用于三维机织物横向剪切变形的实验装置、系统及方法
1.本技术涉及材料加工成型过程领域,具体涉及一种三维机织物横向剪切变形的实验装置、实验系统及实验方法。
背景技术:
2.三维机织复合材料结构通常由连续纤维增强复合材料成型而成。由于连续纤维增强复合材料具有优异的比强度、比模量等特点,其在航空航天领域中的应用持续增加,并呈现出由次承力结构件向主承力结构件、由简单平板构件向复杂曲面构件转变等趋势。复杂几何外形的三维机织复合材料结构的主要成型工艺是树脂传递模塑成型(rtm)。即,首先通过模具将平板形状的连续纤维增强复合材料预成型为复杂曲面形状的预制体;然后将树脂注入含有预制体的封闭模具,经过树脂固化后得到具有复杂曲面的三维机织复合材料构件(以下简称为三维机织物)。在预成型阶段中,三维机织物经历了面内剪切、横向剪切、横向压缩等非线性大变形行为。同时,这些变形行为之间存在各种耦合,其对预制体的成型质量和最终复合材料构件的力学性能和具有重要影响。
3.由于三维机织物的厚度一般较大,预成型过程中的横向剪切变形十分明显,因此不能忽略。同时,三维机织物受到横向压缩力的影响,会导致纤维体积系数增大,进而影响横向剪切刚度。因此,准确表征横向压缩与横向剪切的耦合行为十分必要。为此,针对三维机织物的横向压缩与横向剪切耦合变形需要专门的实验装置,从而获得不同横向压力状态下的横向剪切行为,进而为预成型仿真提供参数输入。这对提高三维机织复合材料结构的成型质量和强度具有重要意义。
4.现有技术中,对于三维机织物的横向剪切变形实验,一种方式是采用结构简单的横向剪切夹具,将三维机织物粘在夹具的夹板上,然后实验机进行拉伸以实现三维机织物的横向剪切变形,通过载荷-位移曲线推导出横向剪切应变能函数中的参数。另一种方式是采用导向杆将织物试件固定在两块平行板上,以保证在试件安装过程中准确施加沿其厚度方向的横向压力,进而对试件施加纯剪应变,然后根据横向剪应变建立横向剪应变能密度函数。还有一种方式是采用横向剪切夹具,该夹具释放了试件在厚度方向上的自由度,以防止在横向剪切变形过程中由于纱线滑移等变形产生的试件变薄导致的误差。
技术实现要素:
5.为了解决现有的实验装置中存在的横向压力大小不可控、没有考虑三维机织物在横向剪切变形过程中与横向压力的耦合机制等问题,本技术旨在提供一种用于三维机织物横向剪切变形的实验装置、实验系统及实验方法。
6.根据本技术的第一示例实施例,用于三维机织物横向剪切变形的实验装置包括:
7.施压模块,包括:
8.压力传感器,被配置为实时显示横向压力;
9.施压板,一侧与所述压力传感器相连;
10.基座,与所述施压板相连,其上设置第一接头;
11.旋转进给部件,穿过所述基座与所述压力传感器相对设置,被配置为通过所述旋转进给部件向所述压力传感器施加所述横向压力;
12.调节模块,包括:
13.调节板,与所述基座相连;
14.第二接头,与所述调节板相连;
15.顶紧模块,与所述调节板背离所述施压板的一侧相接触,并可拆卸地固定于所述基座上;
16.所述施压板和/或所述调节板通过第一导引部件沿所述基座滑动从而调节两者之间距离。
17.根据本技术的一些实施例,所述基座包括:
18.水平基座,其上设置第二导引部件,与所述第一导引部件配合;
19.竖直基座,与所述水平基座竖直相连,其上设置螺纹导柱,所述旋转进给部件穿过所述螺纹导柱。
20.根据本技术的一些实施例,所述螺纹导柱上的螺纹具有自锁特性。
21.根据本技术的一些实施例,所述顶紧模块包括:
22.顶板,与所述调节板背离所述施压板的一侧相接触;
23.连接座,与所述顶板相连,环套于所述水平基座上并能够沿所述水平基座移动。
24.根据本技术的一些实施例,所述实验装置还包括:
25.第三导引部件,连接于所述施压板与所述顶板之间。
26.根据本技术的一些实施例,所述第一导引部件包括导引台;所述第二导引部件包括导引槽;所述第三导引部件包括导向杆。
27.根据本技术的一些实施例,所述调节板包括:
28.滑槽,所述第二接头通过所述滑槽与所述调节板相连,并能够沿所述滑槽调节位置。
29.根据本技术的一些实施例,所述施压板的所述第一导引部件与所述第二导引部件间隙配合。
30.根据本技术的另一方面,还提供一种用于三维机织物横向剪切变形的实验系统,包括:
31.拉力机;
32.上述实验装置,通过所述第一接头固定于所述拉力机上;
33.所述拉力机通过所述第二接头向所述调节板施加拉力,并且保持所述拉力机的轴线处于所述三维机织物的中轴面上。
34.根据本技术的另一方面,还提供一种用于三维机织物横向剪切变形的实验方法,使用上述实验系统,所述实验方法包括:
35.将所述三维机织物固定于所述调节板的内侧,转动所述旋转进给部件将所述施压板压紧所述三维机织物的另一侧;
36.调整所述调节板、所述顶板以及所述施压板的位置,从而保证所述拉力机的轴线在所述三维机织物的中轴面内;
37.根据所述压力传感器的数值,调节所述旋转进给部件从而施加稳定的横向压力;
38.所述拉力机通过所述第二接头向所述调节板施加拉伸力,所述三维机织物随着所述调节板的移动而发生剪切变形;
39.输出所述拉伸力与所述剪切变形之间的相关曲线以及施加的所述横向压力。
40.本技术提供的用于三维机织物横向剪切变形的实验装置,只需要简单的旋转,就可以三维机织物厚度方向上施加横向压力,施压操作简便;通过压力传感器的实时显示与旋转进给部件相结合,从而控制所施加的横向压力;根据压力传感器示数进行旋转,施压过程更为直观;基座上连接旋转进给部件的螺纹具有自锁特性,能够防止试件处的反作用力导致的旋转进给部件自转,避免横向压力不准确。通过调节施压板和调节板之间的距离,可以适用于不同厚度的试件。
附图说明
41.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图,而并不超出本技术要求保护的范围。
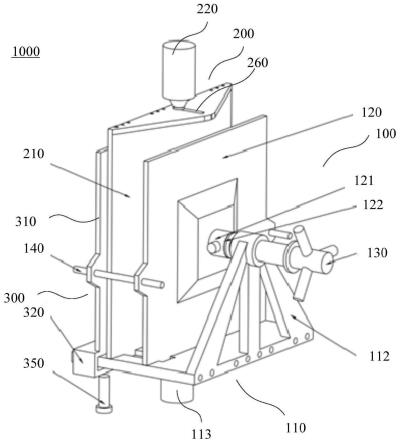
42.图1示出了根据本技术示例实施例的用于三维机织物横向剪切变形的实验装置示意图;
43.图2示出了根据本技术示例实施例的三维机织物试件装夹后的实验装置示意图;
44.图3示出了根据本技术示例实施例的施压模块示意图;
45.图4示出了根据本技术示例实施例的基座示意图;
46.图5示出了根据本技术示例实施例的调节模块示意图;
47.图6示出了根据本技术示例实施例的三维机织物固定示意图;
48.图7示出了根据本技术示例实施例的顶紧模块示意图;
49.图8示出了根据本技术示例实施例的用于三维机织物横向剪切变形的实验系统示意图;
50.图9示出了根据本技术示例实施例的实验原理示意图;
51.图10示出了根据本技术示例实施例的用于三维机织物横向剪切变形的实验方法流程;
52.图11示出了根据本技术示例实施例的三维机织物横向剪切变形与横向压力耦合机制示意图。
具体实施方式
53.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
54.本技术的术语“第一”、“第二”等是用于区别不同对象,而不是用于描述预定顺序。此外,术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一
系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或单元。
55.在本文中提及“实施例”意味着,结合实施例描述的预定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
56.本发明人发现,针对三维机织物的横向剪切实验,现有的实验装置一方面不能控制横向压力的大小,进而无法获得横向压缩变形对横向剪切变形的影响;另一方面,无法获得三维机织物在横向剪切变形过程中与横向压力的耦合机制的相关数据。为了解决现有的实验装置中存在的上述问题,本技术提供了一种用于三维机织物横向剪切实验的实验装置、实验系统及实验方法,通过简易操作即可实现横向压力的可控,并且能够获得不同横向压力状态下的横向剪切变形行为,从而为探究三维机织物横向压缩-横向剪切耦合变形提供更准确的应变能函数与本构模型,进而更精确地预测三维机织物在预成型过程中的变形行为。
57.下面将结合附图,详细介绍本技术的技术方案。
58.图1示出了根据本技术示例实施例的用于三维机织物横向剪切变形的实验装置示意图;图2示出了根据本技术示例实施例的三维机织物试件装夹后的实验装置示意图。
59.如图1和图2所示,本技术提供的用于三维机织物横向剪切变形的实验装置1000包括:施压模块100、调节模块200和顶紧模块300。实验过程中,三维机织物的试件400固定于施压模块100和调节模块200之间。根据本技术的一些实施例,三维机织物试件可以采用粘接的方式固定,本技术对此不作限制。
60.其中,施压模块100用于向三维机织物试件的厚度方向施加横向压力。施压模块100包括基座110、施压板120、旋转进给部件130。参见图1,基座110与施压板120相连。基座110上设置第一接头113,位于基座110的水平中心,其功能在于与拉力机的连接接头相连,将该实验装置固定在拉力机上,能够保证基实验装置1000在拉力机中的位置对中性。旋转进给部件130穿过基座110,基座110对旋转进给部件130起到支撑作用。通过转动旋转进给部件130可以向施压板120施加横向压力。施压板120上设置压力传感器121,用于实时显示横向压力。施压板120的一侧与压力传感器121相连。旋转进给部件130穿过基座110与压力传感器121相对设置。通过旋转进给部件130可以向压力传感器121施加横向压力。压力传感器121的实时显示与旋转进给部件130相结合,从而实现通过简单的操作来控制所施加的横向压力。
61.调节模块200包括调节板210和第二接头220。调节板210与施压模块100的施压板120相配合,从而将三维机织物试件在厚度方向上固定。第二接头220与调节板210相连。外部的拉力机通过第二接头220向调节板210施加拉力,驱动调节板210向上移动,从而使得固定在调节板210与施压板120之间的三维机织物发生剪切变形。调节板210与基座110相连,基座110对调节板210起到支撑作用。施压板120和/或调节板210可以通过第一导引部件(详见图2和图4及相关描述)沿基座110滑动,从而调节两者之间距离。进一步地,通过调节施压板120和调节板210之间的距离,使得该实验装置1000能够适用于不同厚度的三维机织物试
件。
62.顶紧模块300与调节板210背离施压板120的一侧相接触,并且可拆卸地固定于基座110上,例如,确定好位置后通过螺钉350与基座110固定连接,其功能在于平衡施压板120施加在三维机织物厚度方向的压力传递到调节板210上的力矩。参见图1,顶紧模块300与施压板120之间还可以设置第三导引部件140,从而保证在试件安装过程中准确施加沿其厚度方向的横向压力。根据本技术的示例实施例,第三导引部件可以是一组导向杆140。
63.图3示出了根据本技术示例实施例的施压模块示意图;图4示出了根据本技术示例实施例的基座示意图。
64.如前所述,施压模块100包括基座110、施压板120、旋转进给部件130。参见图3,基座110包括水平基座111和与之竖直相连的竖直基座112。水平基座111用于为施压板120提供支撑,竖直基座112用于为旋转进给部件130提供支撑。实验装置固定在拉力机上时,位于水平基座111中心的第一接头能够保证实验装置在拉力机上的对中位置。水平基座111上设置第二引导部件114。根据本技术的示例实施例,第二引导部件114可以是一组导引槽(例如滑移槽)。通过滑移槽,能够调节用于固定三维机织物的施压板120和调节板的位置,从而适用于不同厚度的三维机织物的横向剪切实验。竖直基座112上还可以设置螺纹导柱115。旋转进给部件130穿过螺纹导柱115,从对旋转进给部件130起到支撑作用,进而保证实验装置的结构稳定性。根据本技术的另一些实施例,螺纹导柱115可以采用具有自锁特性的螺纹。螺纹的自锁特性能够防止试件处的反作用力导致的旋转进给部件130自转,从而避免横向压力不准确。
65.参见图3,施压板120通过第一导向部件123与水平基座111相连。第一导引部件123与第二引导部件114相配合。根据本技术的示例实施例,第一引导部件123可以是一组导引台(例如,凸台)。通过凸台与滑移槽的配合,使得施压板120能够沿着水平基座111滑动,进而调整位置。根据本技术的一些实施例,施压板120的第一导引部件123与水平基座111的第二导引部件114可以采用间隙配合。通过间隙配合能够保证在向试件的厚度方向施加横向压力时施压板的垂直度。根据申请的一些实施例,施压板的两侧可以设置一组带通孔的凸耳。第三导引部件114穿过凸耳上的通孔与顶紧模块相连。根据本技术的一些实施例,第三导引部114可以是一组导向杆。通过设置导向杆,能够保证在试件安装过程中准确施加沿其厚度方向的横向压力。
66.如图3所示,旋转进给部件130上可以是设置手柄131的旋柄,便于实验人员操作。旋转进给部件130上还可以设置挡板132,其作用在于限制旋转进给部件130的进给量,以避免进给量过大而损坏试件与试验装置。旋柄130与基座上的螺纹导柱通过螺纹配合,实现旋转进给,进而向压力传感器121施加压力。旋柄130穿过螺纹导柱115后可以通过传感器保护片122(例如,垫片)与压力传感器121接触并施压,从而能够保护压力传感器不被旋柄破坏,并且使压力示数更加稳定。根据压力传感器121的示数可以确定横向压力大小,进而可以通过调节旋柄130的进给来控制施加的横向压力。
67.图5示出了根据本技术示例实施例的调节模块示意图;图6示出了根据本技术示例实施例的三维机织物固定示意图。
68.如前所述,调节模块200包括调节板210和第二接头220。根据本技术的一些实施例,调节板210与水平基座相连的一端与也可以设置导引部件211(例如,导引台),其与水平
基座上的滑移槽配合,可以沿着滑移槽滑动进而调整位置。参见图5,调节板210通过连接板230与第二接头220相连。连接板230上设置滑槽260,第二接头220通过滑槽260与调节板210相连,并能够沿滑槽260调节位置。根据本技术的一些实施例,滑槽260的形状可以是矩形,本技术对此不作限制。矩形滑槽能够保证实验过程中,拉力机的轴线处于不同厚度三维机织物的中轴面上,从而避免在横向剪切过程中试件因受到力矩的影响而产生误差。
69.实验过程中,三维机织物试件的固定安装如图6所示。三维机织物试件粘贴在调节板210上后,可以沿矩形滑槽移动,调整与施压板120之间的距离,以适应不同厚度的试件。施压板120在旋转进给部件施加的压力下向着调节板210的方向推移,从而将三维机织物试件粘接固定在调节板210于施压板120之间。通过拧紧第二接头与滑槽260连接处的调节螺母250并压紧垫片240从而固定调节板210的位置。至此,完成三维机织物试件的固定。随后,可以通过旋柄向三维机织物试件施加厚度方向的压力,从而对不同压力状态下的三维机织物的横向剪切变形行为进行实验。
70.图7示出了根据本技术示例实施例的顶紧模块示意图。
71.参见图7,顶紧模块300包括顶板310和与之相连的连接座320。组装完成后,顶板310与调节板背离施压板的一侧相接触,其功能在于平衡施压板施加在试件厚度方向上的压力传递到调节板上的力矩。连接座320可以环套于水平基座上并能够沿水平基座移动,以配合调节板的位置调整。位置调整后,通过拧紧固定螺栓350将顶紧模块300在水平基座上的位置固定,从而保证在横向剪切过程中不产生多余的力矩。顶板310的两侧可以设置一组带通孔的凸耳330,施压模块的导向杆可以依次穿过施压上的凸耳、顶板310上的凸耳330,从而连接于施压板与顶板310之间。
72.图8示出了根据本技术示例实施例的用于三维机织物横向剪切变形的实验系统示意图;图9示出了根据本技术示例实施例的实验原理示意图。
73.根据本技术的另一方面,还提供一种用于三维机织物横向剪切变形的实验系统3000。参见图8,实验系统3000包括上述实验装置1000和拉力机2000。实验装置1000通过第一接头113固定于拉力机上。拉力机2000通过实验装置1000的第二接头220向调节板210施加拉力进行横向剪切变形实验,并且在此过程中保持拉力机2000的轴线处于三维机织物试件的中轴面上。根据本技术的示例实施例,拉力机可以是电子万能试验机,或者其他可以提供拉伸力的试验机,本技术对此不作限制。
74.在实验过程中,三维机织物试件可以粘贴安装在调节板210的中心位置;在施压板120的工作区域进行涂胶,然后在旋转进给部件130的推力作用下,施压板120沿着导向杆140靠近并压紧三维机织物。通过调整调节板210的位置,可以保证电子万能试验机的轴线在试件的中轴面内。在施加横向压力的过程中,可以通过压力传感器121确定向三维机织施加的横向压力。调节板210、顶板310的位置调整、固定后,通过旋转进给部件,控制其向压力传感器121的示值是实验所需压力的2倍,即顶板310与调节板210之间的压力等于实验所需的横向压力。调节板210在电子万能试验机2000夹头的带动下相对于施压板120向上移动,通过电子万能试验机2000可以记录三维机织物在横向压力作用下的剪切变形过程中的力。
75.图9(a)中示出了三维机织物试件在实验过程中的受力状态,图9(b)示出了调节板210的受力状态。在三维机织物试件400横向剪切过程中,三维机织物试件400厚度方向纤维会随调节板210的上移而伸长,产生沿厚度纤维方向的拉伸力f
l
。横向剪切角度θ可以根据
下述公式(1)获得,其中x为调节板210的竖向位移,t为三位机织物试件400的厚度。但是,由于横向剪切角度θ一般较小,且沿厚度方向的拉伸刚度较低,横向剪切角θ引起的厚度方向的拉伸力f
l
较小,因此可以忽略。
76.以调节板210为例,其主要受力如图所示:竖直方向受力包括:电子万能试验机提供的拉力f、顶板与调节板210之间的摩擦力ff、三维机织物试件400厚度方向纤维拉伸力f
l
、三维机织物试件400与调节板210之间的横向剪切力fs;水平方向受力包括:横向压力fn、三维机织物试件400与调节板210之间的压力fc。针对顶板与调节板210之间的摩擦力,通过现有的测量方法可以确定顶板与调节板210之间的摩擦系数μ。根据电子万能试验机输出的载荷f与公式(2)可以获得作用在三维机织物试件400上的剪切力fs。
[0077][0078]fs
=f-f
l
sinθ-μfnꢀꢀꢀ
(2)
[0079]
图10示出了根据本技术示例实施例的用于三维机织物横向剪切变形的实验方法流程;图11示出了根据本技术示例实施例的三维机织物横向剪切变形与横向压力耦合机制示意图。
[0080]
根据本技术的另一方面,还提供一种用于三维机织物横向剪切变形的实验方法,参见图10,该实验方法包括以下步骤。
[0081]
步骤s110,将三维机织物固定于调节板的内侧,转动旋转进给部件将施压板压紧三维机织物的另一侧。在实验开展前,首先将三维机织物试件固定在实验装置上。例如,将三维机织物试件粘贴在涂胶了的调节板的内侧,安装两根导向杆后,手动进给旋转进给部件,将三维机织物试件的另一侧与涂胶后的施压板贴紧。由此,完成三维机织物的固定。
[0082]
步骤s120,调整调节板、顶板以及施压板的位置,从而保证拉力机的轴线在三维机织物的中轴面内。完成三维机织物试件的固定后,可以根据需要,调整调节板、顶板以及施压板的位置,从而保证拉力机的轴线在三维机织物的中轴面内。
[0083]
步骤s130,根据压力传感器的数值,调节旋转进给部件从而施加稳定的横向压力。通过转动旋转进给部件并根据压力传感器显示的数值,控制施加的横向压力。待压力传感器的示数稳定后,拧紧固定螺栓从而固定顶板的位置。至此,完成三维机织物横向压力的施加。
[0084]
步骤s140,拉力机通过第二接头向调节板施加拉伸力,三维机织物随着调节板的移动而发生剪切变形。调整拉力机的载荷归零,可以设置拉力机以2mm/min的拉伸速度,开始横向剪切实验。
[0085]
步骤s150,输出拉伸力与剪切变形之间的相关曲线以及施加的横向压力。如图11所示,分别示出了不同横向压力f
n1
、f
n2
、f
n3
下的载荷fs与位移x之间的相关曲线,其中f
n1
<f
n2
<f
n3
,f
n1
=0。横向压力下的载荷-位移曲线,能够准确表征横向压缩与横向剪切的耦合行为,进而可以对探究不同横向压力状态下的横向剪切行为,为三维机织物预成型仿真提供参数输入。
[0086]
本技术提供的用于三维机织物横向剪切变形的实验装置,只需要简单的旋转,就可以三维机织物厚度方向上施加横向压力,施压操作简便;通过压力传感器的实时显示与旋转进给部件相结合,从而控制所施加的横向压力;根据压力传感器示数进行旋转,施压过
程更为直观;基座上连接旋转进给部件的螺纹具有自锁特性,能够防止试件处的反作用力导致的旋转进给部件自转,避免横向压力不准确。
[0087]
本技术提供的用于三维机织物横向剪切变形的实验装置,通过调节施压板和调节板之间的距离,可以适用于不同厚度的试件。三维机织物的剪切力的表征精度与实验装置同拉力机之间的安装精度有关。在实验过程中,通过调节模块设置的滑槽,能够保证拉力机的轴线一直处于三维机织物的中轴面内,安装精度及对中性易于保证,从而避免三维机织物受到力矩作用,避免因受力不均造成的剪切力误差。
[0088]
以上对本技术实施例进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明仅用于帮助理解本技术的方法及其核心思想。同时,本领域技术人员依据本技术的思想,基于本技术的具体实施方式及应用范围上做出的改变或变形之处,都属于本技术保护的范围。综上所述,本说明书内容不应理解为对本技术的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1