基于延迟储备池计算的分布光纤传感系统及其信号识别与定位方法
1.本发明涉及一种分布光纤传感系统及其信号识别与定位方法,特别是一种基于延迟储备池计算的分布光纤传感系统及其信号识别与定位方法,属于光纤传感领域。
背景技术:
2.分布光纤传感系统利用光纤作为敏感元件和传输介质,可以连续长距离监测外界振动信号,在管线安全检测和周界防卫等领域得到了迅速发展。目前,分布光纤振动传感技术普遍存在误报率高、定位准确度低和处理速度慢的问题。
3.近年来机器学习在分布光纤振动传感中的应用逐渐成为研究热点。已有采用神经网络或其它机器学习模型识别不同类型的传感事件信号的大量研究,也有用于提高定位精度的报道。但无论是信号识别还是振动定位,都是硬件传感系统和软件学习模型的组合。由于软件的处理速度较慢,导致检测的实时性受限。此外,信号识别时一般都需事先提取信号特征。特征提取是一项耗时的工作,并且可能由于噪声干扰而导致不准确,因此,识别的速度和正确率都有待提高。更重要的是,大部分对信号识别的研究未考虑振动发生的位置,不同位置的同类振动很可能被误判成不同类型。因此,如何结合传感位置快速、正确地识别不同类型的外界振动,是该领域亟待解决的问题。
4.另一方面,储备池计算作为一种简化的递归神经网络得到学界的广泛关注。由于其训练过程简单,只需对输出连接权进行训练,输入连接权和内部连接权随机生成且固定不变,因此,易于用硬件实现。近年来,用光电和全光器件,特别是用延迟非线性系统实现的光或光电储备池计算,对于更高速更低功耗的信息处理具有重要意义,因而得到迅速发展。
技术实现要素:
5.本发明的目的在于克服已有技术存在的不足,提供一种基于延迟储备池计算的分布光纤传感系统及其信号识别与定位方法。本发明把光储备池计算和分布光纤传感系统合二为一,利用储备池计算对外界环境的敏感性响应来检测外界振动信号。采用基于硬件的延迟非线性系统实现光储备池计算,并将其储备池作为传感器实现分布光纤振动传感。通过机器学习思路来完成对外界振动的识别和定位。充分利用储备池计算强大的学习能力和建模能力,提高检测的准确性,利用光处理信息快和储备池计算测试过程简单的优势,提高检测的实时性。
6.为达到上述发明创造目的,本发明采用如下技术方案:
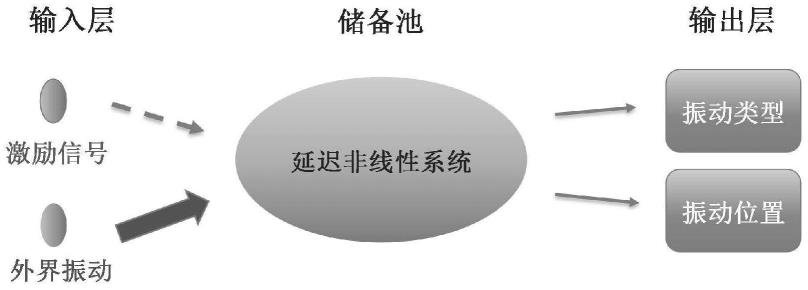
7.一种基于延迟储备池计算的分布光纤传感系统,由输入层、储备池和输出层组成。所述输入层有两个节点,一个输入储备池激励信号,另一个输入外界振动信号;所述储备池由一个延迟非线性系统构成,其延迟光纤即为传感光纤;所述输出层有两个节点,一个输出振动类型,另一个输出振动位置。
8.优选地,所述输入层用于输入储备池激励信号的节点不是必须的,即根据需要有
或者没有。
9.优选地,所述延迟非线性系统是全光延迟形式,或者是光电延迟形式,具体结构方面要求其既具备储备池的属性,又对不同位置不同类型的外界振动有不同的响应。
10.一种基于延迟储备池计算的分布光纤传感系统的信号识别与定位方法,利用本发明基于延迟储备池计算的分布光纤传感系统,包括如下步骤:
11.步骤1:系统启用前,先对延迟储备池计算进行训练。把一个优选的输入信号经过掩码后输入光储备池,激发出丰富的内部动态;在传感光纤的不同位置处施加各种振动类型信号,采集储备池的响应信号,获取相应的虚节点状态;以外界振动信号的类型和位置为目标输出进行网络训练,使储备池计算的输出逼近目标输出,确定合适的输出连接权。
12.步骤2:系统启用后,使用与训练阶段同样的输入信号和掩码信号激发储备池内部动态,采集储备池的响应信号,获取待测振动信号的虚节点状态,结合训练阶段得到的输出连接权,求得延迟储备池计算的输出,即振动信号的类型与位置。
13.优选地,所述用于激发储备池内部动态的输入信号和掩码信号不是必须的,即根据需要输入或者不输入。
14.优选地,定位问题按照回归任务,或者按照分类任务,对延迟储备池计算进行训练。
15.优选地,所述输出连接权和储备池计算的输出结果在线获得,或者离线获得;通过电的方式获得,或者用光的方式获得。
16.本发明与现有技术相比较,具有如下显而易见的突出实质性特点和显著优点:
17.1.本发明采用储备池计算的方式对系统进行训练与测试来实现分布光纤振动传感功能,不需要建立精确的机理模型,也不需要对信号解调或写出振动位置的关系式;
18.2.利用光或光电延迟非线性系统实现储备池计算,相比软件实现的储备池计算,虚节点状态获取速度快,因此,信号识别和定位的过程也很快;
19.3.通过对延迟储备池计算的训练,可同时建立信号识别和定位模型,一次性解决信号识别和定位功能;
20.4.整个信号识别和定位的处理过程都很简单,因为储备池计算训练过程只需计算输出权重,测试过程只需要把输出连接权与测试信号的虚节点状态相乘;
21.5.储备池计算具有强大的学习能力和建模能力,因此,不需要提取信号特征,识别和定位结果也不易受噪声影响,快速、准确。
附图说明
22.图1为本发明的系统结构示意图。
23.图2为本发明优选实施例的分布光纤传感系统结构示意图。
24.图3为本发明优选实施例中传感光纤上不同振动点的布局图。
25.图4为本发明优选实施例中,外界振动类型为正弦和脉冲信号时,滤波前后系统输出信号的时域波形。
26.图5为本发明优选实施例中,外界振动类型为正弦和脉冲信号时,五个传感位置下系统输出信号的时域波形。
27.图6为本发明优选实施例中虚节点数取最优值30时得到的测试结果。
具体实施方式
28.以下结合具体的实施例子对上述方案做进一步说明,本发明的优选实施例详述如下:
29.实施例一:
30.在本实施例中,参见图1,一种基于储备池计算的分布光纤传感系统,由输入层、储备池和输出层组成。所述输入层有两个节点,一个输入储备池激励信号,另一个输入外界振动信号;所述储备池由一个延迟非线性系统构成,其延迟光纤即为传感光纤;所述输出层有两个节点,一个输出振动类型,另一个输出振动位置。
31.本实施例把光纤延迟非线性系统既作为储备池又作为传感器使用,利用储备池计算的响应来检测外界振动信号;通过机器学习的思路,即储备池计算的训练和测试,来完成对外界振动信号的类型识别和位置确定。不需要建立精确的机理模型,也不需要对信号解调或写出振动位置的关系式。
32.实施例二:
33.本实施例与实施例一基本相同,特别之处在于:
34.在本实施例中,所述输入层用于输入储备池激励信号的节点不是必须的,即根据需要有或者没有。
35.在本实施例中,所述延迟非线性系统是全光延迟形式,或者是光电延迟形式,具体结构方面要求其既具备储备池的属性,又对不同位置不同类型的外界振动有不同的响应。
36.相比用软件实现的储备池计算,本实施例的虚节点状态获取速度快,因此,信号识别和定位的过程也很快。
37.实施例三:
38.本实施例与上述实施例基本相同,特别之处在于:
39.在本实施例中,参见图2,利用延迟互注入半导体激光器系统构成储备池和分布光纤传感器。激光器1和激光器2都是无内置隔离器的半导体激光器。两个偏振控制器用于调整注入两激光器的光偏振态。连接两个激光器的一段光纤作为传感光纤,一个相位调制器插入传感光纤来模拟外界振动对传感光纤的作用,即作为唯一的输入节点,用来输入外界振动信号。为了弥补互注入通道上光的损耗,保证两激光器有足够的互注入强度,在互注入通道放置一个光放大器。通过一个1
×
2耦合器输出部分光信号,经光电探测器转成电信号。电信号被采集、在计算机上处理,获得虚节点状态。以振动类型和振动位置为输出目标对互注入半导体激光器储备池计算进行训练,即输出节点为两个,一个输出振动类型,另一个输出振动位置。
40.激光器1选用天津峻烽光联科技有限公司的dfb可调半导体激光器dfb200903,其输出功率范围为0~13mw,中心波长调谐范围为1548.92~1551.32nm。激光器2选用该公司的dfb半导体激光器模块dfb200904,其输出功率为12.58mw,中心波长为1550.004nm。两个偏振控制器都采用general photonics公司的光纤挤压器(plc-001)。相位调制器为covega公司的linbo3电光相位调制器(10053),其驱动信号由agilent公司的信号发生器(33250a)提供。光放大器为thorlabs公司的半导体光放大器boa1004s。所有光纤均采用g.652标准单模光纤,其中,传感光纤的长度为600m。1
×
2耦合器的耦合比为50:50。光电探测器为深圳飞通公司生产的pin-tia探测器。用pico公司的picoscope 5203数字示波器采集电信号,信号
处理是在具有intel(r)core(tm)i5-8250u cpu@1.60ghz、16gb ram和windows 10系统的普通微型计算机上用matlab软件实现。
41.实施例四:
42.在本实施例中,一种基于延迟储备池计算的分布光纤传感系统的信号识别与定位方法,利用实施例一所述基于延迟储备池计算的分布光纤传感系统,包括如下步骤:
43.步骤1:系统启用前,先对延迟储备池计算进行训练。把一个优选的输入信号经过掩码后输入光储备池,激发出丰富的内部动态;在传感光纤的不同位置处施加各种振动类型信号,采集储备池的响应信号,获取相应的虚节点状态;以外界振动信号的类型和位置为目标输出进行网络训练,使储备池计算的输出逼近目标输出,确定合适的输出连接权。
44.步骤2:系统启用后,使用与训练阶段同样的输入信号和掩码信号激发储备池内部动态,采集储备池的响应信号,获取待测振动信号的虚节点状态,结合训练阶段得到的输出连接权,求得延迟储备池计算的输出,即振动信号的类型与位置。
45.本实施例通过对延迟储备池计算的训练,可同时建立信号识别和定位模型,一次性解决信号识别和定位功能;训练过程只需计算输出权重,测试过程只需要把输出连接权与测试信号的虚节点状态相乘,所以整个信号识别和定位的处理过程都很简单;储备池计算具有强大的学习能力和建模能力,因此,不需要提取信号特征,识别和定位结果也不易受噪声影响,快速、准确。
46.实施例五:
47.本实施例与上述实施例基本相同,特别之处在于:
48.在本实施例中,所述用于激发储备池内部动态的输入信号和掩码信号不是必须的,即根据需要输入或者不输入。
49.在本实施例中,定位问题按照回归任务,或者按照分类任务,对延迟储备池计算进行训练。
50.在本实施例中,所述输出连接权和储备池计算的输出结果在线获得,或者离线获得;通过电的方式获得,或者用光的方式获得。
51.实施例六:
52.本实施例与上述实施例基本相同,特别之处在于:
53.在本实施例中,按照如下步骤进行信号识别与定位。
54.步骤1,系统启用前,先对延迟储备池计算进行训练。利用分类模型进行定位,把传感光纤分成5段,每段的中点与激光器1的距离分别为0m、120m、240m、360m、510m,如图3所示,分别把相位调制器接在这些位置,模拟其中一个位置处传感光纤受到外界振动信号的作用。分别用正弦和脉冲信号驱动相位调制器,采集储备池的响应信号,即互注入半导体激光器系统的输出信号。为了获得更好的识别和定位效果,对采集的信号进行巴特沃斯低通滤波处理,以消除高频噪声的影响。图4以位置1为例,分别给出了正弦和脉冲信号的响应信号滤波前后的时域波形。截取时长为3倍传感光纤传输时间的、含有外界振动信号的响应信号的有效片段,并进行归一化处理。总共获得1400个信号片段。在振动信号分别为正弦和脉冲、5个传感位置下系统输出的信号波形如图5所示。
55.设虚节点数为n,从每一个信号片段中提取3n个数据作为储备池的虚节点状态,并将1400个信号片段所分别对应的虚节点状态组合在一起,作为整体虚节点状态数据集,其
信号类型与位置作为对应的输出标签。将虚节点状态数据集的80%,对应于1120个信号片段,用于训练。在训练过程中,已知1120个目标输出和虚节点状态,通过伪逆算法,求得储备池计算的输出权重。
56.步骤2,系统启用后,即进入储备池计算的测试过程。将虚节点状态数据集剩余的20%,对应于280个信号片段,用于测试。利用训练阶段得到的输出连接权与280个虚节点状态相乘,求得测试输出,对测试输出进行判决处理,从而得到信号的类型与位置。
57.在训练和测试过程中我们发现,虚节点数n的变化对信号的识别与定位起到了很重要的作用。随着n的增大,训练结果的分类正确率逐渐提升,直至变为100%,即没有分类错误,但是,测试结果的分类正确率却有一个先升高后降低的趋势。在虚节点数等于30时,测试的分类正确率最大,当虚节点数大于30时,产生了过拟合的现象。因此,我们选取30个虚节点。此时的测试结果如图6所示。振动类型的测试输出经判决后得到的测试输出标签,与目标输出标签的一致性非常高,只有极个别测试输出标签本该为“1”的误判为“2”,振动类型的分类正确率,即信号识别率可达99.64%;振动位置的测试输出经判决后得到的测试输出标签,与目标输出标签的一致性也比较好,只有少量测试输出标签误判为相邻的目标输出标签,振动位置的分类正确率,即定位准确率可达91.43%。
58.上面对本发明实施例结合附图进行了说明,但本发明不限于上述实施例,还可以根据本发明的发明创造的目的做出多种变化,凡依据本发明技术方案的精神实质和原理下做的改变、修饰、替代、组合或简化,均应为等效的置换方式,只要符合本发明的发明目的,只要不背离本发明的技术原理和发明构思,都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1