一种涡旋波/IMU融合的建筑形变监测方法及系统
一种涡旋波/imu融合的建筑形变监测方法及系统
技术领域
1.本发明涉及变形监测领域,具体涉及一种涡旋波/imu融合的建筑形变监测方法及系统。
背景技术:
2.惯性测量单元(inertial measurement unit,简称imu)是测量物体三轴姿态角(或角速率)以及加速度的装置。现有imu用于建筑物的变形监测技术常用的与gnss进行融合的变形监测一体化,由于gnss信号在传输过程中受到大气延时误差以及多路径等误差影响,从而给融合监测结果受到影响。
技术实现要素:
3.本发明的目的在于能够克服现有技术存在的基站资源利用率低,通信信息开销量大,传播信号受其他信号干扰等问题,提出了一种高精度的实时快速涡旋波与imu融合变形监测方法。
4.根据本发明实施例的一个方面,提供一种涡旋波/imu融合的建筑形变监测方法,包括,
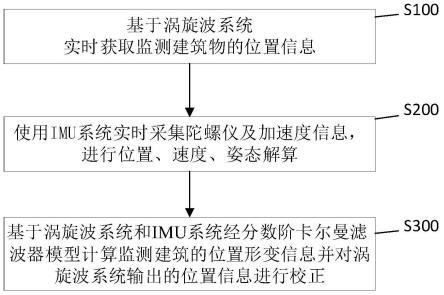
5.s100基于涡旋波系统实时获取建筑物的位置信息;
6.s200使用imu系统实时采集陀螺仪及加速度信息,进行位置、速度、姿态解算;
7.s300基于涡旋波系统和imu系统经分数阶卡尔曼滤波器模型计算监测建筑的位置形变信息并对涡旋波定位系统输出的位置信息进行校正。
8.所述涡旋波系统包括涡旋波发射器和涡旋波接收器,所述涡旋波发射器发射涡旋波信号,所述涡旋波接收器用于接收多个携带反射相位信息的涡旋波反射回波信号,以获取所述涡旋波接收器的距离,并根据空间交会原理,实时获取涡旋波接收器的位置信息,以得到建筑物的形变参数信息。
9.在一些实施方案中,所述涡旋波系统至少包括4个涡旋波发射器,1个涡旋波接收器。
10.在一些实施方案中,所述涡旋波发射器数量大于4,所述imu系统包括多个imu组成的mems imu阵列,有助于提高低成本imu位姿测量精度。
11.通过所述imu系统输出加速度和陀螺仪信息,使用误差补偿算法进行数据处理,建筑物模态因子进行约束,消除位姿估算误差,由姿态矩阵将建筑物的加速度和陀螺仪信息变换到地理坐标系,求取姿态角,利用最小二乘法进行多项式拟合,得到建筑物的变形曲线。
12.在一些实施方案中,所述imu系统与所述涡旋波系统输出数据对应于同一时刻,两系统采用统一的时间坐标。
13.步骤s300包括:
14.s310根据imu动态误差模型建立变形监测状态方程,利用涡旋波和imu位置速度误
差建立量测方程;
15.s320根据所述涡旋波系统及imu系统观测量及观测方程求取当前新息及量测残差值;
16.s330根据当前所述量测残差值求取滑动窗口长度;
17.s340依据所述滑动窗口长度大小计算新息均值,对所述涡旋波量测信号噪声协方差进行实时计算;
18.s350根据所述噪声协方差调节滤波增益,进行位移解算。
19.所述计算方法基于grunwald-letnikov分数阶微分定义推导分数阶滤波器模型建立方程。
20.根据本发明实施例的另一方面,提供一种涡旋波/imu融合的建筑形变监测系统,包括,涡旋波系统、imu系统和控制单元,其中,所述涡旋波系统包括涡旋波发射器和涡旋波接收器,所述imu系统实时采集陀螺仪及加速度信息,所述控制单元基于所述涡旋波系统和所述imu系统所采集的信息进行前述涡旋波/imu融合的建筑形变监测方法的解算,并基于计算结果反馈校正涡旋波系统结果得出建筑物变形信息。
21.所述涡旋波信号发射器包括电磁波源、透镜、同轴计算全息图和准光学望远镜,所述电磁波源置于所述透镜前焦平面,发出毫米波电磁波束,所述透镜实施对所述电磁波束进行傅立叶变换,所述同轴计算全息图放置于所述透镜的后焦平面之后,紧贴所述后焦平面的位置,由空间光调制器显示,所述准光学望远镜,对所述电磁波束进行扩束准直。
22.从而,本发明应用涡旋波/imu融合的建筑形变监测方法,极大地改善了传统gnss与imu融合方法中的gnss信号传输误差带来的问题,能够最大可能减少通信信息利用率的损耗及传输信号受外界因素的影响,较好的实现建筑形变监测。
附图说明
23.为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
24.图1为本发明一种涡旋波/imu融合建筑形变监测方法示意图;
25.图2为一种imu系统进行位置、速度、姿态解算方法示意图;
26.图3为本发明一种涡旋波/imu分数阶卡尔曼滤波融合方法示意图;
27.图4为本发明一种涡旋波/imu融合的建筑形变监测方法计算反馈关系示意图。
具体实施方式
28.下面将结合本发明实施例中附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
29.根据本发明实施例的一个方面,提供一种涡旋波/imu融合的建筑形变监测方法,如图1所示,主要包括如下步骤:
30.s100基于涡旋波系统实时获取建筑物的位置信息。
31.涡旋波系统包括涡旋波发射器和涡旋波接收器,涡旋波接收器用于接收多个携带
反射相位信息的涡旋波信号,以获取涡旋波接收器的距离,根据空间交会原理,实时获取涡旋波接收器的位置信息,即得到建筑物的形变参数信息。
32.以高层建筑物为例,涡旋波/imu融合变形监测设备布设在建筑物顶部,即涡旋波接收器亦布设在建筑物顶部,在距离建筑物100-300m水平距离的位置布设多台涡旋波发射器基站,实时测得每一个涡旋波发射器与涡旋波接收器之间的距离,并记录传输的时间,计算时间差,利用空间交会原理,计算布设建筑物顶部的涡旋波接收器位置变化情况。
33.其中,涡旋波系统主要由涡旋波发射器和涡旋波接收器组成,涡旋波发射器的位置已知,涡旋波接收器位于建筑物的变形观测节点上,在建筑物变形监测中属于位置未知状态。涡旋波发射器向涡旋波接收器依照某频率发射具有初始相位信息的毫米波涡旋波信号,涡旋波接收器获取携带反射相位信息的涡旋波信号,进行移相处理,并对多个移相结果信息求和得到信号幅值,获得每一个涡旋波发射器与涡旋波接收器之间的距离,利用空间交会原理,获取位置信息。
34.由于涡旋波发射器的位置精确可知,在观测中,我们可得到涡旋波发射器到涡旋波接收器的距离,利用空间交会原理,利用3个涡旋波发射器,就可以组成3个方程式,解出涡旋波接收器的位置(x,y,z),即建筑物的形变参数信息。考虑到涡旋波发射器的时钟与涡旋波接收器之间的误差,实际上有4个未知数,x、y、z和钟差,因而需要引入第4个涡旋波发射器,形成4个方程式进行求解,从而得到涡旋波接收器的精确位置信息。因此,涡旋波系统至少要包括4个涡旋波发射器。
35.事实上,涡旋波接收器往往可以对应4个以上的涡旋波发射器,这时,涡旋波接收器可按涡旋波发射器的分布分成若干组,每组对应4个涡旋波发射器,然后根据测量平差原理,消除不符值,进行涡旋波接收器的位置确定,并评定定位精度。因此,在一些实施例中,所述涡旋波发射器数量大于4,涡旋波接收器数量根据用户需要确定,imu系统包括多个imu组成的mems imu(micro-electro-mechanical system,inertial measurement unit)阵列(mimus),有助于提高低成本imu位姿测量精度。
36.s200使用imu系统实时采集陀螺仪及加速度信息,进行位置、速度、姿态解算。
37.本发明中imu系统输出加速度和陀螺仪信息,使用误差补偿算法进行数据处理,建筑物模态因子进行约束,消除位姿估算误差,由姿态矩阵将建筑物的加速度和陀螺仪信息变换到地理坐标系,求取姿态角,利用最小二乘法进行多项式拟合,得到建筑物的变形曲线。为保证imu/涡旋波系统输出数据对应于同一时刻,系统采用统一的时间坐标。可使用imu进行积分运算得到相应位置、速度、姿态等信息,可选的一种计算方法可由图2所示,在此不再赘述。
38.s300基于涡旋波系统和imu系统经分数阶卡尔曼滤波器模型计算监测建筑的位置形变信息并对涡旋波定位系统输出的位置信息进行校正。
39.通过涡旋波和imu信息经分数阶卡尔曼滤波器模型计算监测建筑的位置形变信息并对涡旋波输出结果进行校正,可以有效提高建筑形变监测精度。具体的,在一些实施例中,计算方法可如图3所示:
40.s310根据imu动态误差模型建立变形监测状态方程(1)和(2),利用涡旋波和imu位置速度误差建立量测方程(3)。
41.方程可由grunwald-letnikov(gl)分数阶微分定义推导分数阶滤波器理论建立:
[0042][0043][0044]
其中,
[0045]
zk=hxk+vk............................(3)
[0046]ad
=a-i,i是单位阵,zk是得到的位移变化量,uk是系统控制输入,wk是系统噪声。ad是状态转移矩阵,b为输入系数矩阵,h是系统量测矩阵,vk是量测噪声。为涡旋波定位系统在确定的涡旋波接收器位置信息,xk为k时刻imu与涡旋波系统的位置速度差值观测量,
[0047]
s320根据涡旋波系统及imu系统观测量及观测方程求取当前新息及量测残差值。
[0048]
依据融合变形监测解算频率,根据解算得到的imu位置,速度信息,计算新息向量的大小,以及量测残差值。其中,量测残差值大小反映了涡旋波定位系统确定位置的噪声大小。
[0049][0050]
新息向量的协方差为:
[0051][0052]
量测残差值为:
[0053][0054]
s330根据当前量测残差值求取滑动窗口长度。
[0055]
从而利用量测残差值,对滑动窗口长度进行自动调节。
[0056]
n=1,d》α
max
[0057]
n=k,d《α
min
[0058][0059]
易知,滑动窗最小长度为1,即n=1。ck只取决于当前新息,与历史新息序列无关。此时,当前新息比重对噪声估值起了最大作用,残差值大于设置的最大阈值,d》α
max
。λ为调节因子,它的大小决定了滑动窗口随量测残差大小的变化趋势,λ《1,n≥1。
[0060]
其中,α
max
与α
min
为预先设定的最大阈值与最小阈值。
[0061]
s340依据滑动窗口大小计算新息均值,对涡旋波量测信号噪声协方差进行实时计算。
[0062][0063]
根据滑动窗口大小计算k,k-1,k-2,......,k-n+1时刻新息方差的均值,作为进一
步估算观测噪声方差阵的依据。
[0064][0065]
其中,rk为量测噪声协方差;p
k,k-1
为一步预测误差均方差;ck为新息协方差。
[0066]
s350根据噪声方差调节滤波增益,进行位移解算。
[0067]
将噪声协方差代入到滤波预测过程及量测更新过程,根据噪声方差调节滤波增益,进行位移解算:
[0068][0069][0070][0071]
pk=(i-k
khk
)p
k,k-1
........................(13)
[0072]
其中,为状态变量预测值,为当前状态估计值,对于非线性系统,可通过一阶泰勒展开获得:vk为新息;q
k-1
为自适应滤波中的系统噪声协方差;k为滤波增益阵。
[0073]
计算反馈关系可由图4所示,在建筑形变监测中,以涡旋波监测的建筑物位置变化情况为基准,通过涡旋波联合imu建立分数阶卡尔曼模型解算结果进而对涡旋波定位系统监测的建筑物位置变化情况进行输出校正,同时,还反过来对imu的位置、速度、姿态信息进行反馈校正,进一步提高了位移解算精度。
[0074]
并且,该实施例的计算方法,基于新息序列的自适应算法,提出了根据基于当前量测残差自动调节滑动窗长度的方法,进行在线噪声估计,将新息值与噪声估计有效地结合起来,既保证了系统的原有平稳特性,又充分利用新息序列对时变噪声进行有效的在线估计。通过对滑动窗大小的自动调节,有效地将新息引入到噪声估值中来,可在量测信号噪声增大时,减小滤波增益,降低量测信号对融合位置信息测定的作用;在量测信号噪声减小时,加大滤波增益,增大新息对融合位置信息测定的影响,自动延长的滑动窗口又保持了系统的平稳特性,有效的解决了系统长时间运行后由时变噪声导致的精度下降的问题,提高了融合位置信息测定的精度。
[0075]
在一些实施例中,在s300步骤中,当面对短期监测的需求时,还可以采用多模自适应估计算法采用多个并行卡尔曼滤波器实现对模型及噪声的估计。此外,还可以采用sage-husa噪声统计估值器采用新息序列均值法对噪声进行估计,以此等等,不再赘述。
[0076]
根据本发明实施例的另一个方面,提供一种涡旋波/imu融合的建筑形变监测系统,包括涡旋波系统、imu系统和控制单元,其中,涡旋波系统包括涡旋波发射器和涡旋波接收器。
[0077]
在本发明中涡旋波发射器作为基站,涡旋波信号发射器包括电磁波源、透镜、同轴计算全息图和准光学望远镜。其中的电磁波源发出电磁波束,由透镜傅立叶变换后,到达同轴计算全息图获得轨道角动量,通过计算机编程把要传输的信息数据以轨道角动量编码的形式载入电磁波束中,再经准光学望远镜扩束后发射出去,在自由空间中传播。
[0078]
其中,在电磁波源的选择上,当采用不同的波段进行通信时,所对应的电磁波产生器就为相应的波源,不同的波段主要针对不同的通信目的。选用毫米波波段防止大气扰动
比较严重时,电磁波产生器就为毫米波源,并将毫米波源置于透镜前焦平面。
[0079]
透镜,对电磁波束进行傅立叶变换。
[0080]
同轴计算全息图,放置于透镜的后焦平面之后,紧贴后焦平面的位置,由空间光调制器显示,这样可实时再现相息图,无需经过以往对胶片的显影和漂白等麻烦的工艺。相息图只能产生零级和级共线性的衍射,零级产生的仍为不带角动量的波束,用来对系统的排列进行校准。计算机预先以轨道角动量值的形式设定好信息的编码值,对相息图一级衍射产生的角动量值进行控制。
[0081]
准光学望远镜,对电磁波束进行扩束准直。
[0082]
涡旋波系统中,涡旋波接收器位于建筑物的变形观测节点上,涡旋波发射器布设在距离建筑物100-300m水平距离的位置上,实时测得每一个涡旋波发射器与涡旋波接收器之间的距离。涡旋波接收器接收多个携带反射相位信息的反射回波信号,获取涡旋波接收器的距离。
[0083]
imu系统实时采集陀螺仪及加速度信息。
[0084]
控制单元基于涡旋波系统和imu系统所采集的信息进行上述涡旋波/imu融合的建筑形变监测方法的解算,并基于计算结果反馈校正涡旋波系统结果得出建筑物变形信息。
[0085]
本发明创新地应用涡旋波/imu融合的建筑形变监测方法,极大地改善了传统gnss与imu融合方法中的gnss信号传输误差带来的问题,能够最大可能减少通信信息利用率的损耗及传输信号受外界因素的影响,较好的实现建筑形变监测。
[0086]
虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1