三向可调节试验加载系统的制作方法
1.本发明涉及试件强度试验技术领域,具体地,涉及一种三向可调节试验加载系统。
背景技术:
2.太阳翼柔性伸展机构需对其进行全展开状态考核,全展开状态高达14米,机构顶部需同时施加弯、剪、压载荷。当机构承受全部载荷时,其顶部变形最大可达1米,载荷方向需与试件变形随动。太阳翼柔性伸展机构的工作环境为太空微重力环境,静力试验考核中需对环境进行模拟。
3.现有公开号为cn214749429u的中国专利,其公开了一种多向可调三轴加载装配式试验装置,涉及岩土工程技术领域。本实用新型包括固定架、模型箱、x向加载组件、y向加载组件和z向加载组件,固定架的内部固定有模型箱,模型箱的左侧设置有x向加载组件,模型箱的背侧设置有y向加载组件,模型箱的上方设置有z向加载组件。
4.发明人认为现有技术中缺乏对环境进行模拟的试验系统,需要提供一种合理的系统结构。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种三向可调节试验加载系统。
6.根据本发明提供的一种三向可调节试验加载系统,包括:试验件、重力平衡系统、随动加载系统以及承力地轨;所述试验件安装在所述承力地轨上;所述重力平衡系统包括气囊和弯剪压耦合加载工装,所述弯剪压耦合加载工装设置在所述试验件的顶部,所述气囊设置在所述弯剪压耦合加载工装的顶部,所述气囊用于平衡所述重力平衡系统的重力;随动加载系统包括侧向承力柱、可调节加载系统以及加载件;所述侧向承力柱设置在所述试验件的加载方向,且所述侧向承力柱的底部与所述承力地轨紧固连接;所述加载件的载荷通过所述可调节加载系统传递给所述弯剪压耦合加载工装;所述可调节加载系统安装在所述侧向承力柱上,且所述可调节加载系统的位置和高度通过所述弯剪压耦合加载工装的加载点位置确定。
7.优选地,所述气囊内充入的气体包括氦气。
8.优选地,所述侧向承力柱包括立柱和底座;所述底座设置有凸缘,所述凸缘设置有安装孔,所述底座通过所述安装孔与所述承力地轨紧固连接。
9.优选地,所述立柱的立面上分布有双排等宽、等间距的连接孔;所述可调节加载系统包括底板,所述底板上设置有两侧腰型孔;所述立柱与所述可调节加载系统通过所述连接孔和所述腰型孔二者的配合装配连接。
10.优选地,所述底板上设置有相互平行的直线导轨和滚轴丝杆,所述直线导轨包括标准滚珠式线性导轨,所述滚轴丝杆的长度和直径与所述直线导轨相匹配。
11.优选地,所述直线导轨和所述滚轴丝杆之间连接有丝杆螺母连接块,所述丝杆螺母连接块沿所述滚轴丝杆方向移动。
12.优选地,所述可调节加载系统还包括丝杆和定滑轮,所述定滑轮设置在所述丝杆上;所述丝杆通过螺纹连接块与所述丝杆螺母连接块紧固连接;所述定滑轮沿所述滚轴丝杆运动方向和所述丝杆方向移动。
13.优选地,所述加载件包括砝码和钢丝绳,所述钢丝绳穿过所述定滑轮;所述钢丝绳的一端与所述弯剪压耦合加载工装的加载点紧固连接,另一端与所述砝码紧固连接。
14.优选地,所述试验件通过固定底板安装在所述承力地轨上;所述固定底板与所述试验件上设置有相匹配的连接孔;所述固定底板四个角设置有通孔,通过地轨螺栓与所述承力地轨紧固连接。
15.优选地,所述承力地轨包括t形截面,所述地轨螺栓包括与所述t形截面相匹配的t形结构。
16.与现有技术相比,本发明具有如下的有益效果:
17.1、本发明通过承力地轨与侧向承力柱的高刚度特性,通过弯剪压耦合加载工装及可调节加载系统将试验件高度方向的分布式载荷集中在顶部进行加载,有助于对载荷加载方向进行随动调整,有助于提高试验加载的精度。
18.2、本发明通过利用直线导轨的单向导向能力和丝杆的螺纹进给运动能力,有助于试验件剪力方向能够在试验件变形过程中,始终与试验件顶部表面的面外和面内方向保持一致,在试验载荷加载的情况下,有助于实现载荷双向调节的功能,有助于提高试验加载的精度。
19.3、本发明通过气囊产生的升力实施平衡试验件及加载工装的重力,有助于在随动加载过程中始终保持重力平衡状态,有助于模拟太空微重力环境。
附图说明
20.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
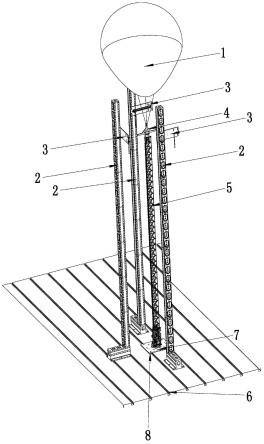
21.图1为本发明主要体现三向可调节试验加载系统整体结构的示意图;
22.图2为本发明主要体现气囊整体结构的示意图;
23.图3为本发明主要体现侧向承力柱整体结构的示意图;
24.图4为本发明主要体现可调节加载系统整体结构的示意图;
25.图5为本发明主要体现弯剪压耦合加载工装整体结构的示意图;
26.图6为本发明主要体现固定底板整体结构的示意图;
27.图7为本发明主要体现地轨螺栓整体结构的示意图。
28.图中所示:
29.气囊1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
侧向承力柱2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
可调节加载系统3
30.底板31
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
直线导轨32
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
滚轴丝杆33
31.丝杆螺母连接块34
ꢀꢀꢀꢀꢀꢀꢀ
螺纹连接块35
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
丝杆36
32.定滑轮37
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
弯剪压耦合加载工装4
ꢀꢀꢀꢀꢀ
试验件5
33.承力地轨6
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
固定底板7
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
地轨螺栓8
具体实施方式
34.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
35.如图1所示,根据本发明提供的一种三向可调节试验加载系统,包括:试验件5、重力平衡系统、随动加载系统以及承力地轨6;试验件5安装在承力地轨6上;重力平衡系统包括气囊1和弯剪压耦合加载工装4,弯剪压耦合加载工装4设置在试验件5的顶部,气囊1设置在弯剪压耦合加载工装4的顶部,气囊1用于平衡重力平衡系统的重力;随动加载系统包括侧向承力柱2、可调节加载系统3以及加载件;侧向承力柱2设置在试验件5的加载方向,且侧向承力柱2的底部与承力地轨6紧固连接;加载件的载荷通过可调节加载系统3传递给弯剪压耦合加载工装4;可调节加载系统3安装在侧向承力柱2上,且可调节加载系统3的位置和高度通过弯剪压耦合加载工装4的加载点位置确定。
36.本发明充分利用承力地轨6与侧向承力柱2的高刚度特性,通过弯剪压耦合加载工装4及可调节加载系统3将试件高度方向的分布式载荷集中在顶部进行加载。针对大型柔性机构顶部变形大,需要随动加载的要求,利用可调节加载系统3,对载荷加载方向进行随动调整。使用气囊1产生的升力实施平衡试验件及加载工装的重力,模拟太空微重力环境。
37.重力平衡系统包括气囊1和弯剪压耦合加载工装4。弯剪压耦合加载工装4设置在试验件5的顶部,弯剪压耦合加载工装4与试验件5通过螺栓装配。气囊1设置在弯剪压耦合加载工装4的顶部,气囊1通过螺钉与拉绳和弯剪压耦合加载工装4连接在一起,通过向气囊1内充入适量的氦气,使得气囊1的浮力与气囊1和弯剪压耦合加载工装重力平衡,并在试验件变形过程中始终保持重力平衡状态。气囊1通过充氦气产生的浮力需在地面通过弹簧测力计进行测量,其浮力与弯剪压耦合加载工装4的重力相等。利用气囊1的浮力将气囊1、弯剪压耦合加载工装4和试验件5的重力平衡,且在随动加载过程中始终保持重力平衡状态,模拟了试验件工作时所处的太空微重力状态。
38.侧向承力柱2包括立柱和底座。侧向承力柱2的底座设置有凸缘,凸缘设置有安装孔,底座通过安装孔与承力地轨6紧固连接。侧向承力柱作为辅助受力构件,由表架和铸块底座装配而成,铸块底座的底面通过地轨螺栓8与承力地轨6连接,使得侧向承力柱2与承力地轨6连接成一体。
39.侧向承力柱2的立柱的立面上分布有双排等宽、等间距的连接孔;可调节加载系统3包括底板31,底板31上设置有两侧腰型孔;立柱与可调节加载系统3通过连接孔和腰型孔二者的配合装配连接。侧向承力柱2为若干表架螺接而成,便于调整可调节加载系统3的安装高度,侧向承力柱2的立面上设有均布的连接孔,用于与可调节加载系统3的腰形孔连接,使得可调节加载系统3与弯剪压耦合加载工装4上的剪力加载点安装在同一高度。将可调节加载系统3与侧向承力柱2连接在一起,利用侧向承力柱的高刚度,提高了高空加载点处的侧向刚度。
40.可调节加载系统3为双向可调结构,底板31为一长方形方板,其截面尺寸由需调节的长度决定。可调节加载系统3的底板31上设置有相互平行的直线导轨32和滚轴丝杆33。底板31上同时开有多个螺纹通孔,用于直线导轨32和滚轴丝杆33的固定。滚轴丝杆33的长度
和直径与直线导轨32相匹配,安装时通过底板31上的螺纹孔来保证其与直线导轨32的平行度。
41.直线导轨32包括标准滚珠式线性导轨,由滑块、导轨和滚珠轴承构成。滑块与导轨通过滚珠轴承连接,导轨的截面可根据承载能力来选择,导轨为线性滑轨,其长度尺寸略大于需调节的长度,具体型号尺寸由试验所需载荷决定。
42.直线导轨32和滚轴丝杆33之间连接有丝杆螺母连接块34。滑块的一侧端面分布有若干螺纹孔接口,丝杆螺母连接块34上开有若干螺纹孔,丝杆螺母连接块34采用一体加工的方式,用于连接直线导轨32和滚轴丝杆33,使得丝杆螺母连接块34沿滚轴丝杆33方向移动。丝杆螺母连接块34具体尺寸由滚轴丝杆33所受的侧向力决定。
43.可调节加载系统3还包括丝杆36和定滑轮37,定滑轮37设置在丝杆36上。丝杆36包括20mm螺杆,应满足试验载荷要求,各连接面需满足承载要求。丝杆36通过螺纹连接块35与丝杆螺母连接块34紧固连接。螺纹连接块35上开有m20螺纹孔,两个螺纹连接块35通过螺纹与丝杆36螺接,两个螺纹连接块35之间的距离需依据丝杆36上所承受的横向载荷决定。
44.定滑轮37通过通孔与丝杆36连接,定滑轮37上下均连接一个螺帽,通过螺帽的反向旋转运动,将定滑轮37固定在丝杆36上的给定位置,通过对螺帽位置的调整来调整定滑轮37的位置。在丝杆36和丝杆螺母连接块34的配合下,使得定滑轮37能够沿滚轴丝杆33运动方向和丝杆36方向移动。
45.加载件包括砝码和钢丝绳,钢丝绳穿过定滑轮37;钢丝绳的一端与弯剪压耦合加载工装4的加载点紧固连接,另一端与砝码紧固连接。
46.本技术充分利用直线导轨32的单向导向能力和丝杆36的螺纹进给运动能力,使得试验件5剪力方向能够在试验件5变形过程中,始终与试验件5顶部表面的面外和面内方向保持一致,在试验载荷加载的情况下,实现了载荷双向调节的功能,提高了试验加载的精度。
47.试验件5通过固定底板7安装在承力地轨6上。固定底板7与试验件5上设置有相匹配的连接孔。固定底板7上开有台阶通孔,与试验件5底部连接孔相匹配,试验件5通过螺栓安装在固定底板7上。固定底板7四个角设置有通孔,通过地轨螺栓8与承力地轨6紧固连接。
48.承力地轨6作为试验室内的固定承载件,按一定的间距和承力能力设计,为t形截面,用于连接地轨螺栓8。地轨螺栓8作为紧固件,为t形结构,与承力地轨6的t形截面匹配,用于固定连接。
49.本技术通过以下步骤完成装配:
50.s1:将试验件5和固定底板7装配构成主平台,固定底板7上的通孔内穿入地轨螺栓8,与承力地轨6连接;
51.s2:在地面使用弹簧测力计测量弯剪压耦合加载工装4的重量,并对气囊1充氦气,使得气囊1产生的浮力与弯剪压耦合加载工装4的重力一致,然后使用拉绳和螺钉将气囊1和弯剪压耦合加载工装4连接,使其处于重力平衡状态;
52.s3:将气囊1与弯剪压耦合加载工装4的组合体升高至试验件5的顶部,通过螺丝与试验件5顶部接口连接;
53.s4:将侧向承力柱2移动至试验件5所需加载方向,侧向承力柱2下端凸缘上的孔内穿入地轨螺栓8与承力地轨6连接;
54.s5:将可调节加载系统3通过螺栓连接到侧向承力柱2上,其安装高度由弯剪压耦合加载工装4上的加载孔位置决定;
55.s6:将钢丝绳与弯剪压耦合加载工装4的加载孔连接,穿过定滑轮37,并下垂至地面附近,将砝码悬挂在钢丝绳上,通过旋转滚轴丝杆33调整丝杆螺母连接块34的位置,通过旋转螺帽,调整定滑轮37的位置,实现随动加载功能。
56.本技术充分利用气囊1产生的浮力,通过浮力抵消弯剪压耦合加载工装4和气囊1的重力,利用气囊1产生的浮力始终向上的原理,成功在地面模拟了太空微重力状态。使用滚轴丝杆33和定滑轮37的配合,实现了载荷的随动加载,提升了载荷的加载精度,在空间站柔性伸展机构静强度试验中得到了成功应用。
57.工作原理
58.将试验件5和固定底板7装配构成主平台,固定底板7上的通孔内穿入地轨螺栓8,与承力地轨6连接。在地面使用弹簧测力计测量弯剪压耦合加载工装4的重量,并对气囊1充氦气,使得气囊1产生的浮力与弯剪压耦合加载工装4的重力一致,然后使用拉绳和螺钉将气囊1和弯剪压耦合加载工装4连接,使其处于重力平衡状态。将气囊1与弯剪压耦合加载工装4的组合体升高至试验件5的顶部,通过螺丝与试验件5顶部接口连接。将侧向承力柱2移动至试验件5所需加载方向,侧向承力柱2下端凸缘上的孔内穿入地轨螺栓8与承力地轨6连接。将可调节加载系统3通过螺栓连接到侧向承力柱2上,其安装高度由弯剪压耦合加载工装4上的加载孔位置决定。将钢丝绳与弯剪压耦合加载工装4的加载孔连接,穿过定滑轮37,并下垂至地面附近,将砝码悬挂在钢丝绳上,通过旋转滚轴丝杆33调整丝杆螺母连接块34的位置,通过旋转螺帽,调整定滑轮37的位置,实现随动加载功能。
59.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
60.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1