使用光通信定位与行人航位推算的方法、系统和电子设备
1.本发明涉及定位技术,且更具体地说,涉及使用可见光通信定位以及行人航位推算以定位电子设备及持有所述电子设备的用户的定位方法、定位系统及电子设备。
背景技术:
2.行人航位推算(pedestriandeadreckoning,pdr)是一种惯性导航系统,它依靠智能手机传感器来估计行人的步数运动。然而,由于传感器读数中的漂移和固有噪声,这种系统的精度很差。此外,行人的步长变化和设备的异构性为构建可扩展的pdr系统带来了进一步的难度。
3.pdr依赖于智能手机内置的传感器。pdr也是几乎所有室内定位技术的关键组成部分,因为它不需要任何其他的基础设施。然而,由于pdr依赖于基于步数的位置估计,其准确性依赖于对行人步数和前进方向的正确估计。步数的估计容易受到行人步数和步行模式变化的影响。此外,航向(行人的前进方向)通常会通过智能手机内置的罗盘来估计,该罗盘依赖于磁强计和加速度计,并且容易受到建筑物的金属结构和附近的金属物体和电器的影响,从而产生了误差。因此,经由传统的pdr所获得的每个位置推算都会积累误差,必须使用其他惯性定位系统(inertialpositioningsystem,ips)技术来进行校准,如wifi、蓝牙、地磁、声学或基于传感器的地标检测等等的ips技术。
4.然而这些ips技术所导致的问题是,这些ips技术和地标本身缺乏准确性和精确度。例如,基于射频的解决方案在室内环境中存在多路径效应和阴影,导致精度和稳定性较差[a.boseandc.h.foh,“apracticalpathlossmodelforindoorwifipositioningenhancement,”inproc.6thint.conf.inf.,commun.signalprocess.,dec.2007,pp.1
–
5],[s.schmitt,s.adler,andm.kyas,“theeffectsofhumanbodyshadowinginrf-basedindoorlocalization,”inproc.int.conf.indoorpositioningindoornavigat.,oct.2014,pp.307
–
313]。此外,由于存在严重的电磁干扰和健康问题,这些系统不适合部署在敏感环境中。同时,基于wifi、地磁和地标的解决方案对不断变化的室内环境非常敏感,因此需要定期进行现场勘测,进行指纹和地标更新,以保持可接受的精度。因此,当pdr结合这些ips技术后,步长、航向角的估计误差以及行人和设备的差异所导致的根本问题仍然无法解决。
技术实现要素:
[0005]
本发明的目标是提供一种可见光通信(visiblelightcommunication,vlc)辅助惯性导航系统,其也可称为光辅助行位推算(light-assisteddearreckoning,lidr)系统。它使用智能照明设备作为高精度的位置地标,以为pdr提供校准,并同时可辅助估计行人的步长,以提高pdr的定位精度。此外,本发明更引入一种基于光形的航向角修正算法,可以降低航向角误差,进一步提高精度。同时,也通过构建一个基于智能手机的的应用程序来集成lidr和数字地图界面,以应用lidr的定位结果于所显示的对应室内空间的数字
地图。
[0006]
更具体来说,本发明提供一种使用可见光通信定位以及行人航位推算的方法、系统 及电子设备,以利用从所撷取的影像中所识别的智能照明设备的标识符以及光源影像来进行 可见光定位,以获得高精度的可见光定位位置且校正航向角,从而进一步提高pdr的定位 精度并且获得高精度的用户/设备坐标,从而解决当前技术水平下的前述缺点。
[0007]
根据本发明的第一方面,提供了一种使用可见光通信定位以及行人航位推算的计算 器实现的方法,其用于定位电子设备及持有所述电子设备的用户的位置。所述方法包括:经 由所述电子设备的相机,持续地撷取影像;经由所述电子设备的处理器,判断所述影像中是 否包含具有可见光通信数据的光源影像;若所述影像中包含具有所述可见光通信数据的所述 光源影像,经由所述处理器,从所述可见光通信数据识别对应智能照明设备的标识符,并且 识别所述光源影像的光源形状;持续地从所述电子设备的陀螺仪接收方位角数据;持续地从 所述电子设备的磁力计接收磁方位角数据;持续地从所述电子设备的加速度计接收加速度数 据;经由服务器应用程序接口(api),从服务器接收数字地图数据;经由所述处理器,根据 所述方位角数据、所述磁方位角数据及所述数字地图数据来计算所述电子设备的设备航向 角;经由所述处理器,根据所述加速度数据来计算持有所述电子设备的用户的步伐频率;经 由所述处理器,根据所述标识符、所述数字地图数据以及所述光源形状来计算且更新所述电 子设备的可见光定位位置,其中所述可见光定位位置被判定为所述用户的位置;经由所述处 理器,根据所述标识符、所述数字地图数据、所述光源影像以及所述设备航向角来校正所述 设备航向角;经由所述处理器,根据所述步伐频率以及所述可见光定位位置来计算所述用户 的步伐长度;经由所述处理器,根据所述可见光定位位置、所校正的设备航向角以及所述步 伐长度来计算且更新所述用户的当前坐标。
[0008]
根据本发明的第二方面,提供了一种用于定位电子设备及持有所述电子设备的用户 的位置的定位系统,所述系统包括多个处理器,其用以执行机器指令来实现上述所说明的方 法。
[0009]
根据本发明的第三方面,提供了一种用于定位电子设备及持有所述电子设备的用户 的位置的电子设备,所述电子设备包括处理器,其用以执行机器指令来实现上述所说明的方 法。
附图说明
[0010]
图1a及1b示出了根据本发明的一个实施例的使用可见光通信定位以及行人航位推 算的定位系统的示意图。
[0011]
图2a示出了所述定位系统的电子设备的框图。
[0012]
图2b示出了所述电子设备所执行的定位应用程序的架构图。
[0013]
图2c示出了所述定位系统的智能照明设备的框图。
[0014]
图2d示出了所述定位系统的服务器的框图。
[0015]
图3示出了所提供的定位方法的流程图。
[0016]
图4a示出了图3中的步骤s350的流程图。
[0017]
图4b及4c示出了可见光定位操作的示意图。
[0018]
图5a示出了图3中的步骤s360的流程图。
[0019]
图5b、5c及5d示出了航向角校正操作的示意图。
[0020]
图6a示出了图3中的步骤s331的流程图。
[0021]
图6b示出了步伐检测的示意图。
[0022]
图6c示出了图3中的步骤s370的流程图。
[0023]
图7a示出了图3中的步骤s380的流程图。
[0024]
图7b示出了可见光定位操作及经由所述可见光定位操作所辅助的行人航位推算的示 意图。
[0025]
图7c示出了经由所述可见光定位操作所辅助的行人航位推算的示意图。
具体实施方式
[0026]
在以下描述中,用于使用可见光通信定位以及行人航位推算的定位方法、系统及电 子设备等作为优选示例进行阐述。对本领域技术人员显而易见的是,在不背离本发明的范围 和精神的情况下,可以进行修改,包括添加和/或替换。为了不混淆本发明,具体细节可以 省略;然而,编写本公开内容是为了使本领域技术人员能够在没有过度实验的情况下实践本 文的教导。本文所定义的一般原理可应用于其它实施例。因此,本发明并不意图限于所展示 和描述的特定实施例,而是应被赋予与本文中公开的原理和新颖特征一致的最广范围。
[0027]
请参照图1a及1b。根据本发明的各种实施例,提供了一种定位系统1。所述定位系 统包括电子设备100(如,智能手机、智能平板、智能手表、智能眼镜等可携带电子设备)、 智能照明设备200(也可简称为,光源)以及服务器300。所述电子设备100、智能照明设备 200以及服务器300各自可具有处理器,以执行相应的应用程序来实现本发明所提供的定位 方法。所述电子设备100与所述服务器300之间可藉由无线网络联机nc来传输控制数据 cd。所述控制数据cd包括服务器300传输至电子设备100的数字地图数据(digital mapdata)。所述服务器300可相应于所述电子设备100所发送的全球定位系统数据来提供相应的 所述数字地图数据给所述电子设备100。所述智能照明设备200可发射出具有可见光通信 vlc特性的光,以使所发出的光可用来传输可见光通信数据ld。所述智能照明设备200所 发出的光是具有高精度到达角(aoa)的可见光定位(vlp)信号。
[0028]
所述电子设备100的相机140可持续地撷取到位于相机140的视野fov内的影像。 当持有所述电子设备100的用户u1经过所述智能照明设备200且所述智能照明设备200位 于视野fov内时,所撷取的影像会包含所述智能照明设备200的影像(也称为光源影像)。此 时,所述相机140所撷取的光源影像具有对应于所述智能照明设备200的可见光通信数据 ld。所述可见光通信数据ld包括所述智能照明设备200的标识符(如,数字地图光源编号 或独特标识符)。
[0029]
所述定位系统1以及所述电子设备100可利用所述可见光通信数据ld的标识符来配 合所接收的所述数字地图数据,以取得所述智能照明设备200的位置/坐标。此外,所述电子 设备100更可利用所述光源影像的形变来推算出所述电子设备100与所述智能照明设备200 之间的相对位置,从而计算出所述电子设备100的当前位置/坐标。另一方面,所述电子设备 100也可利用所述光源影像以及所述数字地图数据来计算出所述用户u1移动时的方位角(也 可称为航向角)。
[0030]
根据本发明的各种实施例,图2a提供了一种电子设备100,其包括处理器110、数 据通信电路120、非暂态存储电路130、相机140、多个传感器150以及输入/输出电路单元 160。所述输入/输出电路单元160例如是屏幕或触控屏幕。所述多个传感器150包括陀螺仪 151、磁力计152以及加速度计153。所述多个传感器150更可包括全球定位系统电路模块 (未示出),以接收全球定位系统数据。
[0031]
非暂态存储电路130被配置用来存储程序(如,机器指令)131以及数据库132。所述 程序131包括所述电子设备100的固件以及执行于所述电子设备100的软件/应用程序。所述 数据库132用以存储数据,其中可包括一或多个数字地图数据、服务器信息、用户信息、电 子设备信息以及定位信息。
[0032]
所述数据通信电路120被配置用以建立无线网络联机nc以传输数据。所述相机140 被配置用以撷取/拍摄影像img。所述影像img可被分析以识别出所撷取的影像img所包含 的可见光通信数据ld。
[0033]
所述处理器110行应用程序/机器指令131以按照本实施例来实现所提供的方法。
[0034]
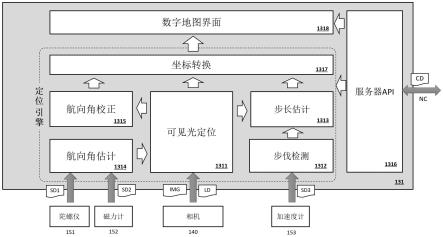
请参照图2b,所述应用程序/机器指令131包含多个程序模块。所述多个程序模块包 括可见光定位模块1311、步伐检测模块1312、步长估计模块1313、航向角估计模块1314、 航向角校正模块1315、服务器api 1316、坐标转换1317以及数字地图接口模块1318。在以 下的叙述中,每个程序模块的运作也可视为处理器110的运作。
[0035]
所述可见光定位模块1311用以根据从所述相机140所接收的影像数据img以及可见 光通信数据ld来执行可见光定位操作,以获得可见光定位位置/坐标。
[0036]
所述步伐检测模块1312用以根据从所述加速度计153所接收的加速度数据sd3来执 行步伐检测操作,以获得步伐数目以及步伐频率。
[0037]
所述步长估计模块1313用以根据所述步伐频率来执行步长估计,以估计所述用户步 行时的步长。
[0038]
所述航向角估计模块1314用以根据从陀螺仪151所接收的方位角数据sd1以及从所 述磁力计152所接收的磁方位角数据sd2来执行航向角估计操作,以获得所述电子设备的设 备航向角。
[0039]
所述航向角校正模块1315用以根据所述设备航向角以及对应所感测到的智能照明设 备200的安装方向角来执行航向角校正操作,以校正所述设备航向角。所校正的设备航向角 被判定为所述用户的航向角。
[0040]
所述服务器应用程序接口(api)模块1316用以与服务器300建立网络联机,以藉由所 述网络联机来与服务器300传输数据(如,控制数据cd)。
[0041]
所述坐标转换模块1317用以根据所校正的航向角、所获得的用户步长以及可见光定 位位置来执行坐标转换操作,以获得所述用户的当前坐标。所述当前坐标也可透过所述服务 器api模块1316被发送至所述服务器300,从而使服务器300可藉此执行相应的管理。
[0042]
所述数字地图接口模块1318用以根据所述用户的所述当前坐标来绘制对应所述用户 的图标于所显示的数字地图内。
[0043]
请参照图2c,智能照明设备200包括处理器210以及光通信电路240。所述光通信 电路240用以接收所述处理器210的指示来发出特定频率/明暗/颜色的光,以广播/传输相应 的可见光通信数据ld。所述光通信电路240例如是可程序化/可客制化的光二极管(led)
设 备。所述处理器210可被微控制器(mcu)所替代。
[0044]
在一特殊实施例中,智能照明设备200仅包括光通信电路240,并且光通信电路240 被预先设定以发出预设的光,从而广播/传输预设的可见光通信数据ld。
[0045]
在另一实施例中,智能照明设备200更可包括数据通信电路220、非暂态存储电路 230。非暂态存储电路230用以存储用于可见光通信操作的数据。数据通信电路220可藉由 无线或有线的方式与一或多个电子设备或服务器来建立网络联机,以传输数据。
[0046]
请参照图2d,服务器300包括处理器310、数据通信电路320以及非暂态存储电路 330。非暂态存储电路330被配置用来存储程序(如,机器指令)331以及数据库332。所述程 序331包括所述服务器300的固件以及执行于所述服务器300的软件/应用程序。所述数据库 332用以存储数据,其包括一或多个数字地图数据、服务器信息、用户信息、电子设备信息 以及定位信息(如,对应不同用户/电子设备的坐标信息)。所存储的数据可不断被更新,以便 于以后在用户和设备之间访问和共享。所述数据通信电路320被配置用以建立无线网络联机 nc以传输数据。所述处理器310用以管理服务器300的整体运作。
[0047]
请参照图3,在步骤s300中,所述相机140持续地撷取/拍摄影像。在一实施例中, 所述处理器110可在判定所述电子设备100被用户u1以预定姿势所持握时,开始执行步骤 s300。例如,当所述电子设备被所述预定姿势所持握时,所述相机的视野fov有可能撷取到 含有智能照明设备200的影像。对应所述影像的影像数据img会被传输至处理器110。所述 预定姿势例如是用户在手持电子设备100并且看着屏幕时(屏幕朝上)。
[0048]
接着,在步骤s310中,所述处理器110判断所述影像中是否包含具有可见光通信数 据ld的光源影像。具体来说,所述处理器110会查找所接收的影像数据img,以判断在所 述影像中,是否具有特定态样的光源影像,所述特定态样的光源影像可被解析出对应的可见 光通信数据ld。
[0049]
若判定所述影像中包含具有可见光通信数据ld的光源影像(如,图4b中的影像img 中的光源影像limg),所述处理器110从所述可见光通信数据ld识别对应智能照明设备200 的标识符(s311),并且识别所述光源影像limg的光源形状(s312)。对应所述可见光通信数 据ld的智能照明设备200也可称为目标智能照明设备200。
[0050]
此外,经由步骤s320,所述处理器110持续地从所述电子设备的陀螺仪接收方位角 数据;经由步骤s321,所述处理器110持续地从所述电子设备的磁力计接收磁方位角数据; 经由步骤s330,所述处理器110持续地从所述电子设备100的加速度计接收加速度数据;以 及经由步骤s340,所述处理器110透过服务器应用程序接口,从服务器300接收数字地图数 据。
[0051]
在步骤s322中,所述处理器110根据所述方位角数据、所述磁方位角数据及所述数 字地图数据来计算所述电子设备100的设备航向角。
[0052]
在步骤s331中,所述处理器110根据所述加速度数据来计算持有所述电子设备100 的用户的步伐频率。
[0053]
在步骤s350中,所述处理器110根据所述标识符、所述数字地图数据以及所述光源 形状来计算且更新所述电子设备100的可见光定位位置。所述可见光定位位置可为经纬度坐 标或相应于所述数字地图数据的地图坐标。所述可见光定位位置被判定为所述用户u1的位 置。
[0054]
接着,在步骤s360中,所述处理器110,根据所述标识符、所述数字地图数据、所 述光源影像以及所述设备航向角来校正所述设备航向角,其中所校正的设备航向角被判定为 所述用户u1的航向角。
[0055]
接着,在步骤s370中,所述处理器110,根据所述步伐频率以及所述可见光定位位 置来计算所述用户u1的步伐长度。
[0056]
接着,在步骤s380中,所述处理器110,根据所述可见光定位位置、所校正的设备 航向角以及所述步伐长度来计算且更新所述用户u1的当前坐标。
[0057]
以下关于可见光定位操作的说明,请参照图4a至图4c。在步骤s351中,所述处理 器110(执行可见光定位模块1311)根据所述数字地图数据以及所述标识符来识别对应所述智 能照明设备200的光源配置参数,其中所述光源配置参数包括预设光源位置、预设光源形状 以及预设光源尺寸。换句话说,所述数字地图数据具有相应的地图内的多个智能照明设备 200各自的光源配置参数。
[0058]
接着,在步骤s352中,所述处理器110根据所述预设光源形状、所述预设光源尺寸 以及所述光源形状来执行投影计算,以计算出所述电子设备100与所述智能照明设备200之 间的相对位置。最后,在步骤s353中,所述处理器110根据所述预设光源位置以及所述相 对位置来计算所述电子设备100的所述可见光定位位置。
[0059]
更详细来说,光学相机通信(optical camera communication,occ)可以实现非常高精 度的vlp。通过occ检测到对应光源200的标识符后,可以通过基于相机投影几何的到达 角(angle of arrival,aoa)来计算电子设备100和光源200之间的相对位置,如图4b及4c 所示。相机投影可利用下方的公式(1)来表示。
[0060]
pc=c[r|t]pwꢀꢀꢀ
(1)
[0061]
公式(1)中,pc为一个点于影像内的坐标;此点的真实世界坐标为pw;c为经由对相 机标定所得到的相机内矩阵(camera intrinsic matrix);r、t分别为电子设备100的旋转矩阵及 编译矩阵。r由陀螺仪计算。t决定了智能手机相应于pw点的真实世界位置。公式(1)可进一 步表示为下方的公式(2)。
[0062][0063]
其中,s为影像点的同质坐标(homogenous coordinates)的比例因子(scaling factor)。对 于可见光定位操作,光源200的中心的实际位置是已知的(可从对应光源200的光源配置参数 中获得。如,预设光源位置)。因此,若确定了所投影的光源影像的中心坐标(u,v),可进一 步对t求导出公式(2)的解,从而得到电子设备100相对于光源200的中心的相对位置,以获 得电子设备100的实际位置([x,y,z]
camera
)(即,可见光定位位置)。
[0064]
以下关于航向角校正操作的说明,请参照图5a至图5d。航向角校正操作利用光源 200的几何形状进行航向角校准。由于商业和工业场所使用的光源形状大多为矩形,可以利 用光的形状来精确估计用户在光源下通过时的行进方向。此外,由于用户的具体位置可利用 vlp来处理,因此在算法中进一步加入航向角校正,所附加的计算成本相对较低。该算法依 赖于光源200的几何形状和安装方向信息,这些信息(如,预设光源形状、预设光源尺寸以及 预设光源安装方位角)可以存储数字地图数据中。
[0065]
在步骤s361中,所述处理器110(执行航向角校正模块1315)根据所述数字地图数据 以及所述标识符来识别对应所述智能照明设备200的光源配置参数,其中所述光源配置参数 包括预设光源形状、预设光源尺寸以及预设光源安装方位角。
[0066]
接着,在步骤s362中,所述处理器110根据预设光源形状、预设光源尺寸以及所述 光源影像识别所述光源影像中的多个光源参考点。
[0067]
接着,在步骤s363中,所述处理器110根据所述预设光源安装方位角以及所述设备 航向角来计算分别对应所述多个光源参考点的多个参考点方位角。
[0068]
接着,在步骤s364中,所述处理器110根据所述多个参考点方位角以及所述设备航 向角来计算且更新所述设备航向角,其中所更新的设备航向角被设定为所述用户的当前航向 角。
[0069]
更详细来说,如图5b所示,光源的宽度(w)和长度(l)决定了矩形的形状,而θ
l
指示 了沿矩形长边的安装方位角。值得注意的是,方形灯面板和管灯都是矩形形状的特殊情况, 分别为w=l和w《《l的特殊情况。由于无法确定被检测的光源影像的角点(corner)的排列 顺序,因此所提供的算法仅用于将航向角(heading angle)修正为最接近角点的真实方向。
[0070]
基于预设光源安装方位角θ
l
,可以求出从光源中心到每个角点(c1至c4)的方向,如 图5c所示。如果将光源200的第i个角点的方向角记为θ
ic
,则一个矩形光源的四个角点的 方位角可藉由下方公式(3)来计算。
[0071][0072]
正方形光源的四个角点的方位角可藉由简化的公式(4)来计算,其中w=l。
[0073][0074]
管状光源的四个角点的方位角可藉由简化的公式(5)来计算,其中w《《l。
[0075][0076]
在vlp的影像处理过程中,光源形状和角点信息是已知的,如图5d内的第二图所 示。本实施例所提供航向角校正操作可以经由找到每个角点的估计方位角,并藉由导出估计 方位角与设备航向角之间的最小差异来实现航向角校正操作。
[0077]
更详细来说,先求出电子设备100的正y轴与每个角点之间的夹角,记为ci。将其 与设备航向角相加,以得到每个角点的估计方位角如下方公式(6)所示。
[0078][0079]
其中,a,b,c,d表示在光源影像中的投影的角点所对应的现实世界中的角。然而,
影 像中的角点与现实世界的角点之间的对应顺序是未知的,但可以通过最小化差值来找到,如 下方的公式(7)所示。
[0080][0081]
因此,可以进一步找到可以添加到设备航向角的校正偏移,以校正设备航向角,如 下方公式(8)所示。
[0082][0083]
请参照图5d,假设所撷取的影像img含有光源影像limg(如第一个图所示)。经由 步骤s362,如第二图所示,可根据预设光源形状、预设光源尺寸以及所述光源影像识别所 述光源影像中的多个角点(光源参考点)c1、c2、c3、c4、光源200的中心点ct1,并且可识 别光源影像limg中的预设光源安装方位角θ
l
。
[0084]
经由步骤s363,如第三图所示,根据所述预设光源安装方位角以及所述设备航向角 来计算分别对应所述多个光源参考点的多个参考点方位角(如,透过公式 (3)、(6))。
[0085]
经由步骤s364,如第四图所示,根据所述多个参考点方位角以及所述设备航向角来 计算出校正偏移(如,透过公式(7)、(8)),并且经由加入所述校正偏移至所述设备航向角来更 新/校正所述设备航向角,以得到最终的已校正设备航向角(θ
′
compass
)。
[0086]
以下关于计算所述步伐频率的说明,请参照图6a至图6b。在步骤s3311中,处理 器110(执行步伐检测模块1312)根据所述加速度数据来识别多个加速度峰值以及对应所述多 个加速度峰值的多个峰值时间。接着,在步骤s3312中,根据所述多个加速度峰值以及所述 多个峰值时间来计算平均步伐频率以作为所述用户的所述步伐频率。
[0087]
更详细来说,本实施例是利用加速度数据中的垂直加速度来检测用户u1的步伐。如 图6b所示,由于在这种情况下,电子设备100可能会以稍微倾斜的角度手持,因此需要考 虑电子设备100的俯仰角度,才能有效地从加速度的y轴和z轴中提取垂直加速度分量。可 利用下方公式(9)来求出电子设备100的3d加速度。
[0088]
accw=r
x,y,z
*acc
x,y,z
ꢀꢀꢀ
(9)
[0089]
其中,r
x,y,z
是电子设备100对应至到世界参考系(world reference frame)的3d旋转矩 阵,acc
x,y,z
是对应至电子设备100的参考系的3d加速度。
[0090]
垂直加速度分量accv可经由下方公式(10)来提取。
[0091][0092]
但是,若只考虑电子设备100围绕x轴的倾斜角度,即俯仰角,公式(10)可以简化为 公式(11)及(12)。
[0093]
[0094][0095]
接着,垂直加速度分量accv可经由下方公式(13)来计算。
[0096]
accv=accysinθ
x
+acczcosθ
x
ꢀꢀꢀ
(13)
[0097]
然而,由于行人步行模式的差异,加速度数据可能同时存在噪声。为了抑制噪声, 必须对加速度数据进行低通滤波,将截止频率设定为2.5hz(假设这是行人在正常情况下的最 大步行步速)。所采用的滤波器是一个基于移动平均的衰减器,输出表达式如下方公式(14):
[0098][0099]
其中,衰减因子α可利用下方公式计算。
[0100]
α
t
=(τ
t-τ
t-1
)/[t+(τ
t-τ
t-1
)]
ꢀꢀꢀ
(15)
[0101]
其中τ
t
和τ
(t-1)
分别表示t和t-1时刻的系统时钟,t为滤波器的时间常数。滤波后的垂 直加速度波形如图6b所示。
[0102]
步伐检测算法是通过跟踪已滤波的垂直加速度的正/负峰值来实现的,以下简称峰值 和谷值。为了确保峰值和谷值属于一个有效步伐,必须要确保峰值(加速度峰值)和谷值(加速 度谷值)之间的差异大于一个阈值,并且最后步伐与当前步伐的时间差不大于最大步伐频率 (wf
max
)的周期。步伐条件可藉由公式(16)表示。
[0103][0104]
其中,t
kstep
为第k个步伐的时间;∈
step
为峰谷阈值;和分别表示峰加速 度和谷加速度。并且峰时间(对应峰值的时间点)与谷时间(对应谷值的时间点)分别根据下方 公式(17)、(18)定义。
[0105]
t
peak
={t|a
t
》a
t+1
,a
t
》a
t-i
,1≤i≤n
p
}
ꢀꢀꢀꢀ
(17)
[0106]
t
valley
={t|a
t
《a
t+1
,a
t
《a
t-i
,1≤i≤nv}
ꢀꢀꢀꢀ
(18)
[0107]
其中,n
p
=2,并且nv=1。换句话说,利用公式(16)至(18),可以经由确定多个峰 值、多个谷值、相应的多个峰时间和谷时间来判定每个步伐的时间t
kstep
。
[0108]
在判定出每个步伐的时间点t
kstep
后,所述步伐频率可根据下方的公式(19)计算。
[0109][0110]
其中,n=5,即,只考虑最近的5个步伐,以不断适应用户最近的步行速度的变 化。但本发明不限于此,在其他实施例中,n可被设定为大于5或小于5的正整数。
[0111]
为了解决不同的电子设备所获得的加速度数据的差异性,可变步伐检测阈值∈
step
可利 用下方公式(20)来计算。
[0112][0113]
举例来说,请参照图6b,假设经过上述的算法(n),对于最近所获得的已滤波加速 度数据,处理器110确定了相应于多个步伐点pk1~pk7的步伐时间t
pk1
~t
pk7
。接着,处理 器110可对应地计算出每个步伐之间的时间差δt
s1
~δt
s6
。在n设定为5的情况下,处理器110 取时间差δt
s3
~δt
s6
来计算出步伐频率,即wf=5/(δt
s3
+δt
s4
+δt
s5
+δt
s6
)。
[0114]
以下关于计算所述步伐长度的说明,请参照图6c以及图7b。在步骤s371中,处理 器110(执行步长估计模块1313)根据所述可见光定位位置的变化与时间差来计算对应的移动 速度。接着,在步骤s372中,处理器110根据所述移动速度以及所述步伐频率来计算所述 用户的所述步伐长度。
[0115]
更详细来说,假设在时间点t,所追踪/计算出的可见光定位(vlp)位置以下方公式 (21)来表示。
[0116][0117]
利用最近连续vlp位置的变化来计算移动距离,配合相应的时间差,可以计算出用 户u1的移动速度ws
t
,如下方公式(22)所示。
[0118]
其中,δt
vla
是vlp位置输出速率,是最后一个计算出的vlp位置。
[0119]
计算出移动速度后,步伐长度可藉由下方公式(23)来计算。
[0120][0121]
举例来说,如图7b所示,利用在第二期间的vlp覆盖区域中的第一个vlp位置 loc1与最后一个vlp位置loc2,处理器110可以配合相应的时间差(t2-t1)来计算出对应的 移动速度。同时,在这段期间内的所判定出的步伐pk1~pk4也可被用来计算出步伐频率。 最终,可利用对应第二期间所计算出的所述移动速度与所述步伐频率来计算出步伐长度。所 述步伐长度可用于之后的第三期间(即,没有vlp覆盖的区域)来配合对应第二期间所计算出 的用户u1的已校正航向角来计算pdr位置。
[0122]
应注意的是,行人的移动速度和步伐长度可能会在他们走出vlp覆盖区域(对应图 7b的第二期间)之后变化。因此,可以利用weingberg的基于加速度幅值的步伐长度估计方 程式从上述的公式(23)中提取主体相关常数(subject-dependent constant)k。weingberg的步伐 长度估计方程式如下方公式(24)所示。
[0123][0124]
而主体相关常数可利用下方公式(25)来计算。
[0125]
[0126]
对于10米以内的距离,经由上述算法的距离测量精度可小于1米。即,如果每10米有一个智能照明设备200可用,整体的pdr的精确度可以小于1米。
[0127]
以下关于步骤s380以及本发明的定位方法的整体应用的说明,请参照图7a至图7c。在步骤s381中,处理器110(执行坐标转换模块1317)判断当前所撷取的影像中是否包含具有可见光通信数据的光源影像。
[0128]
若当前所撷取的影像中不包含具有所述可见光通信数据的所述光源影像,处理器110判定现在无法进行vlp操作,并且会利用最后计算出的可见光定位位置、已校正的设备航向角、所感测到的步伐数目以及所计算的步伐长度来推估用户u1的当前位置(即,执行步骤s382~s384)。
[0129]
在步骤s382中,处理器110将最后计算出的可见光定位位置设定为移动路径的起点。接着,在步骤s383中,处理器110根据所校正的设备航向角、步伐数目以及所述步伐长度来计算所述用户从所述起点出发的所述移动路径,并且判定所述移动路径的终点为所述用户的当前位置。最后,在步骤s384中,处理器110根据所述起点的起点坐标值以及所述移动路径计算所述终点的终点坐标值,以将所述终点坐标值设定为所述用户的所述当前坐标。
[0130]
若当前所撷取的影像中包含具有所述可见光通信数据的所述光源影像,处理器110判定现在可进行vlp操作,并且利用所述可见光通信数据以及所述光源影像来计算出可见光定位位置以作为用户u1的当前位置(即,执行步骤s385)。在步骤s385中,处理器110将对应所述可见光通信数据的所计算的可见光定位位置的坐标值设定为所述用户的所述当前坐标。
[0131]
请参照图7b,举例来说,假设在第一期间以及第三期间内,用户u1所处的位置不能撷取到包含智能照明设备200的影像(即,处于vlp未覆盖区域);假设在第二期间内,用户u1所处的位置可以撷取到包含智能照明设备200的影像(即,处于vlp覆盖区域)。此外,在第一期间之前,处理器110并未获得任何vlp位置的信息。
[0132]
在这个例子中,当用户u1处于vlp覆盖区域(第二期间),电子设备100的处理器110可以对应持续地所撷取到的对应光源200的光源影像及可见光通信数据来持续地计算出用户u1的位置。同时,也可校正相应的设备航向角,并且计算出用户u1的步伐长度。例如,处理器110根据可见光定位位置loc1、loc2之间的距离δd,以及对应可见光定位位置loc1、loc2的时间点t1、t2的时间差δtv来计算出移动速度。此外,根据对应所感测到的步伐pk1~pk4的步伐频率,处理器110可进一步计算出步伐长度。
[0133]
接着,当用户u1从vlp覆盖区域进入至vlp未覆盖区域(第三期间)。在vlp覆盖区域内的最后所计算出的可见光定位位置的坐标值被设定的所述移动路径的起点的坐标值(终点坐标值)。处理器110判定无法执行可见光定位操作,并且利用最后所计算出的设备航向角作为用户u1的航向角及最后所计算的步伐长度估算移动路径。例如,接续图7b的例子,如图7c所示,用户u1在vlp未覆盖区域,处理器110可根据已校正设备航向角θ
′
compass
以及每个感测到的步伐pk5~pk12来配合已计算的步伐长度来推估移动路径。最后的步伐pk12会对应至移动路径的终点loc3,并且此终点的坐标(终点坐标值)被判定为用户u1的当前坐标。
[0134]
值得一提的是,在现实场景中,由于电子设备100的相机140的视野fov有一定的
理器或可编程逻辑装置中运行的机器指令或固件/软件代码可由软件或电子技术领域的从业 人员基于本公开的教示容易地制作。
[0145]
根据实施例的方法的全部或部分可在包含服务器计算机、个人计算机、膝上型计算 机、移动计算装置(例如智能电话)和平板计算机在内的一个或多个计算装置中执行。
[0146]
实施例包含具有存储在其中的机器指令或固件/软件代码的非暂态存储器电路和/或计 算机存储介质,所述机器指令或固件/软件代码可用于对处理器进行编程以执行本发明的过 程中的任一个。非暂态存储器电路和/或存储介质包含(但不限于)软盘、光盘、蓝光光 盘、dvd、cd-rom和磁光盘、rom、ram、快闪存储器装置,或适于存储指令、代码和 /或数据的任何类型的介质或装置。
[0147]
根据各种实施例的功能单元中的每一个还可实施于分布式计算环境和/或云计算环境 中,其中由通过例如内联网、广域网(wan)、局域网(lan)、因特网和其它形式的数据 传输介质等通信网络互连的一个或多个处理装置以分布方式执行机器指令的全部或部分。各 种实施例中数据通信电路建立的通信网络支持各种通信协议,例如(但不限于)wi-fi、全 球移动通信系统(gsm)系统、个人手持电话系统(phs)、码分多址(cdma)系统、全 球微波接入互操作性(wimax)系统、第三代无线通信技术(3g)、第四代无线通信技术(4g)、第五代无线通信技术(5g)、长期演进技术(lte)、蓝牙(bluetooth)和超宽带 (uwb)。
[0148]
出于说明和描述的目的,已经提供本发明的前述描述。其不希望是详尽的或将本发 明限于所公开的精确形式。许多修改及变化对于所属领域的从业人员来说将是显而易见的。
[0149]
挑选和描述实施例是为了最佳地阐释本发明的原理和其实际应用,借此使所属领域 的其他技术人员能够理解本发明的各种实施例和适合于审慎考虑的特定用途的各种修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1