基于深度相机的石油钻井岩屑在线体积检测系统
1.本发明涉及石油钻井检测技术领域,具体涉及了基于深度相机的石油钻井岩屑在线体积检测系统。
背景技术:
2.石油钻井钻探时,地下岩石被钻杆研磨成岩屑,被润滑泥浆带出井下,通过振动筛分离后,流入岩屑堆积区域堆积。单位时间内振动筛分离出的岩屑体积,对于钻井钻探状态具有重要的参考价值。但是,由于岩屑包含大量泥水,基于称重等接触式检测方式的设备可靠性较差,难以在钻井现场使用安装,导致岩屑在线体积检测一直是一个难题。
技术实现要素:
3.针对现有技术的不足,本发明提供基于深度相机的石油钻井岩屑在线体积检测系统,用于在线检测石油钻井钻探时井下由泥浆带出的岩屑体积,为石油钻探提供钻探信息。
4.本发明的基于深度相机的石油钻井岩屑在线体积检测系统,包括悬吊在传送带上方且集成在机壳内的深度相机、嵌入式计算机和4g/5g网络模块;深度相机通过usb信号线连接嵌入式计算机;嵌入式计算机通过rs-485总线连接电机驱动器,从而控制电机的实际转速;嵌入式计算机通过有线或者无线连接4g/5g网络模块;
5.在钻井井口位置设置振动筛,传送带一端设置在振动筛下端;传送带的驱动端转动连接电机的输出轴,传动带通过电机驱动,电机电性连接电机驱动器,电机的转速受到电机驱动器的控制;
6.井下岩屑被泥浆带出钻井,通过振动筛分离,泥浆从振动筛上流出,掉落在传送带一端上,被传送带输送到堆积区;
7.深度相机定期拍摄岩屑照片,照片数据通过usb信号线传送至嵌入式计算机;嵌入式计算机基于双目视觉算法,计算获得岩屑表面在深度相机坐标系中的三维坐标,进而计算岩屑表面高度和岩屑体积;嵌入式计算机根据岩屑表面高度调节传送带速度,使岩屑高度基本稳定在15mm~25mm范围内,以增加检测精度;嵌入式计算机将传送带速度转换为传送带驱动电机的转速,通过rs-485总线将转速发送到电机驱动器,从而控制电机的实际转速;
8.嵌入式计算机通过以太网线将岩屑体积检测结果发送至4g/5g网络模块,由4g/5g网络模块通过移动网络发送至个人电脑和智能手机上的网页服务器存储;钻井钻探相关人员通过个人电脑或智能手机访问网页服务器,网页服务器将检测结果以web页面方式发送至个人电脑或智能手机,使钻井钻探相关人员能够远程在线查看钻井岩屑体积变化信息。
9.优选的,深度相机周围安装补光灯,深度相机镜头垂直向下俯瞰传送带表面的岩屑;为保证夜间或光照不足情况下能够正常检测岩屑体积,曝光不足时打开补光灯提供照明。
10.与现有技术相比,本发明的有益效果如下:
11.基于机器视觉方式,通过深度相机对岩屑进行在线体积检测。由于相机与被检测岩屑不直接接触,且具有一定间距,能够有效避免泥水对检测设备的损害。
12.激光线扫相机通常在工业环境中用于在线检测传送带上物体的外形、体积等。激光线扫相机硬件成本通常是深度相机十倍以上,且对于环境影响很敏感,通常应用于室内生产环境,不适合于在环境相对恶劣的石油钻井环境中使用。本发明使用低成本、对环境干扰相对不敏感的深度相机在线检测岩屑体积,使该发明能够在钻井油田中得到广泛使用。
13.检测系统将检测结果通过移动网络发送至网页服务器存储,钻井钻探相关人员可通过个人电脑和智能手机远程访问网页服务器,通过web页面查看岩屑体积,从而实时在线掌握钻井岩屑体积变化信息,为钻井钻探提供必要的决策辅助信息。
附图说明
14.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
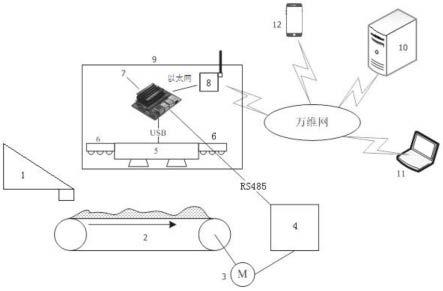
15.图1为本发明的基于深度相机的石油钻井岩屑在线体积检测系统的结构图。
16.图中:振动筛1、传送带2、电机3、电机驱动器4、深度相机5、补光灯6、嵌入式计算机7、4g/5g网络模块8、机壳9、网页服务器10、个人电脑11、智能手机12。
具体实施方式
17.以下将以图式揭露本发明的多个实施方式,为明确说明起见,许多实物上的细节将在以下叙述中一并说明。然而,应了解到,这些实物上的细节不应用以限制本发明。也就是说,在本发明的部分实施方式中,这些实物上的细节是非必要的。此外,为简化图式起见,一些习知惯用的结构与组件在图式中将以简单的示意的方式绘示之。
18.另外,在本发明中如涉及“第一”、“第二”等的描述仅用于描述目的,并非特别指称次序或顺位的意思,亦非用以限定本发明,其仅仅是为了区别以相同技术用语描述的组件或操作而已,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
19.如图1所示的基于深度相机的石油钻井岩屑在线体积检测系统,包括悬吊在传送带2上方且集成在机壳9内的深度相机5、嵌入式计算机7和4g/5g网络模块8;深度相机5通过usb信号线连接嵌入式计算机7;嵌入式计算机7通过rs-485总线连接电机驱动器4,从而控制电机3的实际转速;嵌入式计算机7通过有线或者无线连接4g/5g网络模块8;电机3型号为yb2-132s-4h;电机驱动器4型号为ma806;深度相机5型号为zed 2/zed 2i。
20.在钻井井口位置设置振动筛1,传送带2一端设置在振动筛1下端;传送带2的驱动端转动连接电机3的输出轴,传动带2通过电机3驱动,电机3电性连接电机驱动器4,电机3的转速受到电机驱动器4的控制;
21.深度相机5定期拍摄岩屑照片,照片数据通过usb信号线传送至嵌入式计算机7;嵌入式计算机7基于双目视觉算法,计算获得岩屑表面在深度相机5坐标系中的三维坐标,进
而计算岩屑表面高度和岩屑体积;嵌入式计算机7根据岩屑表面高度调节传送带2速度,嵌入式计算机7将传送带2速度转换为传送带2驱动电机3的转速,通过rs-485总线将转速发送到电机驱动器4,从而控制电机3的实际转速;
22.嵌入式计算机7通过以太网线将岩屑体积检测结果发送至4g/5g网络模块8,由4g/5g网络模块8通过移动网络发送至个人电脑11和智能手机12上的网页服务器10存储。
23.在深度相机5周围安装补光灯6,深度相机5镜头垂直向下俯瞰传送带2表面的岩屑;为保证夜间或光照不足情况下能够正常检测岩屑体积,曝光不足时打开补光灯6提供照明。
24.实施例:本发明工作步骤如下:
25.1)钻井钻探所产生的岩屑,被泥浆带离井下,通过振动筛1分离;
26.2)岩屑在振动筛1的尾部掉入传送带2上,由传送带2运至堆积区,传送带2由电机3驱动,电机3受到电机驱动器4的控制;
27.3)深度相机5、补光灯6、嵌入式计算机7、4g/5g网络模块8集成安装在机壳9中,悬吊在传送带2上方,使深度相机5俯瞰拍摄传送带2上的岩屑图像;
28.4)岩屑图像传输至嵌入式计算机7中,基于双目视觉算法计算出岩屑表面在深度相机5坐标系中的坐标,进而计算出岩屑表面高度和体积;
29.5)嵌入式计算机7根据岩屑表面高度调节传送带2速度,使岩屑表面高度保持在15mm~25mm范围内,从而提高检测精度;嵌入式计算机7将传送带2速度转换为电机3转速,发送至电机驱动器4,从而控制传送带实际速度;
30.6)嵌入式计算机7通过以太网线将岩屑体积检测结果发送至4g/5g网络模块8,由其发送至网页服务器10存储;
31.7)钻井钻探相关人员通过个人计算机11,或智能手机12访问网页服务器10。网页服务器10将岩屑体积检测结果以web页面形式发送至个人计算机11或智能手机12,从而使钻井钻探相关人员能够实时查看岩屑体积变化。
32.以上所述仅为本发明的实施方式而已,并不用于限制本发明。对于本领域技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原理的内所作的任何修改、等同替换、改进等,均应包括在本发明的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1