一种Loran-C定时和定位终端中连续波干扰检测方法
一种loran-c定时和定位终端中连续波干扰检测方法
技术领域
1.本发明属于陆基无线电授时和导航信号处理领域,涉及一种干扰检测方法,主要用于loran-c定时和定位应用终端中。
背景技术:
2.全球卫星导航系统(gnss)的信号微弱,易受干扰、易受欺骗、易受遮挡,是军事打击目标,在非常时期存在位置和时间服务保障的可靠性问题。而loran-c系统具有发射功率大、抗干扰能力强、信号作用距离远、相位稳定等优点,是一种远程陆基无线电定位、导航和授时服务系统,国际上公认loran-c系统可作为卫星导航系统理想的补充和备份。我国现有的loran-c系统有“长河二号”导航系统和bpl授时系统,同时将在我国西部增补三个新的loran-c授时台,建成以后会与现有系统基本实现loran-c信号的全国覆盖。
3.但是随着空间中电磁环境的日益复杂,loran-c接收信号中的连续波干扰日益严重,连续波干扰是外界辐射源带内信号、杂散或谐波信号落入loran-c频段内或附近而形成的干扰,主要来源是电台干扰和电力干扰,连续波干扰包括宽带干扰和窄带干扰。连续波干扰会导致loran-c信号畸变,影响信号幅度和相位的检测。loran-c定时和定位终端在进行信号处理前,首先需要对连续波干扰进行检测和抑制,抑制一般采用iir数字陷波器和lms自适应滤波器,连续波干扰检测一般通过快速傅里叶变换后在频域检测。但频域检测存在以下三个问题:(1)loran-c信号时域表现为突发性,在干扰检测时,连续波干扰与loran-c信号频谱发生混叠,影响检测门限设置和检测性能;(2)当连续波干扰和噪声的幅度比较小时,连续波干扰谱线将会淹没在噪声谱中,导致检测灵敏度低;(3)由于应用终端中射频前端中滤波器等器件的原因,导致频谱的曲线噪低表现为非平稳而出现慢变的趋势项,趋势项会导致检测门限不合理,影响检测门限的计算和检测准确度。这三个方面问题会严重影响连续波干扰检测的灵敏度和准确度,进而会导致连续波干扰抑制效果差,最终影响loran-c定时和定位结果的准确性和稳定性。
技术实现要素:
4.为了克服现有技术的不足,本发明提供一种loran-c定时和定位终端中连续波干扰检测方法,对loran-c终端中通过ad芯片采集到的数字信号中连续波干扰进行检测,能够提高loran-c接收信号中连续波干扰检测的灵敏度和准确度。
5.本发明解决其技术问题所采用的技术方案包括以下步骤:
6.步骤1,对loran-c台站的脉冲组信号进行轮询捕获,确定出能够捕获到的loran-c 脉冲组位置并在时域进行标记,确定脉冲组的起始和结束概位;没有捕获到脉冲组信号则整个时域为静默区;
7.步骤2,在静默区内提取m组长度为n的连续数据序列xi(n),i表示第i组数据,i=1
…
m;n表示每组数据序列中的第n个数据,n=1
…
n;
8.步骤3,对m组数据中每组长度为n的数据序列x(n)加窗后进行快速傅里叶变换并
取绝对值,得到数据序列xi(n)的幅度谱xi(n);
9.步骤4,对m组幅度谱数据序列xi(n)对应点数据进行累加取平均,得到非相干累积结果
10.步骤5,对数据x
′
(n)滑动中值滤波,输出数据序列为x
″
(n);
11.步骤6,采用数据拟合方法对数据序列x
″
(n)进行拟合,得到一条光滑的趋势项拟合曲线
12.步骤7,利用非相干累积结果x
′
(n)减去趋势项拟合结果获得的噪低平稳的谱线
13.步骤8,对谱线数据y(n)进行自适应门限计算;
14.步骤9,利用门限th与谱线数据y(n)进行比较对干扰谱线脉冲检测,大于门限th则认为存在干扰谱,取一段大于门限数据的中间值作为连续波干扰频点,进行连续波干扰抑制。
15.所述的步骤2中长度n根据实际分辨率要求选取,分辨率计算公式为fs/n,fs为 ad采样率。
16.所述的步骤5对数据x
′
(n)滑动取2m+1数据,m为阶数;滑动中值滤波按照正序/ 逆序方式排列数据,取中点数据作为滤波输出,输出数据序列为x
″
(n),
17.x
″
(n)=median(|x
′
(n-m)|,|x
′
(n-m+1)|,
…
|x
′
(n)|,
…
,|x
′
(n+m-1)|,|x
′
(n+m)|)
18.其中,median(*)表示对2m+1各数据滑动中值滤波。
19.所述的步骤6采用的拟合方法为最小二乘法拟合或多项式拟合。
20.所述的步骤8对谱线数据y(n)进行升序排列,取前n/2点的谱线数据通过计算方差设置门限,门限式中为n/2点谱线的方差;c为门限系数。
21.所述的门限系数c取2~10。
22.所述的步骤9选取级联数字iir或自适应lms陷波器进行连续波干扰抑制。
23.本发明在loran定时或定位终端中连续重复进行步骤1~9,将连续波干扰抑制后的数字信号继续进行捕获,找出存在的脉冲组信号后重新确定静默区,并对静默区的 ad数据进行连续波干扰检测,检测后进行抑制,并将抑制后的信号送入下一级 loran-c信号处理模块使用。
24.本发明的有益效果是:
25.(1)本发明结合loran-c信号捕获结果,选择没有loran-c脉冲组位置的静默区获得频谱,能够减小loran-c谱线对连续波干扰检测的影响。
26.(2)本发明通过非相干累加处理抑制噪声谱,能够提高连续波干扰检测的灵敏度。
27.(3)本发明通过滑动中值滤波抑制连续波干扰谱线后,通过曲线拟合方法能够消除趋势项,获得噪底平稳的干扰谱线,能够减少趋势项对连续波干扰检测的影响。
28.(4)本发明采用自适应门限,门限与噪底有关,能够提高连续波干扰检测概率。
附图说明
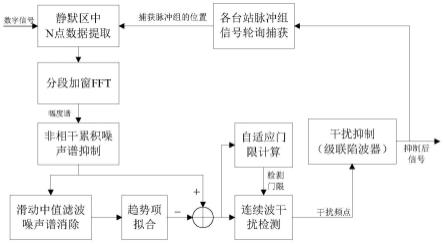
29.图1是本发明所述连续波干扰检测方法的实现过程示意图;
30.图2是实施例通过ad采集的时域信号和捕获后确定的脉冲组位置和静默区示意图;
31.图3是实施例n点数据序列单次fft结果示意图;
32.图4是实施例m组数据非相干累加结果示意图;
33.图5是实施例滑动中值滤波结果示意图;
34.图6是实施例谱线中趋势项拟合结果示意图;
35.图7是实施例趋势项消除结果示意图;
36.图8是实施例连续波干扰检测示意图。
具体实施方式
37.本发明是对loran-c终端中通过ad芯片采集到的数字信号中连续波干扰进行检测,设ad采样率为fs,具体实施步骤为:
38.步骤1:loran-c脉冲组信号轮询捕获。连续波干扰检测前先对loran-c台站的脉冲组信号进行轮询捕获,确定出能够捕获到的loran-c脉冲组位置并在时域进行标记,确定脉冲组的起始和结束概位。没有loran-c脉冲组的时域部分本发明称为loran-c信号静默区,如果没有捕获到脉冲组信号则整个时域为静默区。连续波干扰检测采用静默区数据,这样可以减小loran-c脉冲信号对连续波干扰检测的影响。
39.步骤2:静默区内数据提取。在静默区内提取m组长度为n的连续数据序列xi(n), i表示第i组数据,i=1
…
m;n表示每组数据序列中的第n个数据,n=1
…
n。其中长度n可根据实际分辨率要求选取,分辨率计算公式为:fs/n。
40.步骤3:分段加窗fft。对m组数据中每组长度为n的数据序列x(n)加窗后进行快速傅里叶变换(fft),并取绝对值,得到数据序列xi(n)的幅度谱xi(n)。加窗的目的是防止连续波干扰被截断在进行fft时,导致频谱泄露而产生旁瓣或者拖尾现象,窗函数也可根据需要选取。
41.步骤4:非相关累积噪声谱抑制。对m组幅度谱数据序列xi(n)对应点数据进行累加取平均,得到非相干累积结果x
′
(n):非相关累积可提高干扰谱线的信噪比,信噪比提升增益为:
42.步骤5:滑动中值滤波。对数据x
′
(n)滑动取2m+1数据,m为阶数。滑动中值滤波按照正序/逆序方式排列数据,取中点数据作为滤波输出,输出数据序列为x
″
(n): x
″
(n)=median(|x
′
(n-m)|,|x
′
(n-m+1)|,
…
|x
′
(n)|,
…
,|x
′
(n+m-1)|,|x
′
(n+m)|),滑动中值滤波是为了消除谱线中连续波干扰谱,其中median(*)表示对2m+1各数据滑动中值滤波。
43.步骤6:趋势项拟合。采用数据拟合方法对数据序列x
″
(n)进行拟合,得到一条光滑的趋势项拟合曲线拟合方法可选择采用最小二乘法拟合、多项式拟合等。
44.步骤7:趋势项消除。利用非相干累积结果x
′
(n)减去趋势项拟合结果获得
的噪低平稳的谱线y(n):
45.步骤8:自适应门限计算。为避免干扰谱线的影响,对谱线数据y(n)进行升序排列,取前n/2点的谱线数据通过计算方差设置门限,门限计算公式为:式中为 n/2点谱线的方差;c为门限系数,可根据需求可以取2~10。
46.步骤9:连续波干扰检测与抑制。利用门限th与谱线数据y(n)进行比较对干扰谱线脉冲检测。大于门限th则认为存在干扰谱,取一段大于门限数据的中间值作为连续波干扰频点,检测完成后进行连续波干扰抑制,抑制可根据需求选取级联数字iir或自使用lms陷波器。
47.本发明在loran定时或定位终端中将连续重复进行步骤1~9。将连续波干扰抑制后的数字信号继续进行捕获,找出存在的脉冲组信号后重新确定静默区,并对静默区的ad数据进行连续波干扰检测,检测后进行抑制,并将抑制后的信号送入下一级loran-c 信号处理模块使用。
48.本发明所提连续波干扰检测方法可在loran-c定时和定位终端中的fpga、dsp或 arm等数字信号处理芯片上实现。为了更清楚地说明本发明的技术方案,下面结合附图和实施例对本发明进一步说明,显而易见,下面描述中的附图仅仅是本发明的其中实施例之一,实施例中所采用公知技术本发明未详细列出,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图和相关参数获得其他附图,但本发明包括但不仅限于下述实施例。
49.图1是本发明中所述方法的实现过程,所述实施例ad芯片采样率为2mhz。
50.图2中实线是实施例通过ad芯片采集到的时域数字信号,首先对数字信号中存在的loran-c脉冲组信号通过捕获方法进行检测,附图2虚线是确定的loran-c脉冲组信号位置和静默区。
51.在静默区中取出m组长度为n的数据序列,本实施例m=64,n=4096。对每段4096 点数据进行快速傅里叶变换(fft)后求取绝对值,获得幅度谱为图3中所示,窗函数本发明选取hanning窗。附图3中可看出整个频域由连续波干扰谱线、噪声谱线和趋势项组成。
52.对64段频谱数据对应点进行非相干累加,抑制噪声谱,非相干累加结果如图4中所示,可看出频域只剩下连续波干扰谱线和趋势项,噪声谱抑制后连续波谱线更加明显。
53.对图4中的频谱数据进行滑动中值滤波,本发明滤波器长度取25,中值滑动滤波结果如图5中所示,可看出虽然可以看出趋势项,但趋势项不够光滑。
54.对图5中的中值滤波结果进行趋势项拟合,本发明采用的是最小二乘曲线拟合方法,拟合结果如图6中所示,可以看出获得曲线较光滑的趋势项。
55.用图4中非相干累加的频谱减去图6中拟合的趋势项,趋势项消除结果如图7所示,可看出获得了噪底较为平稳的连续波干扰谱线。
56.对图7中的谱线数据从小到大进行排列,取前n/2=2048个数据,求取其方差门限系数c本实施例取4,因此计算门限为
57.利用门限th对图7频谱中干扰进行检测,大于门限的一段频谱数据对应频点的中间值为连续波干扰频点,检测出的连续波干扰频点如图8中标记点的x轴所示。
58.最后对检测到的连续波干扰频点在ad采集的数字信号中进行抑制,将抑制后的数
字信号输入给下一级loran-c信号处理过程使用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1