基于高精地图的路口交通场景下雷达原点信息修正方法与流程
1.本发明涉及雷达在交通场景的应用领域,尤其涉及基于高精地图的路口交通场景下雷达原点信息修正方法。
背景技术:
2.如今,很多城市的路口安装了毫米波雷达终端设备,从而能够获取路口实时车辆行驶轨迹。有学者研究雷达坐标系与大地坐标系之间转换关系,计算转换误差,也有学者研究在路段场景的雷达坐标系下,根据目标车辆当前坐标位置预测接下来位置与实际位置偏差,进而校准雷达设备的原点信息,但基于高精地图的路口交通场景下的雷达原点信息修正未给出具体的解决方案,准确稳定并自动修复路口交通场景下雷达原点信息,不仅使得路口目标车辆轨迹与高精地图定位高精度匹配,也为车辆平行仿真及数字化道路提供基础。
3.因此本文利用雷达坐标系的轨迹数据,识别关键点位,并与大地坐标系的高精地图中对应关键点位比对,得出雷达原点移动位置及旋转角度,提高雷达原点位置识别的准确性和稳定性。
技术实现要素:
4.本发明主要解决现有的技术中在路口中雷达原点位置识别的准确性差的问题;提供基于高精地图的路口交通场景下雷达原点信息修正方法,得到准确的雷达原点信息。
5.本发明的上述技术问题主要是通过下述技术方案得以解决的:基于高精地图的路口交通场景下雷达原点信息修正方法,包括以下步骤:
6.获取雷达原点信息以及所在路口信息;
7.筛选停止点,建立停止点集s;根据停止点集s确定进口停止线;
8.基于进口停止线提取进入路口的轨迹数据;
9.根据轨迹数据进行聚类提取找到最内侧车道的中心线;
10.进行雷达坐标转换;
11.进行雷达航向角调整;
12.进行雷达原点位置调整;
13.经过迭代优化后进行修正结果的准确性评估。
14.作为优选,筛选停止点的方法为:获取雷达检测到的轨迹点位数据,记为数据集q,筛选q中同一目标id的连续两个轨迹点未变化的样本数据,视该样本为停止点,记筛选出的停止点集为s。
15.作为优选,进口停止线的确定方法为:从停止点集s中x坐标最小的轨迹点开始,逐个判断其两米范围内的停止点个数是否大于num,直至找到满足条件的停止点,然后在此停止点的不同y坐标范围内按照上述规则寻找非重复的另一个停止点,若停止点集s中没有满足条件的点,则增加q中的数据量继续寻找,直至找到满足条件的同一x坐标下的两个停止
点,根据两个停止点生成停止线,其x坐标即为停止线的位置,记为x
stop
。
16.作为优选,进入路口的轨迹数据的提取方法为:从q中筛选出x坐标大于x
stop
的数据,根据轨迹x坐标的变化趋势区分轨迹的方向,如果x坐标按照时间排序递增,则为驶出路口轨迹样本;如果x坐标按照时间排序递减,则为进入路口轨迹样本,筛选出进入路口的轨迹数据,记为r。
17.作为优选,最内侧车道的中心线提取方法为:从r中提取y坐标最小的前1/4的样本数据,根据x坐标每隔m米划分为一个区域z,对每个区域的数据集进行聚类,经过聚类迭代收敛后得到各区域的聚类中心,对于每个区域z,若聚类个数为1,则该数据簇的中心点即代表该区域中最内侧车道的中心点;若聚类个数大于1个,则聚类中心点中y坐标值最小的点即代表该区域中最内侧车道的中心点;记各区域最内侧车道中心点的集合为{(cx1,cy1),(cx2,cy2)...(cxn,cyn)},相邻两点间形成一条线,共组合成n-1条中心线,即为线集l。
18.作为优选,进行雷达坐标转换的方法为:设雷达的初始经纬度为(lon,lat),航向角为α;在高精地图上提取进口区域最内侧车道的中心线的两个端点p1、p2,以及最内侧车道中心线与停止线的交点o(lon1,lat1),按照大地坐标系转雷达坐标系的方法将p1、p2、o的经纬度坐标转换为雷达坐标系下的坐标。
19.作为优选,雷达航向角调整方法为:通过余弦定理计算l中每条线的端点n1、n2与p1、p2的夹角η,可得到n-1个夹角的均值为更新雷达的航向角:作为优选,雷达原点位置调整的方法为:通过高精地图提取道路中心线与车道停止线的交点o(lono,lato),计算雷达坐标系下的停止线与内测车道中心线的交点,记为o
′
(xo′
,yo′
),其中xo′
=x
stop
,按照雷达坐标系转大地坐标系的方法将交点o
′
(xo′
,yo′
)的雷达坐标转换为经纬度坐标,记为o
′
(lono′
,lato′
),更新雷达原点的经纬度:
20.lon=lon+(lono′-lono)
21.lat=lat+(lato′-lato)。
22.作为优选,修正结果的准确性评估的方法为:选取同时被多个雷达识别到的车辆轨迹,计算在同一时刻不同雷达识别出的距离误差,如果距离误差小于一个车身距离,则说明修正后的雷达信息准确,否则不准确。
23.本发明的有益效果是:通过自动修复路口交通场景下雷达原点信息,不仅使得路口目标车辆轨迹与高精地图定位高精度匹配,也为车辆平行仿真及数字化道路提供基础。
附图说明
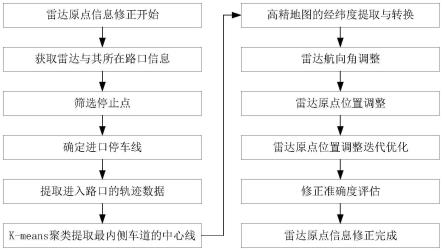
24.图1是本发明的雷达原点信息修正方法的流程图。
25.图2是本发明的雷达在路口的照射示意图。
26.图3是本发明的目标进口数据分布示例图。
27.图4是本发明的雷达原点修正前轨迹。
28.图5是本发明的雷达原点修正后轨迹。
具体实施方式
29.为了使本发明的目的、技术方案及优点更加清楚明白,通过下述实施例并结合附图,对本发明实施例中的技术方案的进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定发明。
30.实施例:基于高精地图的路口交通场景下雷达原点信息修正方法,如图1所示,包括以下步骤:
31.s1:获取雷达原点信息以及所在路口信息;以a市一雷达所在路口为例,雷达照射范围及雷达坐标系建立规则如图2所示;获取雷达所在路口周边70米范围内10分钟的雷达目标轨迹点位数据,样例信息如表1所示,目标进口停止线、划分区域车道、车道中心点以及数据集q在坐标系的分布如图3所示。
32.s2:筛选停止点,建立停止点集s;筛选q中同一目标id的连续两个轨迹点未变化的样本数据,视该样本为停车点,记筛选出的停车点集为s,清洗s中轨迹点个数较少5的目标样本;清洗后的停车点集s分布情况如图3中的粗点所示。
33.s3:根据停止点集s确定进口停止线;从停车点集s中x坐标最小的轨迹点x
min
(71.35,0.57)开始判断其2米范围内是否存在其他多个目标轨迹样本,若存在大于不同目标轨迹个数num(num取5),则将轨迹点x
min
作为进口停止线点,否则,依次从停车点集s中筛选比71.35大的点开始判断,直至找到进口停止线点,为了确定停止线,需要找到停止线的两个停止点,在[71.35-3.75,71.35+3.75]范围内按照上述规则寻找与x
min
非重复的另一个停止点x
′
min
(70.85,3.68);如果无法确定进口停止线的x坐标,则需要再获取10分钟的雷达目标轨迹点位数据,重复筛选疑似路口停车目标轨迹的点位信息和确定进口停止线步骤,直至找到满足条件的两个停止点x
min
和x
′
min
。根据两个停止点生成停止线,x
stop
=71.1,如图3标记为停止线。
[0034]
表1轨迹点位数据样例信息
[0035][0036]
s4:基于进口停止线提取进入路口的轨迹数据;从q中筛选出x坐标大于x
stop
的数据,根据轨迹x坐标的变化趋势区分轨迹的方向,如果x坐标按照时间排序递增,则为驶出路口轨迹样本;如果x坐标按照时间排序递减,则为进入路口轨迹样本,筛选出进入路口的轨迹数据,记为r。
[0037]
s5:根据轨迹数据进行聚类提取找到最内侧车道的中心线;最内侧车道的中心线提取方法为:从r中提取y坐标最小的前1/4的样本数据,根据x坐标每隔m米划分为一个区域z,对每个区域的数据集进行聚类,经过聚类迭代收敛后得到各区域的聚类中心,对于每个区域z,若聚类个数为1,则该数据簇的中心点即代表该区域中最内侧车道的中心点;若聚类个数大于1个,则聚类中心点中y坐标值最小的点即代表该区域中最内侧车道的中心点;记各区域最内侧车道中心点的集合为{(cx1,cy1),(cx2,cy2)...(cxn,cyn)},相邻两点间形成一条线,共组合成n-1条中心线,即为线集l。
[0038]
s6:进行雷达坐标转换;已知雷达的初始原点m经纬度为(a,b),航向角为83.5076;在高精底图上提取进口区域最内侧车道的中心线的两个端点p1、p2,以及最内侧车道中心线与停止线的交点o(lono,lato),按照大地坐标系转雷达坐标系的方法将p1、p2、o的经纬度坐标转换为雷达坐标系下的坐标;以原点m作为参考点,点m到点p1、p2、o的航向角分别为79.61、81.34、80.27,原点m的坐标即为(0,0),代入公式得出点p1、p2、o的雷达坐标分别为(56.62,10.14)、(60.55,8.16)、(71.78,5.85)。
[0039]
大地坐标系转雷达坐标系:以点o为例,点p1、p2转换方法与点o相同;若当前参考点m的经纬度坐标为(lon,lat),雷达航向角为α,点o的经纬度坐标为(lon1,lat1),地球半径为r,点o在雷达坐标系下的雷达坐标(x1,y1)计算方法如下:
[0040]
x1=d
·
cos(β)
[0041]
y1=d
·
sin(β)
[0042]
其中d为mo间的距离,β为点o与雷达x轴的夹角,θ为点o的航向角,计算方法如下:
[0043][0044]
β=α-θ
[0045][0046]
其中,进经度差和维度差计算方法如下:
[0047]
δlon=lon
1-lon
[0048]
δlat=lat
1-lat。
[0049]
s7:进行雷达航向角调整;通过余弦定理计算l中每条线与线p1p2的夹角η,可得到n-1个夹角的均值为更新雷达的航向角:α=83.5076+6.37=89.8776。
[0050]
s8:进行雷达原点位置调整;雷达原点位置调整的方法为:通过高精地图提取道路中心线与车道停止线的交点o(lono,lato),计算雷达坐标系下的停止线与内测车道中心线的交点,记为o
′
(xo′
,yo′
),其中xo′
=x
stop
,按照雷达坐标系转大地坐标系的方法将交点o
′
(xo′
,yo′
)的雷达坐标转换为经纬度坐标,记为o
′
(lono′
,lato′
),更新雷达原点的经纬度:
[0051]
lon=lon+(lono′-lono)
[0052]
lat=lat+(lato′-lato)。
[0053]
雷达坐标系转大地坐标系:以点o
′
(xo′
,yo′
)为例,若当前参考点n的雷达坐标为(x,y),大地坐标系的经纬度坐标为(lon,lat),雷达航向角为α,点o
′
的雷达坐标为(xo′
,yo′
),地球半径为r,点o
′
的在大地坐标系下的经纬度坐标(lono′
,lato′
)的计算方法如下:
[0054][0055][0056]
其中θ为点o
′
的航向角,d为no
′
间的距离,计算方法如下:
[0057]
θ=α-arctan(y,x)
[0058][0059]
s9:经过迭代优化后进行修正结果的准确性评估;重复s7与s8,进行迭代优化,其中lon
min
、lat
min
、θ
min
分别取0.0001、0.0001、1,直至优化后的值满足lono′-lono<lon
min
且lato′-lato<lat
min
且其中lon
min
、lat
min
、θ
min
分别为经度变化最小阈值、纬度变化最小阈值、角度变化最小阈值;结束迭代;雷达原点修正前后雷达轨迹在高精地图匹配效果如图4、5所示。
[0060]
修正结果的准确性评估的方法为:选取同时被多个雷达识别到的车辆轨迹,计算
在同一时刻不同雷达识别出的距离误差,如果距离误差小于一个车身距离,则说明修正后的雷达信息准确,否则不准确,采集路口内四个雷达识别的1000个同一运动车辆目标,计算其轨迹点位置偏差,评价结果如表2所示。
[0061]
表2评价结果表
[0062]
评价指标指标值位置偏差小于2米占比86%位置偏差小于5米占比90%
[0063]
通过表2可以看出,本发明的雷达原点信息修正方法修正后的雷达原点准确;本发明通过自动修复路口交通场景下雷达原点信息,不仅使得路口目标车辆轨迹与高精地图定位高精度匹配,也为车辆平行仿真及数字化道路提供基础。
[0064]
以上所述的实施例只是本发明的一种较佳的方案,并非对本发明作任何形式上的限制,在不超出权利要求所记载的技术方案的前提下还有其它的变体及改型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1