,本技术填补了本领域内一项技术空白。
附图说明
35.图1为集束装置终端光学组件成像系统的整体结构图;
36.图2为图1的剖视图;
37.图3为立体阵列ccd相机的结构示意图;
38.图4为分光棱镜的一个视角的结构示意图;
39.图5为分光棱镜的另一个视角的结构示意图;
40.图6为沿着光轴方向的分光棱镜的视角图;
41.图7为图6的右视图;
42.图8为集束装置终端光学组件成像系统的成像三维示意图;
43.图9为将成像物镜、分光棱镜和立体阵列ccd相机一同绕光轴顺时针线旋转90
°
后成像三维示意图;
44.图10为成像物镜和分光棱镜的工作示意图;
45.图11为光学组件由8个子束的结构示意图;
46.图12为集束装置终端光学组件成像系统的流程图。
具体实施方式
47.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
48.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
49.下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
50.具体实施方式一:结合图8至11说明本实施方式,本实施方式所述的集束装置终端光学组件成像系统,所述系统包括成像物镜1、分光棱镜2和图像探测器3,
51.光学组件由8个子束按口字型排列组成,8个子束分别排布在口字型的4个顶点位置、口字型的上下边上、口字型的左右边上;其中排布在口字型的4个顶点位置的4个子束为第一组子束;排布在口字型的上下边上的2个子束为第二组子束;排布在口字型的左右边上的2个子束为第三组子束;
52.光学组件、成像物镜1、分光棱镜2和图像探测器3依次同轴排列;
53.图像探测器3包括6块探测芯片3-1;
54.4块探测芯片3-1与第一组子束内的4个子束位置相对,另外2块探测芯片3-1与4块探测芯片3-1垂直,且另外2块探测芯片3-1相对设置,
55.成像物镜1采集光学组件的像,将采集到的像输出至分光棱镜2,第一组子束的像经过分光棱镜2透射到对应的4块探测芯片3-1上,同时第二组子束的像或者第三组子束的像经过分光棱镜2反射到另外所述2块探测芯片3-1上,
56.将成像物镜1、分光棱镜2和图像探测器3一同绕光轴顺时针线旋转90
°
后,第三组子束的像或者第二组子束的像经过分光棱镜2反射到所述另外2块探测芯片3-1上,图像探测器3完成对8个子束图像的全部采集。
57.本实施方式中,本技术中的光学组件也称为终端光学组件,光学组件包括8个子束,光学组件结构如图11所示,数字1至8表示8个子束。为了缩短成像时间,必须同时对尽量多的对一个光学组件中的子束成像。根据计算,位于光学组件4个角上的子束(5、6、7、8)间距较大,成像可以由排布在与光学组件平行的平面a上的4个ccd接收。针对剩余4块子束(1、2、3、4),其中1,2子束成像经分光棱镜的两个反射面,改变光路指向,将元件的成像反射到与平面a垂直的两个侧面b、c上,被安装在b、c面上的ccd接收。将成像物镜1、分光棱镜2和立体阵列ccd相机3同时旋转90
°
,左右两块子束3,4以同样的方式分别被侧面b、c两个ccd接收。8块光学元件成像全部被ccd接收。
58.本技术中的成像物镜1的作用是对光学组件进行成像,立体阵列ccd相机3作用是将这个相记录下来。
59.具体实施方式二:结合图4至7说明本实施方式,本实施方式是对具体实施方式一所述的集束装置终端光学组件成像系统进一步限定,在本实施方式中,分光棱镜2包括2个三棱柱2-1和1个梯形台2-2;
60.2个三棱柱2-1的结构均相同,2个三棱柱2-1分别粘贴在梯形台2-2的两边,2个三棱柱2-1和1个梯形台2-2粘贴成长方体结构;
61.在每个三棱柱2-1与梯形台2-2的粘贴位置各镀一半反射膜和一半透射膜;
62.当两个粘贴位置与第二组子束内的2个子束的位置相对时,第一组子束的像经过分光棱镜2上的透射膜透射到对应的4块探测芯片3-1上,同时第二组子束中的2个子束的像各经过分光棱镜2上的1个反射膜反射到另外2块探测芯片3-1上,将成像物镜1、分光棱镜2和图像探测器3一同绕光轴顺时针线旋转90
°
后,两个粘贴位置与第三组子束内的2个子束的位置相对,第三组子中的2个子束的像各经过分光棱镜2上的1个反射膜反射到另外2块探测芯片3-1上,图像探测器3完成对8个子束图像的全部采集;
63.当两个粘贴位置与第三组子束内的2个子束的位置相对时,第一组子束的像经过分光棱镜2上的透射膜透射到对应的4块探测芯片3-1上,同时第三组子束中的2个子束的像各经过分光棱镜2上的1个反射膜反射到另外2块探测芯片3-1上,将成像物镜1、分光棱镜2和图像探测器3一同绕光轴顺时针线旋转90
°
后,两个粘贴位置与第二组子束内的2个子束的位置相对,第二组子中的2个子束的像各经过分光棱镜2上的1个反射膜反射到另外2块探测芯片3-1上,图像探测器3完成对8个子束图像的全部采集。
64.本实施方式中,如图8所示,光学元件(5、6、7、8)分别与ccd芯片3-1(8、7、6、5)相对,左上角的光学元件5的像被右下角的ccd芯片5记录,右上角的光学元件6的像被左下角的ccd芯片6记录,左下角的光学元件7的像被右上角的ccd芯片7记录,右下角的光学元件8的像被左上角的ccd芯片8记录,因为像是倒立的,所以图8这样方式采集到光学组件成像。
65.当图8中分光棱镜2中的2个粘贴位置与光学元件1和2相对时,1位置的ccd芯片能够采集到光学元件1的像,2位置的ccd芯片能够采集到光学元件2的像;当将成像物镜1、分光棱镜2和立体阵列ccd相机3一同绕光轴顺时针线旋转90
°
后,如图9所示,分光棱镜2中的2个粘贴位置与光学元件3和4相对,此时4位置的ccd芯片能够采集到光学元件4的像,3位置的ccd芯片能够采集到光学元件3的像。
66.具体实施方式三:结合图1至图3说明本实施方式,本实施方式是对具体实施方式二所述的集束装置终端光学组件成像系统进一步限定,在本实施方式中,图像探测器3还包括筒形壳体,
67.所述系统还包括环形连接件,
68.在筒形壳体的底部开设4个孔,且所述4个孔以筒形壳体的轴线为中心均匀开设,在筒形壳体的侧壁上对称开设2个孔,每个孔中嵌入一块探测芯片3-1,
69.环形连接件的环面与筒形壳体连接,成像物镜1从环形连接件内环伸入到筒形壳体内部,与筒形壳体内部的分光棱镜2连接,成像物镜1的外壁与环形连接件的内环壁连接。
70.本实施方式中,成像物镜1、分光棱镜2和立体阵列ccd相机3组成如图1和图2的结构,形成一体结构。成像物镜1、分光棱镜2和立体阵列ccd相机3同轴设置。
71.具体实施方式四:本实施方式是对具体实施方式三所述的集束装置终端光学组件成像系统进一步限定,在本实施方式中,所述系统还包括指向角模块,
72.指向角模块,用于带动筒形壳体绕光轴旋转,使成像物镜1、分光棱镜2和图像探测器3一同绕光轴顺时针线旋转90
°
。
73.具体实施方式五:本实施方式是对具体实施方式三所述的集束装置终端光学组件成像系统进一步限定,在本实施方式中,所述系统还包括六自由度机械手臂和控制模块,
74.控制模块,用于控制六自由度机械手臂抓取调整成像物镜1、图像探测器3和分光
棱镜2,使成像物镜1、图像探测器3和分光棱镜2对准光学组件。
75.具体实施方式六:本实施方式是根据具体实施方式三所述的集束装置终端光学组件成像系统实现的成像方法,在本实施方式中,图像探测器3采用立体阵列ccd相机实现,6块探测芯片3-1为6块ccd芯片。
76.具体实施方式七:结合图12说明本实施方式,本实施方式是根据具体实施方式五所述的集束装置终端光学组件成像系统实现的成像方法,在本实施方式中,所述方法包括以下步骤:
77.步骤1、控制模块控制六自由度机械手臂抓取调整成像物镜1、图像探测器3和分光棱镜2,将成像物镜1、图像探测器3和分光棱镜2送入真空靶室中心;
78.步骤2、对成像物镜1进行调焦、对焦,使成像物镜1对准第一组光学组件;
79.步骤3、开启第一组光学组件上的照明光源后,成像物镜1采集到第一组子束和第二组子束或者第三组子束的像,将该像输出至分光棱镜2;
80.步骤4、第一组子束的像经过分光棱镜2透射到对应的4块探测芯片3-1上,同时第二组子束的像或者第三组子束的像经过分光棱镜2反射到另外2块探测芯片3-1上;
81.步骤5、将将成像物镜1、分光棱镜2和图像探测器3一同绕光轴顺时针线旋转90
°
后,第三组子束的像或者第二组子束的像经过分光棱镜2反射到另外2块探测芯片3-1上;
82.步骤6、控制模块检测图像探测器3是否完成对第一组光学组件中8个子束图像的全部采集,如果否,则对成像物镜1进行调焦、对焦至第一组光学组件,重复执行步骤3至步骤6,直到完成对第一组光学组件中8个子束图像的全部采集,如果是,则执行步骤7;
83.步骤7、判断是否完成所有光学组件的检测,如果是,则利用控制模块控制六自由度机械手臂抓取调整成像物镜1、图像探测器3和分光棱镜2退出真空靶室,如果否,则利用控制模块控制六自由度机械手臂抓取调整成像物镜1、图像探测器3和分光棱镜2对准下一组光学组件,重复执行步骤2至步骤7,直到完成对所有光学组件的图像采集。
84.本实施方式中,如图12的流程,通过控制模块,将成像系统送入某工程集束装置靶室中心,调节六自由度机械手臂,使成像系统对准48路光路中的第一路终端光学组件。
85.打开该光路第一组光学元件照明,调节调焦、对焦镜组,使成像系统对该光路第一组光学元件能够清晰对焦成像。5、6、7、8位置的光学元件成像直接被对应位置的阵列ccd采集到,1、2位置的光学元件成像经过分光棱镜反射,被两侧面的阵列ccd采集到。成像系统对1、2、5、6、7、8位置的光学元件完成图像采集。
86.成像系统绕光轴顺时针线旋转90
°
,成像系统对3、4位置的光学元件完成图像采集。关闭该光路第一组光学元件照明。
87.打开该光路第二组光学元件照明,调节调焦、对焦镜组,使成像系统对光学元件能够清晰对焦成像,重复第一组光学元件图像采集步骤,完成对第二组光学元件图像采集。重复上述工作,直到该子束光路8组光学组件全部采集完成。
88.调节六自由度机械手臂,使成像系统对准下一路光路,重复以上步骤,直到48路光学元件全部完成图像采集。
89.具体实施方式八:本实施方式是根据具体实施方式七所述的根据集束装置终端光学组件成像系统实现的成像方法,在本实施方式中,图像探测器3采用立体阵列ccd相机实现,探测芯片3-1为ccd芯片。
90.虽然在本文中参照了特定的实施方式来描述本发明,但是应该理解的是,这些实施例仅仅是本发明的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本发明的精神和范围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合不同的从属权利要求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其他所述实施例中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1